,
Известен ступенчато-унравляемый электропривод с асинхронным двигателем, обмотка статора которого подключается к сети через регулируемый блок, нанрнмер дроссель насыщения, включенный в замкнутую систему регулировання.
Однако для такого электропривода характерна ограниченная жесткость механических характеристик в результате статического регулирования заданной скорости врагцения.
Целью изобретения является новышение жесткости механических характеристик нрн статическом регулировании скорости.
Для этого к обмоткам статора и ротора двигателя через два иреобразователя частоты малой мощности с дискретно изменяемыми коэффициентами преобразователя подключены входы частотного н (|)азового датчиков, выходы которых через суммирующий усилитель подведены к цепи управления указанного регулирующего блока.
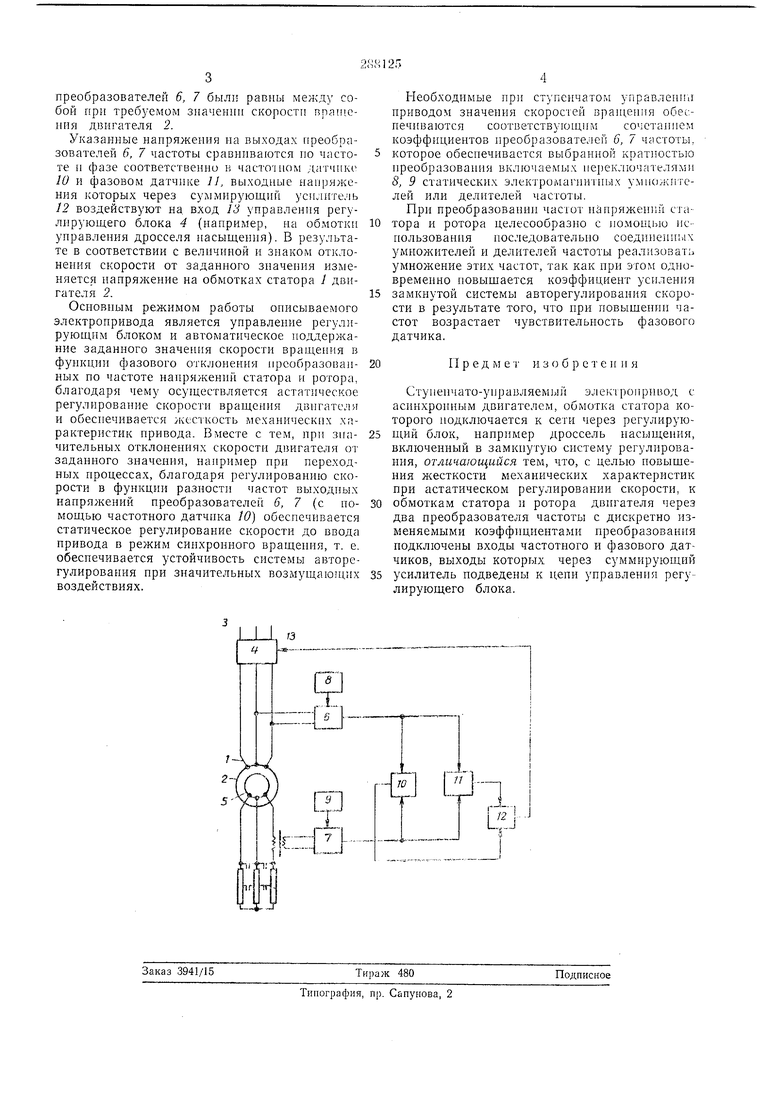
На чертеже приведена схема описываемого электроиривода.
Обмотка статора / асинхронного двигателя 2 подключена к сети 3 через регулирующий блок 4, например дроссель насыщения. К обмоткам статора / и ротора 5 двигателя через преобразователи 6, 7 частоты малой мощности с дискретно изменяемыми коэффициентами преобразования (например, посредством переключателей 6, 9) подключены входы частотного датчика 10 и фазового датчика П. Выходы этих датчиков через суммирующий усилитель 12 соединены со входом 13 управления регулирующего блока 4.
Преобразователи 6, 7 частоты с дискретио изменяемыми коэффициентами иреобразования вынолнеиы в виде нескольких иоследовательно соединенных однокаскадных статическнх электромагнитных умножителей и делителей частоты, благодаря чему обеспечивается требуемое (в соответствии с числом ступепей регулирования скорости) количество сочетаний коэффициентов иреобразования частот
напряжений статора / и ротора 5 двигателя 2. Предлагаемый электроиривод работает следующим образом.
При питании обмоток статора / двигателя 2 от сети через регулирующий блок 4 скорость
вращения двигателя онределяется величиной напряжения иа обмотках статора, которое зависит от состояния регулирующего блока 4, т. е. от величины сигнала па его входе 13 управления. Частоты напряжений на обмотках
статора 1 п ротора 5 вращающегося двигателя 2, находящиеся в соотнощении. соответствующем скорости вращения двигателя, с номощью преобразователей 6, 7 частоты нреобразуются, например умножаются в такое чиспреобразователей 6, 7 были равны между собой при требуемом значении скорости npauie1И1Я двигателя 2.
Указанные наиряжения на выходах преобразователей 6, 7 частоты сравниваются но частоте и фазе соответственно н часточиом датчике 10 и фазовом датчике 7/, выходные наиряжения которых через суммирующий усилитель 12 воздействуют на вход 13 управления регулирующего блока 4 (например, на обдмотки уиравления дросселя иасыщения). В результате в соответствии с величиной и знаком отклонения скорости от заданного значения изменяется напряжение на обмотках статора 1 двигателя 2.
Основным режимом работы оиисываемого электропривода является управление регулирующим блоком и автоматическое поддержание заданного значения скорости вращения в функции фазового отклонения преобразованных по частоте напряжений статора и ротора, благодаря чему осуществляется астатическое регулирование скорости вращения двигателя и обеснечивается жесткость механических характеристик привода. Вместе с тем, при значительных отклонениях скорости двигателя от заданного значения, например при переходных ироцессах, благодаря регулированию скорости в функции разности частот выходных напряжений преобразователей 6, 7 (с помощью частотного датчика W) обеспечивается статическое регулирование скорости до ввода привода в режим синхронного вращения, т. е. обесиечивается устойчивость системы авторегулирования при значительных возмущаюцих воздействиях.
Необходимые при ступенчатом управлепии приводом значения скоростей враи1еи11я обеспечиваются соответствуюи-1,им сочетанием коэффициеитов иреобразователей 6, 7 частоты,
которое обесиечивается выбранной кратностью преобразования включаемых переключателями 8, 9 статических электромагнитных умио/кителей или делителей частоты.
При преобразованин частот напряжений статора и ротора целесообразно с помои1ью неиользоваиия последовательно соединеипых умножителей и делителей частоты реализовать умножение этих частот, так как при этом одновременно повышается коэффициент усиления
замкнутой системы авторегулироваиия скорости в результате того, что при повышении частот возрастает чувствительность фазового датчика.
Предмет изобретения
Стуиенчато-унравляемый электронривод с асинхронным двигателем, обмотка статора которого подключается к сети через регулирующий блок, например дроссель насыщения, включенный в замкнутую систему регулирования, отличающийся тем, что, с целью новышеиия жесткости механических характеристик при астатическом регулировании скорости, к
обмоткам статора и ротора двигателя через два преобразователя частоты с дискретно изменяемыми коэффициентами преобразования подключены входы частотного и фазового датчиков, выходы которых через суммирующий
усилитель подведены к цени управления регулирующего блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| ЧАСТОТНО-УПРАВЛЯЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1969 |
|
SU235839A1 |
| УСТРОЙСТВО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2010 |
|
RU2412526C1 |
| Способ эксплуатации в синхронном режиме частотно-регулируемых асинхронных двигателей с фазным ротором | 2018 |
|
RU2694892C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| АСИНХРОННЫЙ ВЕНТИЛЬНЫЙ КАСКАД | 2011 |
|
RU2474951C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU904174A1 |
| Способ частотно-токового управления асинхронной машиной | 1973 |
|
SU680130A2 |
