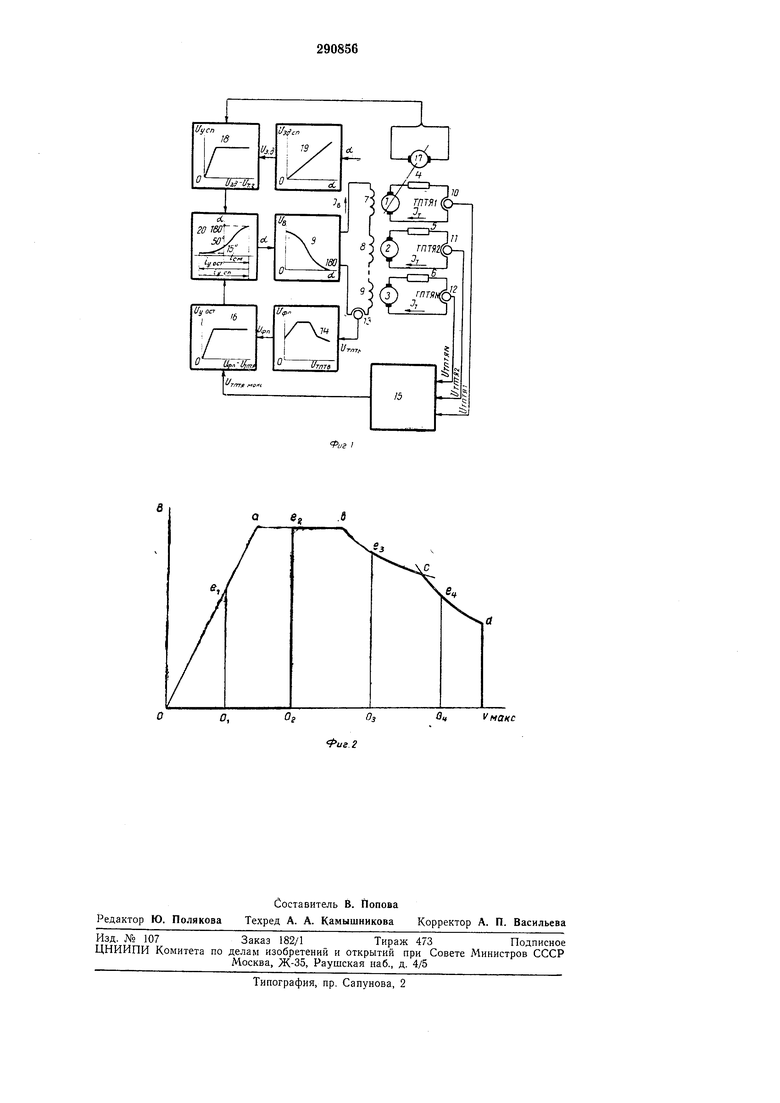
Известен способ плавного автоматического бесконтактного регулирования тормозной силы электроподвижного состава путем сравнения напряжений, пропорциональных заданным и истинным значениям скорости движения, ограничивающих предельную тормозную силу, в котором регулирование ведется отдельно в режиме ограничения скорости движения и в режиме регулирования тормозной силы по ее предельным значениям. Причем переход из одного режима регулирования в другой осуществляется скачкообразно переключением реле перехода. Такой способ регулирования требует переключения цепей управления и использования дополнительных устройств для выбора режима тормолсения. Предлагаемый способ обеспечивает бесконтактное плавное регулирование в обоих режимах и переход из одного режима в другой, что упрощает систему управления. Это достигается тем, что на систему возбуждения двигателя воздействуют встречно направленными сигналами элементов сравнения. Причем максимальные значения этих сигналов ограничены и одинаковы. Таким образом, указанные сигналы, встречно поданные в систему возбуждения - фазорегулятор и далее возбудитель, при уменьщении одного сигнала и наличии другого, и наоборот, осуществляют плавный ереход из одного режима регулирования в ругой. Данный способ поясняется электрической схемой, приведенной на фиг. 1. На фиг. 2 представлена характеристика автоматического торможения со сменой режима стабилизации скорости на поддерл ание максимального значения тормозной силы. Па схеме: f/з.д - задающее напряжение; /сн - ток смещения; 1 - тормозные токи; /, - ток возбуждения; /ф.п - напряжение функционального преобразователя; U-t. - напряжение в цепи якоря; f/т.г-напряжение тахогенератора; гу-ост-ток остановки. Якори /-5 тяговых двигателей включены на индивидуальные тормозные сопротивления 4-6. Обмотки возбуждения 7, 8 всех тяговых двигателей включены последовательно и питаются от выхода усилителя-возбудителя 9. В цепи обмоток возбуждения и всех якорей включены датчики токов, трансформаторы 10-13 постоянного тока. Выход трансформатора 13 включен на вход функционального преобразователя 14 (ФП). Выходы трансформатора 10-12 через логический элемент «ИЛИ 15 соединены со входом элемента 16 сравнения остановки, ко второму входу которого подключен функциональный преобразователь 14. Описанные элементы обеспечивают регулирование тормозной силы по всем ее ограничениям. Принципиально это регулирование может быть осуществлено любым другим способом.
Тахогенератор 17 является датчиком скорости движения. Его напряжение подается на вход блока 18 элемента сравнения спуска (ЭСС), на второй вход которого подается сигнал блока 19 задающего элемента скорости (ЗЭС). Сигналом выхода блока 18 является задающее напряжение бз.д, пропорциональное углу а поворота тормозной рукоятки. Напряжения выходов блоков 18 и 19 подаются на входы фазорегулятора 20. Последний изменяет фазу управляющих импульсов, поступающих на вход возбудителя 9, представляющего в схеме тиристорный управляемый выпрямитель.
По приведенным в условных изображениях элементов характеристикам видно, что в случае отсутствия других сигналов управления имеющийся постоянный сигнал смещения, (ток смещения устанавливает нулевое значение тока возбуждения /д. При этом тормозные токи /т минимальны (определяются остаточным магнетизмом двигателей), и тормозная сила близка к нулю.
Предположим, что напряжение 7з.д, выхода блока 19 равно нулю. Тогда и напряжение выхода блока 18 равно нулю. После включения тормоза напряжение выхода элемента /5 максимально, так как напряжение выхода, являющегося по существу задающим элементом, относительно велико, а L/r.. Поэтому, как видно по характеристикам фазорегулятора и возбудителя, /в будет стремиться увеличиться до максимума, но процесс роста /в прекратится в момент увеличения тока якоря /я до значения, при котором бт.я бф.п После этого при изменении скорости движения система будет регулировать ток якоря в соответствии со всеми его ограничениями, заданными характеристикой ФП. Если вместо ФП применять элемент с постоянным напряжением выхода, то система будет поддерживать постоянное значение /д. Если же на блоке 19 установлено УЭ.Д т.г при скорости включения для тормоза, то сигналы (Уу.с (напряжение увеличения скорости) с выхода блока 18 и гу.с (ток увеличения скорости) максимальны. Если последний сигнал направлен встречно iy.ocr и равен ему, то оба сигнала компенсируют друг друга и ток возбуждения остается равным нулю. Такое соотнощение бз.д и (Ут.г устанавливается машинистом в начале движения по спуску, когда скорость еще не достигла допустимого значения. По мере увеличения скорости движения t/T.r приближается к При этом постепенно уменьщается f/y.c, а поскольку гу.ост остается максимальным, то происходит рост /в (а, следовательно, и /т) до величин, определяемых ограничениями тормозной силы. При дальнейщем росте скорости движения ty.c уменьшается до нуля, и регулирование осуществляется каналом ограничений тормозной силы.
Если мащинист установит - /з.д t/T.r, (но больше нуля), то произойдет описанный выше процесс нарастания тормозной силы до максимального значения и регулирования ее по предельным значениям. По мере уменьшения
скорости до значения, при котором t/T..x. произойдет плавное увеличение ty.c до максимума. В результате тормозная сила упадет до нуля. Таким образом, данный способ обеспечивает
получение требуемой характеристики без переключения цепей управления и без использования дополнительных устройств для выбора режима торможения. Бесконтактное регулирование, осуществляемое только одной рукояткой (что очень важно для управления локомотивом вообще и тормозами в особенности), достигается за счет одновременного воздействия на систему возбуждения двух элементов сравнения с одинаковыми характеристиками.
Отличительной особенностью элементов является ограничение максимального сигнала выхода, что может быть достигнуто разными способами (в частности, использованием стабилитронов или применением в качестве элементов сравнения транзисторов, переводимых в состояние насыщения рабочей разностью заданных и истинных сигналов).
Предмет изобретения
Способ автоматического регулирования тормозной силы электроподвижного состава путем сравнения напряжений, пропорциональных заданным и истинным значениям .скорости движения, и сравнения напряжений, пропорциональных заданным и истинным значениям тормозной силы, и воздействием полученными сигналами рассогласования на систему возбуждения тяговых двигателей, отличающийся, тем, что, с целью повышения плавности
и надежности регулирования при переходе из одного режима регулирования в другой, указанные сигналы рассогласования непрерывно сравнивают между собой и полученным сигналом воздействуют на систему возбуждения,
причем максимальные значения сигналов рассогласования ограничены и равны друг другу.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 1967 |
|
SU192240A1 |
| СПОСОБ ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯТОРМОЗНОЙ CHJlbi | 1969 |
|
SU244373A1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава при электрическом торможении | 1976 |
|
SU1368201A1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1976 |
|
SU651988A1 |
| ЭЛЕКТРОННОЕ УСТРОЙСТВО ТОКОВОЙ ЗАЩИТЫ ББР ЭЛЕКТРОВОЗОВ СЕРИИ ВЛ80Р | 2011 |
|
RU2459717C1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1980 |
|
SU943024A1 |
| УСТРОЙСТВО для СТАБИЛИЗАЦИИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1968 |
|
SU220328A1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТОРМОЗНОЙ СИЛЫ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 1970 |
|
SU281525A1 |
| УСТРОЙСТВО ДЛЯ ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ ЭЛЕКТРОПОДВИЖНОГОСОСТАВА | 1968 |
|
SU218953A1 |
| Устройство для автоматического регулирования тягового электродвигателя электроподвижного состава | 1987 |
|
SU1521629A1 |
Q e.
QIОз
о.
Фиа 2
QifV макс
