Изобретение относится к области управления электроподвижным составом с электрическим торможением.
Известно устройство для автоматического регулирования тормозной силы электроподвижного состава, содержащее Тяговые двигатели независимого возбуждения постоянного тока; обмотки независимого возбуждения которых соединены последовательно и подключены к выпрямительной установке, а якорные обмотки двигателей включены последовательно с тормозными .резисторами. Датчики тока якорей подключены через логический элемент ИЛИ к одному из входов элемента сравнения сигналапо току якоря, выход которого подключен через фазорегулятор ко входу выпрямительной установки возбуждения, датчик тока возбужден ия, подключенный через функциональный преобразователь ко входу указанного элемента сравнения по toKy MtypWr Заданные значения тормозной силы от задатчиков остановочного и предварительного торможения на выпрямительные мосты, выбирающие максимальный.из поступающих на входы сигналов, задатчик и датчик скорости
подключены к элементу сигналов по скорости, имеющему транзисторный усилитель, при этом если заданная скорость больще действительной, то выходной транзистор открыт и полностью компенсирует сигнал, задающий тормозную силу, при этом тормозная сила равна нулю.
При заданной скорости, равной нулю.осуществляется торможение с максимальной силой вплоть до остановки, так как в этом случае выходной транзистор элемента сравнения по скорости все время закрыт. Когда же действительная скорость больше заданной, то торможение осуществляется только до заданной скорости движения, а затем тормозная сила уменьщается до нуля 1. Недостаток этого устройства заключается в том, что на участках со сложным профилем пути в автосцепках поезда при реостатном торможении возникают нежелательные реакции, которые могут при определенных неблагоприятных условиях привести к вьГталкиваниЮ баТоШё из состава. Объясняется это тем, что при выходе электровоза со спуска на площадку, вследствие равенства действительной и заданной скорости и
отсутствия скатывающей силы, система реостатного торможения сбрасывает тормозную силу до нуля. При этом сцепки ослабляются и состав растягивается. При переходе .электровоза на последующий уклон вначале происходит разгон состава, затем включение реостатного тормоза.и, вследствие набегания задних вагонов, в передней части состава возникают резкие динамические толчки.
Цель изобретения - повышение плавности изменения тормозного усилия в широком диапазоне скоростей.ч
Эта цель достигается тем, что транзисторный усилитель включен между задатчиком тормозной силы и элементом сравнения сигналов по току якоря, причем к элементу сравнения на входе усилителя подключены датчик и задатчик скорости.
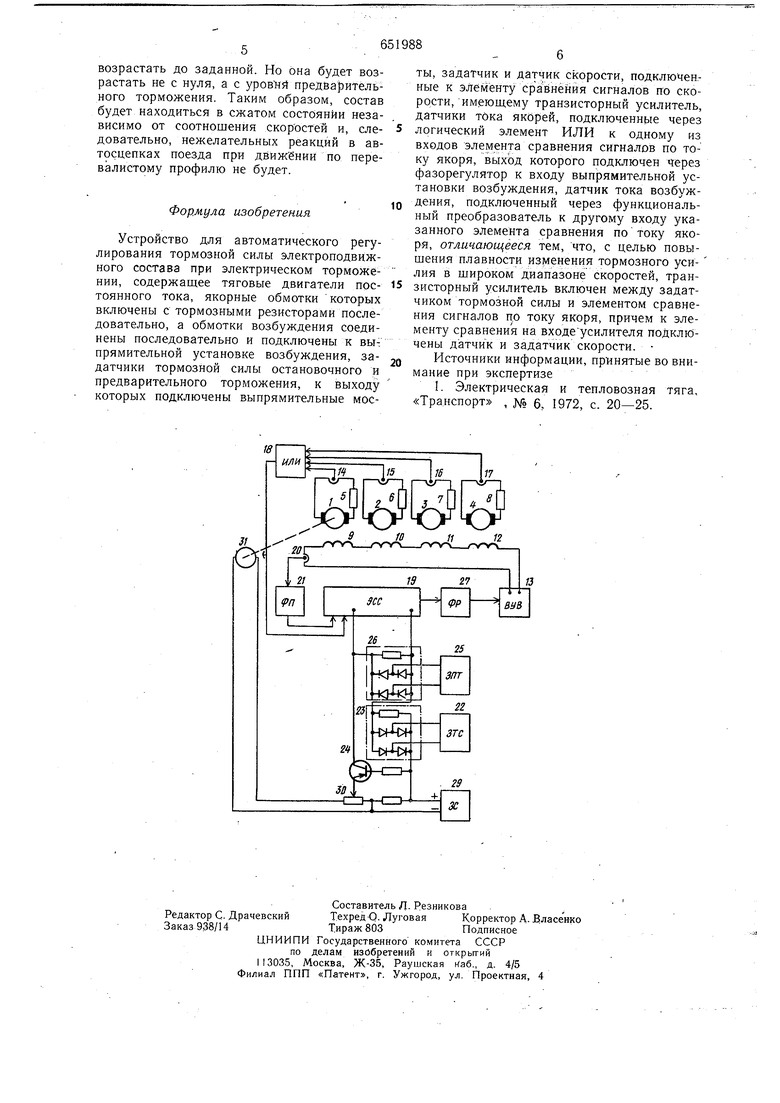
На схеме изображено устройство для автоматического регулирования тормозной силы электровоза ВЛ-8ОТ.
Якори тяговых двигателей 1, 2, 3, 4 включены на индивидуальные нерегулируемые тормозные резисторы 5, 6, 7, 8. Обмотки независимого возбуждения 9, 10, 11, 12 соединены между собой последовательно и подключены на выход выпрямительной установки возбуждения 13. В якорные цепи каждого двигателя включены датчики тока якоря 14, 15, 16, 17. Выходы этих датчиков соединены со входом логического элемента ИЛИ 18. Выход элемента ИЛИ подключен на первый вход элемента сравненйя сигналов 19. Датчик токавозбуждения 20, служащий для подачи обратной связи по току возбуждения, включен последовательно с обмотками возбуждения. Выход датчика тока возбуждения подключен на вход функционального преобразователя 21, выход которого соединен со вторым входом элемента сравнения 19. На третий вход элемента сравнения подключены выходы задатчика тормозной силы 22 через выпрямительный мост 23 и коллекторную цепь транзистора 24. Задатчик предварительного торможения 25 через выпрямительный мост 26 также подключен на третий вход элемента сравнения сигналов, на выходе которого включен фазорегулятор 27. Величина, пропорциональная заданной скорости, выделяется на резисторе 28, который подключен на выход задатчика скорости 29. Величина, пропорциональная истинной скорости, выделяется на резисторе 30, который подключен на выход датчика скорости 31.
Устройство для автоматического регулирования тормозной силы работает в двух режимах - в режиме остановочного торможения и в режиме стабилизации скорости на спуске. В режиме остановочного торможения заданное значение скорости равно 0. Тормозная рукоятка контроллера сначала устанавливается в положение «предварительное торможение, а затем, но истечении некоторого времени, переводится в режим «торможение. При этом включается питание задатчика тормозной силы 22 остановочного торможения. Так как сигнал с задатчика скорости равен О, то транзистор 24 будет все время открыт сигналом с датчика скорости и на вход элемента сравнения 19 будет поступать максимальный из двух сигналов (с задатчика тормозной силы 22 и задатчика предварительного торможения 25). Выбор-максимального из двух сигналов производит элемент ИЛИ, который образуется из двух мостов 23 и 26 при открытом транзисторе 24. На другой вход элемента сравнения поступает сигнал с преобразователя 21. Функциональный преобразователь служит для преобразования сигнала с датчика тока возбуждения в напряжения, функционально зависящие от тока возбуждения таким образом, что при его алгебраическом суммировании с напряжением задатчика тормозной силы получается напряжение, пропорциональное заданному значению тока якоря. На первый вход элемента сравнения поступает сигнал с датчика тока якоря. В элементе сравнения, в зависимости от поступающих сигналов, вырабатывается сигнал, величина которого определяет фазу выходного сигнала фазорегулятора 27. Этот сигнал поступает на управляющие электроды тиристоров установки возбуждения 13. Фаза управляющего импульса будет такой, чтобы обеспечить соответствующий ток возбуждения и ток якоря согласно характеристике функционального преобразователя. Заданная тормозная будет поддерживаться почти до полной остановки.
Если же режим движения предусматривает стабилизацию скорости на спуске, то задатчиком скорости задается определенная величина скорости движения. До тех пор, пока заданная скорость будет меньше действительной, процесс торможения будет происходить так, как описано выше. Но как только действительная скорость станет меньше, заданной, транзистор 24 закроется и отключит задатчик тормозной силы. Тормозная сила падает, но не до нуля, а до уровня величины предварительного торможения, обеспечивая поддержание состава в сжатом состоянии. Как только состав начнет снова разгоняться (что может быть при переходе на новый уклон) и, следовательно, действительная скорость движения станет больше заданной, сигналом датчика скорости транзистор открывается. При открытом транзисторе мосты 23 и 26 образуют схему ИЛИ, на вход которой поступают сигналы с задатчика тормозной силы и с задатчика предварительного торможения, а на выходе появляется больший из них. Этим большим сигналом будет сигнал с задатчика тормозной силы. Тормозная сила будет возрастать до заданной. Но она будет возрастать не с нуля, а с уровни предварительного торможения. Таким образом, состав будет находиться в сжатом состоянии независимо от соотношения скорЪстей и, следовательно, нежелательных реакций в автосцепках поезда при движении по перевалистому профилю не будет. Формула изобретения Устройство для автоматического регулирования тормозной силы электроподвижного состава при электрическом торможении, содержащее тяговые двигатели постоянного тока, якорные обмотки которых включены с тормозными резисторами последовательно, а обмотки возбуждения соединены последовательно и подключены к выпрямительной установке возбуждения, задатчики тормозной силы остановочного и предварительного торможения, к выходу которых подключены выпрямительные мосты, задатчик и датчик скорости, подключен,ные к элементу сравнёйия сигналов по скорости, имеющему транзисторный усилитель, датчики тОка якорей, подключенные через логический элемент ИЛИ к одному из входов элемента сравнения сигналов по току якоря, выход которого подключен через фазорегулятор к входу выпрямительной установки возбуждения, датчик тока возбуждения, подключенный через функциональный преобразователь к другому входу указанного элемента сравнения по току якоря, отличающееся тем, что, с целью повышения плавности изменения тормозного усилия в широком диапазоне скоростей, транзисторный усилитель включен между задатчиком тормозной силы и элементом сравнения сигналов п.о току якоря, причем к элементу сравнения на входеусилителя подключены датчик и задатчик скорости. Источники информации, принятые во внимание при экспертизе I. Электрическая и тепловозная тяга, «Транспорт , № 6, 1972, с. 20-25.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического регулирования тормозной силы электроподвижного состава при электрическом торможении | 1976 |
|
SU1368201A1 |
| Устройство для автоматического регулирования тормозной силы электроподвижного состава | 1980 |
|
SU943024A1 |
| СПОСОБ ПЛАВНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯТОРМОЗНОЙ CHJlbi | 1969 |
|
SU244373A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1986 |
|
SU1463546A1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО | 1969 |
|
SU253110A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТОРМОЗНОЙ СИЛЫ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 1971 |
|
SU290856A1 |
| Устройство для реостатного торможения автономного локомотива | 1982 |
|
SU1008026A1 |
| Устройство для электрического торможения электроподвижного состава переменного тока | 1976 |
|
SU573385A1 |
| Устройство для реостатного торможения автономного локомотива | 1980 |
|
SU895744A1 |
Jf
