« Способ относится к технике автоматического регулирования и может быть иснользовап для регулирования различных объектов нри наличии высокого уровня помех на входе системы, а также нри высоком уровне высокочастотных шумов ее аппаратуры.
Известен способ формирования управляющего воздействия с использованием переменных структур, заключающийся в том, что на основе измерения сигнала ощибки системы формируется сигнал функции переключения в виде суммы сигналов ошибки и ее нронзводпых с числом членов на единицу меньше порядка системы. По сигналу функций переключений в зависимости от совпадения или несовпадения его знака и знака сигнала ошибки и его производных нереключается сигнал ошибки, сигналы ее производных, а также некоторые промежуточные координаты таким образом, что при совпадении знаков сигнала нереключения с переключаемым сигналом последний подключается на управление согласно устойчивой структуре, а при несовпадении их знаков - по неустойчивой структуре. Благодаря этому в системе устанавливается скользящий режим, ее поведение определяется управлением функции нереключений и не зависит от изменения параметров регулируемого объекта. Ошибка системы при этом за счет переключений измеряемых входных сигналов или некоторых координат системы, например координаты исполнительного привода, стремится к нулю, т. е. обеспечивается астатизм высокого но
рядка.
Недостаток рассмотренного способа связан с трудностямн получения производных высокого порядка в условиях шумов и с невозможностью вынолнения ноэтому условия
скользяшего режима, что нриводит в случаях высокого уровня шумов к утрате системами приемных структур описаппых положительных свойств. Известен также снособ, обеснечиваюший
некоторое повышение помехоустойчивости за счет предварительной линейной фнльтрацнн сигнала ошибки и снижения порядка производных, формируемых в функции переключения. В известном способе это достигается за
счет компенсирующего эту фильтрацию дифференцирования после переключений во вспомогательном контуре, сформированном с номощью промежуточных координат объекта на основе принцинов переменных структур.
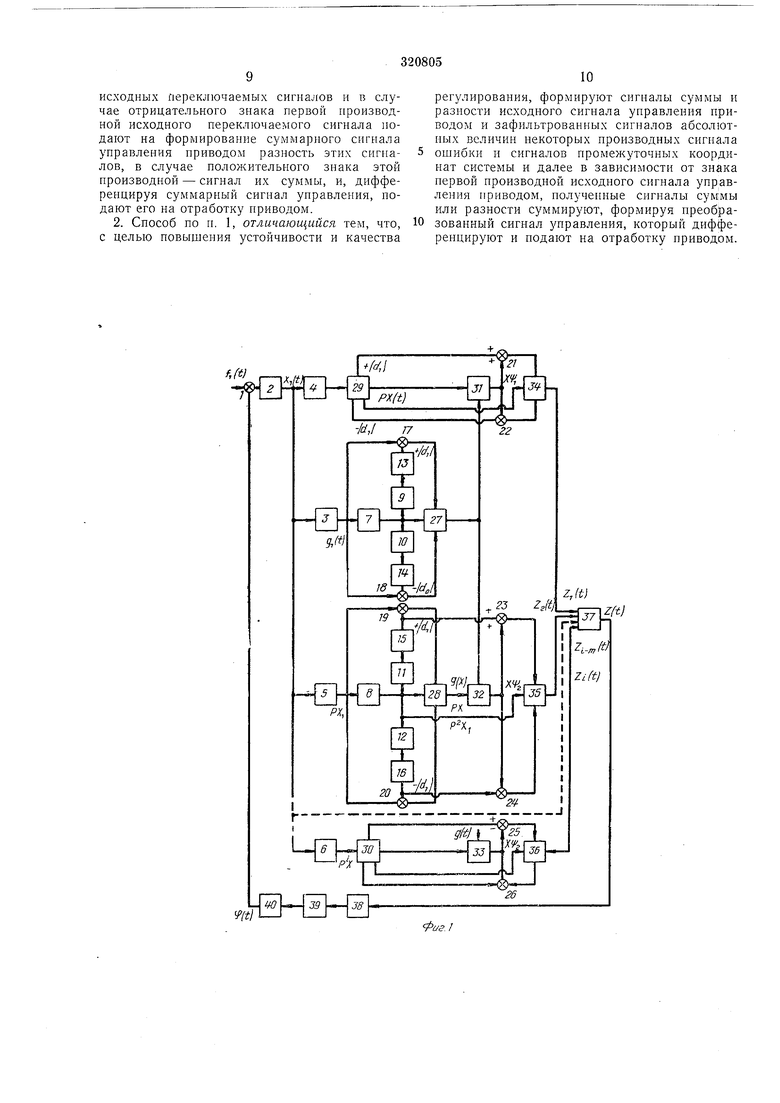
Этот способ формирования управляющего воздействия позволяет сохранить работоспособность систем е переменной структурой только при наличии относительно невысокого уровня шумов нутем обеспечения частотно шумов известный способ не обеспечивает получения производных высокого порядка, так как наличие существенных нелинейиостей в самой системе, например в исполнительных приводах, не обеспечивает достаточного подавления уровня шумов в пей, В отличие от известного способа исходные сигналы переключения и переключаемые сигналы но предлагаемому способу не используются непосредственно в переключениях, характерных для систем переменной структуры, а нрименяются для формирования из них и из их производных дополнительных сигналов, которые и носылают на кусочнолинейные переключения, свойственные неременным структурам. Получение этих дополнительных сигналов с помощью указанного принципа нелинейной компенсацнн шумов поясним на примере переключаемого сигнала, пропорционального сигналу по первой производной ошибки системы. Исходный переключаемый сигнал дополнительно дифференцируется один или (п-1) раз, выделяется сигнал, равный по величине первой его производной, далее абсолютные величины производных фильтруются и путем алгебраического суммирования исходного сигнала с зафильтрованным сигналом абсолютной величины производной соответствующего знака формируется сумма и разность исходного переключаемого сигнала и зафильтрованного сигнала абсолютной величины его производпой. При положительном значении первой производной исходного сигнала на переключение подается сигнал, пропорциональный разности указанных сигналов, при отрицательном знаке производной исходного сигнала - пропорциональный сумме этих сигналов. Аналогично преобразуется сигнал ошибки и остальные исходные переключаемые сигналы и сигналы переключения. Преобразования сигналов можно записать в следующем виде: „(f.(t)(i} ирнрУп()0 ... U, y,i (О + I d, (f) 11 при ру,, (t) О У1г(0-сигнал, в качестве которого может быть соответствующий исходный переключаемый сигнал пли исходный сигнал переключения; yi(t -преобразованный сигнал переключения или переключаемый сигнал;di(t) -зафильтрованный сигнал абсолютной величины производной соответствующего исходного сигнала;ki - коэффпциент пропорциональности. переменной структуры с той лишь разницей, что прп этом переключаются соответствующие преобразованные по формуле (1) сигналы. Переключения выполняются таким образом, что прп совпадении знаков преобразованных сигналов переключения и переключаемых сигналов последние подключаются на управление согласно устойчивой структуре, а при несовпадении знаков этпх сигналов - согласно неустойчивой структуре. Полученные после переключения сигпалы дополнительно преобразуются в обратной последовательности по сравнению с формулой (1), т. е. формируется сумма и разность переключенного сигнала и зафильтрованпого сигнала абсолютной величины производной соответствующего ему исходного сигнала; затем при положительном знаке первой производной исходного сигнала используются сигналы, равные сумме указапных сигналов, прп отрицательном - разности этих сигналов. Преобразование описывается формулой: /л i + 1 г W i при py,i (f) о k, X,, - 1 (d, (f) I при py „ (0 0, где x,ii - переключенный сигнал i-й цепи. Сигналы после преобразования согласно формуле (2) суммируются с целью получения сигнала управления приводом. Полученный суммарный сигнал далее дифференцируется с целью компенсации фазового запаздывания и подается на обработку приводом системы. Чтобы обеспечить необходимое качество регулирования системы и ее устойчивость в случае существенного изме}1епия параметров объекта при работе системы в режиме простых переключений и увеличить степень подавления помех в заданной полосе частот сигнал управления приводом подвергают преобразованию в соответствии с формулой (1). В этом случае в качестве слагаемых и вычитаемых в формуле (1) используются зафильтрованные сигналы абсолютных величин, производных некоторых промежуточных координат илн выходной координаты системы, а таклсе некоторых преобразованных пропзводных сигнала ошибки. Сигпалы промежуточных координат или сигналы выхода системы в этом случае дифференцируются, выделяется зафильтрованный сигнал абсолютной ве/:ичины и формируются суммы и разности .исходного сигнала управления прпводом и каждого зафильтрованного сигнала абсолютных величин производной сигнала промежуточкой или выходной координаты системы и зафильтрованного сигнала абсолютной величины некоторых производных сигнала ошибки. В случае положительного знака первой производной исходного сигнала управлеПИЯ приводом на отработку приводом подается сигнал полученной разности, а в случае отрицательного значения указанной производной - сигнал суммы. Для установления скользящего режима подключение сигкачестве слагаемых зафильтрованные сигналы абсолютных величин производных ошибки и возможно сигнала нереключения, формирование нреобразованного сигнала управления приводом производят при обратном соотно-5 шеиии знака первой производной исходного сигнала управления. Иными словами, при положительном знаке его первой производной используют сигнал суммы, при отрицательном - сигнал разности исходного сигналаЮ управления приводом и зафильтрованного сигнала абсолютной величины, соответствующей преобразованной или непреобразованной производной ошибки системы, а также сигнала переключения. Полученный в резуль- 5 тате суммирования составляющих преобразованный сигнал управления далее дифференцируется и подается на отработку приводом системы. Блок-схемы, приведенные на фиг. 1 и 2, 20 иллюстрируют предлагаемый способ. На фиг. 1 и 2 обозначено: 1- датчик сигнала ошибки системы; 2- фильтр; 3- блок формирования исходного сигнала 25 переключения; 4-6 - блоки формирования исходных переключаемых сигналов по ошибке системы по первой и i-й ее производной; 7-5 - блоки дифференцирования соответ- 30 ствующих исходных сигналов; 9-12-блоки формирования абсолютных величин производных исходных сигналов соответствующего знака; 13-16 - блоки фильтров; 17-26- суммирующие блоки; 27, 28 - логические элементы выделения нреобразованных сигналов; 29, 30 - блоки формирования преобразованных сигналов; 31-33 - элементы кусочно-линейного переключения сигналов, учитывающие знак.соответствующих переключаемых сигналов и сигналы переключения g( 34-36 - элементы компепсационного пре- 45 образования переключенных сигналов; 37 - суммирующий блок формирования исходного сигнала управления приводом z(t}; 41, 42 - блоки дифференцирования сигнала промежуточной координаты c(t) и исходного 50 сигнала унравления z (/); 43, 44 - блоки формирования абсолютных величин производной координаты c(t соответствующего зиака; 45, 46 - фильтры; 47-50 - суммирующие блоки; 51, 52 - логические элементы выделения составляющих преобразованного сигнала; 53-суммируюший блок формирования60 преобразованного сигнала управления приводом 2 (t. 35 40 55 в датчике / как разница между входным сигналом fi(t) и выходным сигналом ф(0, сигнал ошибки фильтруется в фильтре 2 и путем многократного дифференцирования сигнала xi(t) и суммирования полученных производных с сигналом ошибки Xi(f) в блоке формирования исходного сигнала переключения 3 получается сигнал переключения gi(t), а в блоках 4-6 формируются исходные перекл Ючаемые сигналы, пропорциональные соответственно ошибке системы, первой и i-й ее производной, где ,..., п-1 (п - порядок системы)Из указаннь1х исходных сигналов согласно предлагаемому способу формируются преобразованные сигналы, которьге подаются в элементы кусочно-линейного переключения 3}, 32, 33. Порядок операций, которым подвергаются исходные сигналы, рассмотрим иа примере получения преобразованного переключаемого сигнала по производной сигнала ошибки (по остальным сигналам эти операции аналогичны). Исходный переключаемый сигнал рх, с выхода блока 5 преобразуется в блоке 8, представляющем собой реальное дифференцирующее звено. Сигнал с выхода блока 5, пропорциональный производной сигнала рх, подается на входы блоков 11 12. Сигналы с выходов блоков 11 п 12 фильтруются в блоках /5 и /5 и поступают в блоки суммирования 19 и 20, где формируется сумма и разность исходного переключаемого сигнала px-i с выхода блока 15 и зафильтрованных сигналов абсолютной величины его производной + di и dz с выходов блоков 15 и 16. Сигналы, пропорциональные сумме (блок 19) и разности указанных сигналов (блок 20), вместе с сигналом первой производной с выхода блока 8 поступают на входы логического элемента выделения преобразованного сигнала 28, который в соответствии с формулой (1) в случае положительного знака первой производной ис.ходного сигнала pXi, выделяет на выходе сигнал, пропорциональный разности сигналов, а в случае отринательного знака первой нроизводной, т. е. сигнал, пропорциональный сумме указанных сигналов. Аналогично преобразуются сигналы ошибки и i-й ее производной в блоках формирования преобразованных сигналов 29, 30 соответственно. Блоки 29, 30 содержат составляющие элементы, аналогичные элементам 7, 5, JO, 13, 14, 17 п 18, входящим в блок формирования преобразованного переключаемого сигнала рх или соответственно элементам 7, 9, 10, 13, 14, 17 и 18 входяш;им в блок формирования преобразованного сигнала переключения полярностей связей между группой элементов контура управления g(). Преобразованный переключаемый сигнал рх с вы.хода блока 28 .и преобразованные подаются на соответствующие входы элементов кусочио-лииейиого иереключепня 31-33. В элементах 31-33 происходит подключение преобразованных переключаемых сигналов в зависимости от совиадения их знаков со 5 знаком преобразованного сигнала переключения нолярностей связей g(t) в соответствии с устойчивой или неустойчивой структурой. Далее сигналы с выходов элементов 31-33 подвергаются компенсационному преобразо- Ю ванию в соответствии с формулой (2) для чего формируются сигналы суммы и разности этих сигналов с зафильтрованными сигналами абсолютных величин нроизводных переключаемых сигналов в блоках 21-26 соот- 15 ветственно. Сигналы суммы н разности с этих блоков поступают на входы элементов компенсационного преобразования 34-36, на управляющие входы которых подаются сигналы, пропорциональные первым нроизвод- 20 ным исходных переключаемых сигналов с выходов блоков 29, 8 и 30 соответственно. Скомпенсированные, нреобразованные нереключенные сигналы с выхода элементов 34- 36 подаются на вход суммирующего блока 25 37, с выхода которого получают исходный сигнал управления приводом z(t). Для компенсации фазового запаздывания, вносимого фильтром 2 и отчасти нелинейными преобразованиями, сигнал управления приводом диф- 30 ференцируют в блоке 38 и подают на отработку приводом 39 системы. С целью повышения помехоустойчивости системы за счет снижения уровня высокочастотных помех исходный сигнал нереклю- 35 чения полярностей связей, сформированный в блоке 3, может быть получен путем суммирования преобразованных сигналов ощибки и (я-1) производных, полученных в блоках формирования преобразованных сигналов 40 соответственно с выхода блоков 13, 22, 24 и т. д. На фиг. 2 приведены элементы и блоки, введенные для повыщения устойчивости системы. Повыщение устойчивости достигается с помощью преобразования исходного сигнала управления г (t) с использованием сигна... лов промежуточном координаты c(t) и за-50 фильтрованного сигнала абсолютной величины преобразованной i-и производной сигнала ощибки, а также, возможно, производНОИ сигнала переключения. Использование зафильтрованнь1х сигналов преобразованных55 производных обеспечивает в режиме простых переключении увеличение подавления полосовых помех в случае применения преобразования по формуле (1) или обеспечение более надежного скользящего режима в случае при- Q менения преобразования по формуле (2). Рассмотрим случай преобразования сигна45производится в блоках 42-50 таким образом, что на выходе логического элемента 51 в случае отрицательного знака его первой производной получается сигнал суммы исходного сигнала управления приводом z (/) и зафильтрованного сигнала абсолютной величины производной промежуточной координаты c(t, получаемого с помощью блоков 41, 43, 45. 47. положительного знака пронзвод,, У управления приводом z (t) получается разность указанных сигналов, формируемых с помощью блоков 44, 46 и 48 .соответственно. Сигнал с выхода элемента 51 подается на вход суммирующего блока 55. В блоках 49, 50 формируется сумма и разность исходного сигнала управления приводом z (t) и зафильтрованного сигнала абсолютной величины i-й нроизводной сигнала ощибки, которые нодключаются с помощью логического элемента 52 также на вход блока 53 согласно формуле (1) или (2). На выходе суммирующего блока 53 получают преобразованный сигнал уиравления приводом z(t), который после компеисационпого дифференцирования в блоке 38 подается на отработку приводом 39. Предмет изобретения 1. Способ формирования управляющего воздействия систем автоматического регулирования, заключающийся в том, что измеряют зафильтрованный сигнал ощибки системы и не более (п-1) его производных, формируют сигпал переключения путем суммирования этих нроизводных с сигналом ощибки и подают сигналы, пропорциональные производным сигнала ощибки и некоторым иромежуточным координатам системы на переключение в соответствии с устойчивой и неустойчивой структурой в зависимости от совпадения или несовпадения их знаков со знаком сигнала переключения, и затем дифференцируют переключенные сигналы, отличающийся тем, что, с целью повыщения помехозащищенности системы регулирования, исходный сигнал переключения и переключаемые сигналы дифференцируют, выделяют абсолютные величины обоих знаков сигналов этих производных, которые затем фильтруют и полу ают сумму и разность исходного сигнала и зафильтрованного сигнала абсолютной величины его производной, и при положительном значении производной первого порядка исходного сигнала на переключение устойчивой ли неустойчивой структуры подают сигнал, пропорциональный разности полученных сигналов, при отрицательном знаке нервой производной исходного сигнала - пропорциональный сумме этих сигналов, далее формиисходных переключаемых сигналов и в случае отрицательного знака первой нроизводной исходного переключаемого сигнала подают на формирование суммарного сигнала управления приводом разность этих сигналов, в случае положительного знака этой производной - сигнал их суммы, и, дифференцируя суммарный сигнал управления, подают его на отработку приводом.
2. Способ по н. 1, отличающийся тем, что, с целью повышения устойчивости и качества
10
регулирования, формируют сигналы суммы и разности исходного сигнала управления приводом и зафильтрованных сигналов абсолютных величин некоторых производных сигнала
ошибки и сигналов промежуточных координат системы и далее в зависимости от знака первой производной исходного сигнала управления приводом, полученные сигналы суммы или разности суммируют, формируя преобразованный сигнал управления, который дифференцируют и подают на отработку приводом.



| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОЬ РЕГУЛИРОВАНИЯ ИНЕРЦИОННЫХ ОБЪЕКТОВ, ОПИСЫВАЕМЫХ ДИФФЕРЕНЦИАЛЬНЫМИ УРАВНЕНИЯМИп-ого ПОРЯДКА | 1969 |
|
SU239405A1 |
| СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1972 |
|
SU332435A1 |
| Способ управления системой с нелинейной коррекцией | 1974 |
|
SU526856A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Способ преобразования частоты следования импульсов в код | 1974 |
|
SU528701A1 |
| Способ регулирования частоты вращения двигателя внутреннего сгорания и устройство для его осуществления | 1983 |
|
SU1149045A1 |
| Способ формирования управляющего сигнала в системах автоматического регулирования | 1976 |
|
SU650052A1 |
| Устройство для стабилизации частоты вращения двигателя постоянного тока | 1984 |
|
SU1264284A1 |
| СПОСОБ УПРАВЛЕНИЯ ОБЪЕКТОМ (ВАРИАНТЫ) И СИСТЕМА (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2209443C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |

ад
Фиг.1 U i
