Изобретение Относится к области электроизмерительной техники, занимающейся измерением комплексных величин неременного тока и величин, определяемых ими, а в частности к принципам построения цифровых мостов и компенсаторов переменного тока, и направлено на решение задачи повышения их быстродействия.
Известен способ однонаправленного уравновешивания нулевых измерительных цепей неременного тока двумя дискретными регулирующими органами, при котором сигналы на выходах фазочувствительных индикаторов преобразуют в числа или их кодовые эквиваленты, характеризующие отклонение измерительной цени от состояния равновесия но каждому регулируемому параметру, и в соответствии с этими числами производят изменения значений регулируемых параметров.
Однако, так как выходные напряжения фазочувствительных индикаторов в общем случае зависят от отклонений обоих регулируемых параметров цепи от их равновесных значений, при использовании известного способа приходится принимать специальные меры для стабилизации коэффициента усиления в тракте, для линеаризации статических характеристик измерительной цепи, для стабилизации фазовых сдвигов в усилителе сигнала разбаланса и других частях каналов индикации.
По предлагаемому способу быстро уравновешиваются мостовые и компенсационные цепи неременного тока по сигналам, сформированным фазочувствительными индикаторами, при существенной взаимосвязи этих сигналов и не предъявляется специальных требований к стабильности фазовых соотношений и линейности измерительной цепи и индикаторной части благодаря тому, что фазы опорных напряжений фазочувствительных индикаторов устанавливают так, чтобы изменения полярности сигналов на выходах индикаторов при изменении регулируемых параметров от установленных в начале уравновешивания их граничных значений до их значений при равновесии цепи во всех точках диапазона измерения происходили раньше, чем будут достигнуты эти равновесные значения, причем величину каждого регулируемого параметра изменяют только в том случае, если полярность сигнала, на выходе относящегося к этому параметру индикатора соответствует принятому направлению регулировки параметра.
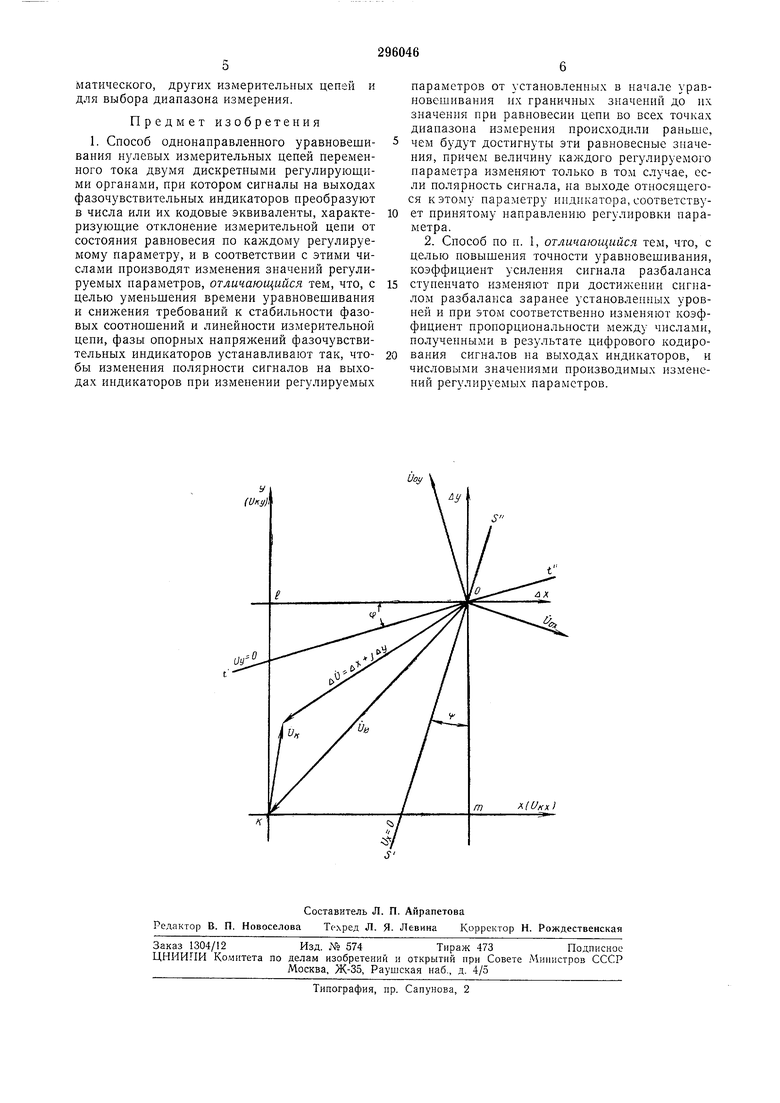
Ио предлагаемому способу повышается также точность уравновешивания, так как коэффициент усиления сигнала разбаланса ступенчато изменяют при достижении сигналом разбаланса заранее установленных уровней и при этом соответственно изменяют коэффициент пропорциональности между числами, полученными в результате цифрового кодирования сигналов на выходах индикаторов, и числовыми значениями производимых значений регулируемых нараметров. На чертеже представлена векторная диаграмма прямоугольно-координатной компенсационной цепи, поясняющая предлагаемый способ уравновешивания. На векторной диаграмме проведены линни уравновешивания ДХ var, Аг/ const О и Дг/ var, Дл: const О, прямые, направления которых совпадают с выбранными направлениями векторов опорных напрялсений ох и i/oy квадратурных фазочувствительных индикаторов, и прямые ss и ft, перпендикулярные направлениям векторов IJox и Uoy соответственно, определяющие геометрические места точек, в которых происходит изменение полярности выходных сигналов индикаторов, и обозначена граничная точка К., которой до начала уравновешивания должны соответствовать значения регулируемых параметров. При однонаправленном уравновешивании конец вектора напряжения разбаланса в процессе уравновешивания не должен выходить за пределы угла lorn, образованного ветвями линий уравновешивания, проходящих через точки равновесия (при этом Ах и Д1/ всегда отрицательны). Фазы опорных напряжений Uox и IJoy устанавливают так, чтобы при измерении в любой точке диапазона измерения при всех возможных фазовых нестабильностях в системе геометрические места точек, в которых происходит изменение полярности выходных сигналов фазочувствительных индикаторов, т. е. нрямые ss и ti находились внутри угла lorn. При такой установке фаз опорных напряжений вся область возможных значений Дл: и Дг/ разбивается на три области: область, заключенную внутри угла tos, в которой знаки сигналов на выходах индикаторов совпадают со знаками отклонений регулируемых параметров от нх равновесных значений; область, заключенную внутри угла lot, в которой нарушается соответствие знаков Дг/ и выходного сигнала индикатора, определяющего регулировку у, т. е. область возможных ошибок при регулировке параметра у; область, заключенную внутри угла som, в которой нарушается соответствие знаков Дл: и выходного сигнала индикатора, определяющего регулировку х, т. е. область возможных ошибок при регулировке параметра х. Регулировку каждого параметра производят лишь вне области возможных ошибок по этому параметру. А так как при однонаправленном уравновешивании знаки отклонений от состояния равновесия до начала каждого такта уравновешивания всегда постоянны и известны, то о попадании в область возможных ошибок по параметру свидетельствует появление на выходе соответствующего индикатора сигнала с полярностью, противоположной заранее установленной полярности (в расс.матриваемом случае появление положительного сигнала). При указанной установке фаз на каждом такте уравновешивания производят цифровое кодирование (измерение) сигналов на выходах индикаторов, у которых эти сигналы имеют установленную полярность, и в соответствии с полученными числовыми (кодовыми) значениями устанавливают значения регулируемых величин, а точнее число, полученное после измерения напряжения на выходе индикатора, разделенное на установленное значение коэффициента, который связывает это напряжение с отклонением регулируемого параметра, принимают за значение отклонения регулируемого параметра и на это число увеличивают значение регулируемого параметра. Для исключения возможности попадания в зоны возможных ошибок из-за погрешности измерения выходных сигналов индикаторов и отклонения истинного значения коэффициента связи от установленного значения значение коэффициента связи выбирают таким образом, чтобы на каждом такте уравновешивания производились несколько меньшие по величине приращения составляющих компенсирующего напряжения, чем это делалось бы при отсутствии указанных погрешностей и отклонений. Регулировки прекращаются либо через заранее установленное число периодов уравновешивания, либо после попадания напряжения разбаланса в пределы зоны нечувствительности. Допустимые фазовые нестабильности в системе определяются величинами углов ф и . Необходимо, чтобы во всех случаях линии to и so не выходили за пределы угла /от. iiaпример, при ф| IT}) колебания фазовых сдвигов Б индикаторной части от установленного начального значения не должны превышать ± |ф|. При использовании способа прямого уравновешивания обычно по окончании регулировки каждого разряда регулируемой величины производят изменение коэффициента усиления усилителя сигнала разбаланса в 10 раз. В рассматриваемом способе изменение коэффициента усиления не связывается непосредственно с окончанием регулировки того или иного разряда регулируемых величин, а производится ступенчато при достижении модулем напряжения (тока) разбаланса измерительной цепи заранее установленных уровней. При этом соответственно изменяется и коэффициент связи между числами, полученными в результате кодирования сигналов на выходах индикаторов и величинами производимых приращений регулируемых параметров. Рассмотренный способ уравновешивания проиллюстрирован на примере уравновешивания прямоугольно-координатной компенсационной цепи внутри одного диапазона измерения, но он одинаково применим и для уравномагического, других измерительных цепей и для выбора диапазона измерения.
Предмет изобретения
1. Способ однонаправленного уравновешивания нулевых измерительных цепей переменного тока двумя дискретными регулирующими органами, при котором сигналы на выходах фазочувствительных индикаторов преобразуют в числа или их кодовые эквиваленты, характеризующие отклонение измерительной цени от состояния равновесия но каждому регулируемому параметру, и в соответствии с этими числами производят изменения значений регулируемых параметров, отличающийся тем, что, с целью уменьшения времени уравновешивания и снижения требований к стабильности фазовых соотношений и линейности измерительной цепи, фазы опорных напряжений фазочувствительных индикаторов устанавливают так, чтобы изменения полярности сигналов на выходах индикаторов при изменении регулируемых
параметров от установленных в начале уравновешивания их граничных значений до их значения при равновесии цепи во всех точках диапазона измерения происходили раньше, чем будут достигнуты эти равновесные зпачения, причем величину каждого регулируемого параметра изменяют только в том случае, если полярность сигнала, на выходе относящегося к этому параметру индикатора, соответствует принятому направлению регулировки параметра.
2. Снособ по п. 1, отличающийся тем, что, с целью повышения точности уравновешивания, коэффициент усиления сигнала разбаланса
ступенчато изменяют при достиже ши сигналом разбаланса заранее установленных уровней и при этом соответственно изменяют коэффициент пропорциональности мелчду числами, полученными в результате цифрового кодирования сигналов на выходах индикаторов, и числовыми значениями производимых изменений регулируемых нараметров.