Изобретение относится к электроизмерительной технике, а именно к измерению параметров комплексных величин с помощью нулевых (уравновешенных) измерительных цепей переменного тока, и может быть применено при построении цифровых приборов для автоматического измерения, составляющих комплексных сопротивлений, напряжений и других электрических величин или неэлектрических величин, однозначно связанных с электрическими.
Известны способы уравновешивания нулевых измерительных цепей переменного тока, в которых переключение образцовых элементов уравновешивающих органов производится по знакам сигналов, сформированных двумя фазочувствительными нуль-индикаторами (т.е. на основе анализа фазы сигнёша разбаланса мостовой цепи) , причем, с целью улучшения сходимости, производится регулиров ка лишь того параметра, знак отклонения которого от состояния равновесия соответствует знаку сигналов на выходах фазочувствительных нульиндикаторов til
Недостаток способов заключается в том, что они работоспособны при углах паразитных фазовых сдвигов (т.е. углах между опорными напряжениями фазовых детекторов и линиями уравновешивания), что ограничивает их применение только в тех измерительных цепях,паразитные Фазовы сдвиги в которых меньше максимально допустимых.
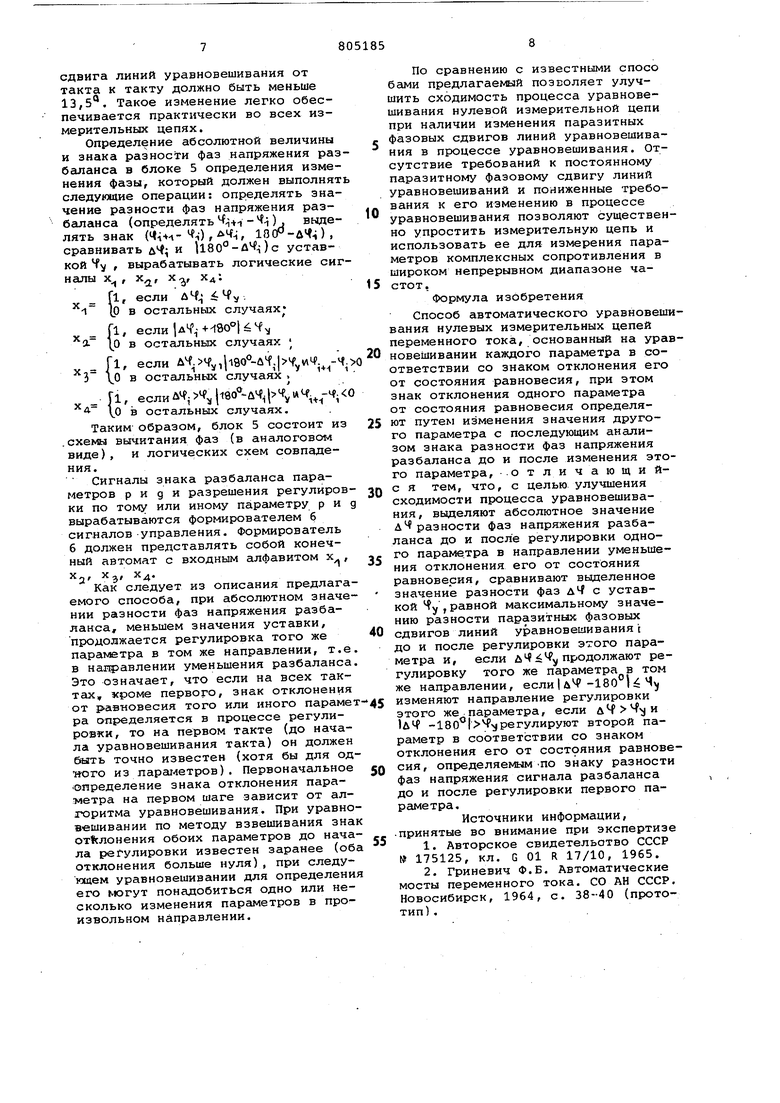
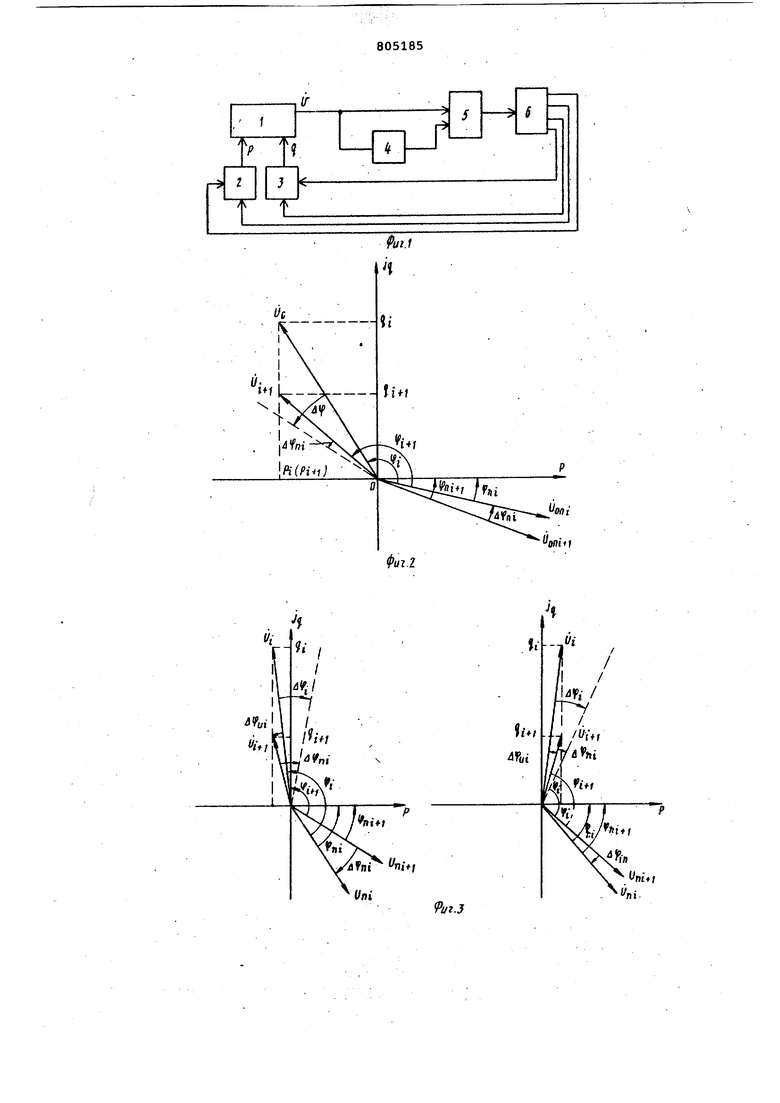
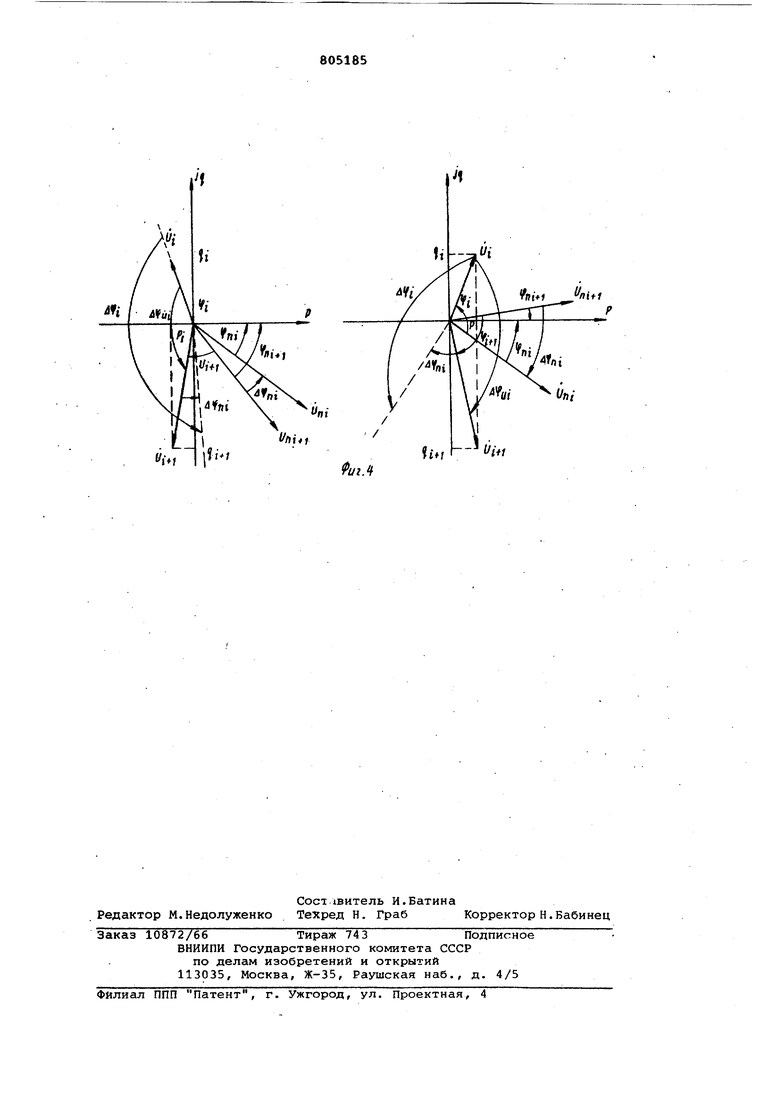
Наиболее близким к предлагаемому является способ автоматического урановешивания нулевых, измерительных цепей переменного тока, основанный на уравновешивании каждого параметра в соответствий со знаком отклонения его от состояния равновесия. Согласно этому способу, знак отклонения одного параметра от состояния равновесия определяют путем иЭмененил (модуляции) другого параметра с последующим анализом знака разности фаз напряжения разбаланса до и после изменения этого параметра. При таком способе на сходимость процесса уравновешивания не влияет постоянный паразитный фазовый сдвиг между линиями уравновешивания и опоным напрялением 2. Напряжения разбаланса станет равным Uj, а его фаза i... где Ч ()- паразитный фазовый сдвиг между Uoji и Линией в конце . 1-го такта. Разлагая (2) в ряд Тейлора и вычитая (1) из (2), получают . и V-V-4 -Ч . Ш1 ni+t W где 6 3. При выполнении условия да ч. о Я/шл гдeдЧи , Чич |И в известном знаке gyj (известном направлении, регулировки) , видно из (3), по знаку разности фаз н пряжения разбаланса до и после регулировки параметра g можно однозначно определить- знак отклонения от состояния равновесия параметра. Однако если условие (4) нарушается знак разности фаз H.-i - будет определяться aHaKOM-4ri :j нп и может не соответствобать знаку . Наверное определение знака р приве дут при регулировании его на И-1-м такте к ложному шагу, что ухудшит димрсть процесса уравновешивания. На фиг. 3 и фиг. 4 показашл слу чаи, когда разным знаком р- соотве ствует один И тот жезнак и одно и ТО; же значение - и, следова тельно, знак |ц.- Ч не соответств ет знаку рц . Несоответствие, знака разности фазы напряжения разбаланса знаку о клонения от равновесия перерегулиров.авшегося параметра, как видно и (4) может быть, когда отклонение о состояния равновесия пёререгулировавшегося параметра существенно ме ше отклонения по регулировавшемуся параметру., ; Как видно из фиг.. 3 и фиг. 4 аб сголютнЕ1я величина разности фаз напр1Яйсения разбаланса д% «( , при том близка к нулю (фиг. 3) либо к 180(фиг, 4), причем разкость фаз напряжения разбаланса, близкая к. нулю, ооответствует случай, когда знак отк юнения регулиро:| авшегося-параьютра после регули ровки остался таким же, как до jpeгулИровки (на фиг. 3 g, и gf т.е перерегулирования не произошло, аразность фаз сигнала разбаланса, близкая к 180° соответств ет случаю, когда произошло перерег лйрование регулировавшегося параметра, т.е. знак отклонения его от равновесия в конце регулировки про тивоположен знаку отклонения регул ровавшегося параметра до его регулировки (на фиг. 4 , а 0). Следовательно, при разности фаз напряжения разбаланса, близкой к нулю или 180, точно известен знак регулировавшегося параметра, определяемый абсолютной величиной л Ч разности фаз напряжения разбаланса до и после регулировки этого параметра, а в остальных случаях точно известен знак перерегулирования.параметра, определяемый знаком разности фаз напряжения разбаланса. Таким образом, продолжая регулировку регулировавшегося- параметра в соответствии с абсолютной величи.ной разности фаздЧ напряжения разбаланса, если й близка к или к 180, или в противном случае, переходя на регулировку второго (не регулировавшегося) параметра, в соответствии со знаком разности фазы можно улучшить сходимость процесса уравновешивания, так как теперь, поскольку всегда используется дос товерная информация о знаке отклонения от равновесия одного из параметров, исключаются ложные шаги. Анализ абсолютной величины разности фазы напряжения разбаланса на каждом шаге производится путем сравнения дЧи (I80 -a4j, с уставкой значение которой выбирается таким образом, чтобы удовлетворялось условиеСу д{/„„. гдедЧд д максимально возможное изменение паразитного фазового сдвига Чц от такта к такту. При выполнении этого условия информация о знаке отклонения от равновесия перерегулировавшегося параметра всегда будет однозначно определяться знаком (4-i+.i-4i). Максимальное значение разности паразитных фазовых сдвиговдЧ в системе ограничено минимальным значением истинной разности фаз напряжений разбаланса W гдеАМц у{- то минимальное значение истинной разности фаз напряжения разбаланса, вызванное изменением параметра на величину шага, при котором должен быть точно определен знак не регулировавшегося параметра. ЗначениедЧ „зависит от величины шага (т.е. от алгоритма уравт новешивания) и от диапазона измеряемых параметров, и составляет, например, для уравновешивания по метовзвешивания при p..,f9у«г уИ дпл jtnov I мюх wax тц . (т.е. при уравновешиваний шагами, равными половине максимального возможного на данном ша-, ге отклонения параметра от равновесия) 27. Следовательно, изменение максимального паразитного фазового
Недостаток спЬсоба заключается в том, что на сходимость процесса уравновешивания влияет параэитйый фазовый сдвиг, значение которого меняется в процессе уравновешивания (от такта к такту). Из-за.наличия этого сдвига может возникнуть ситуация, когда изменение фазы сигнала разбаланса, вызванное изменением одного параметра и определяющее знак
разбаланса по второму параметру, окарсется меньше значения разиости паразитных фазовых сдвигов линий уравновешивания до и после регулировки первого параметра (это может случиться, если разбаланс по параметру, знак которого определяется, существенно меньше разбаланса по параметру, знак которого изменяется). При этом знак разности фаз напряжения разбаланса до и после регулировки одного параметра может оказаться не соответствукхцим знаку отклонения второго (нерегулируемого) параметра от состояния равновесия. Это приве- . дет к ложному шагу в сторону увеличения разбаланса по этому параметру и, следовательно, ухудшит сходимоЫ ь процесса уравновешивания (при урав,новешивании методо м взвешивания процесс вообще может не сойтись).
Цель предлагаемого способа - получение достоверной информации о знаке отклонения от равновесия одиого из параметров за счет улу оиения сходимости нулевой измерительной цепи переменного тока. Поставленная цель достигается тем, способе уравновешивания нулевых измерительных цепей переменного тока, основанном на уравновешивании каждого параметра в соответствии со знаком отклонения &то от состояния равновесия, при этом знак отклонения одного параметра от состояния равновесия определяют путем изменения значения другого параметра с последующим ангишзом знака разности фаз напряжения разбаланса до и после изменения этого паракютра, выделяют абсолютное . значение дЧ разности фаз напряжения разбаланса до и после регулировки одного параметра в направлении уменьшения отклонения его от состояния равновесия, сравнивают выделенное значение разности фаз А Ч с уставкойЛ , равной максимальному звачению разности паразитных фазовьк сдвигов линий V уравновш1шваиия до и после регулировки этого параметра и, если , продолжают регулировку того же параметра в . томуе направлении, если 1л Ч -180 U. Чу , изменяют направление рёгулировки этого же параметра, а если -180°| Ч2, регулируют второй параметр, в сортветствии со знаком отклонения его от состояния рав-.
новесия, определяемым по знаку разности фаз напряжения сигнала разбаланса до и после регулировки первого параметра.
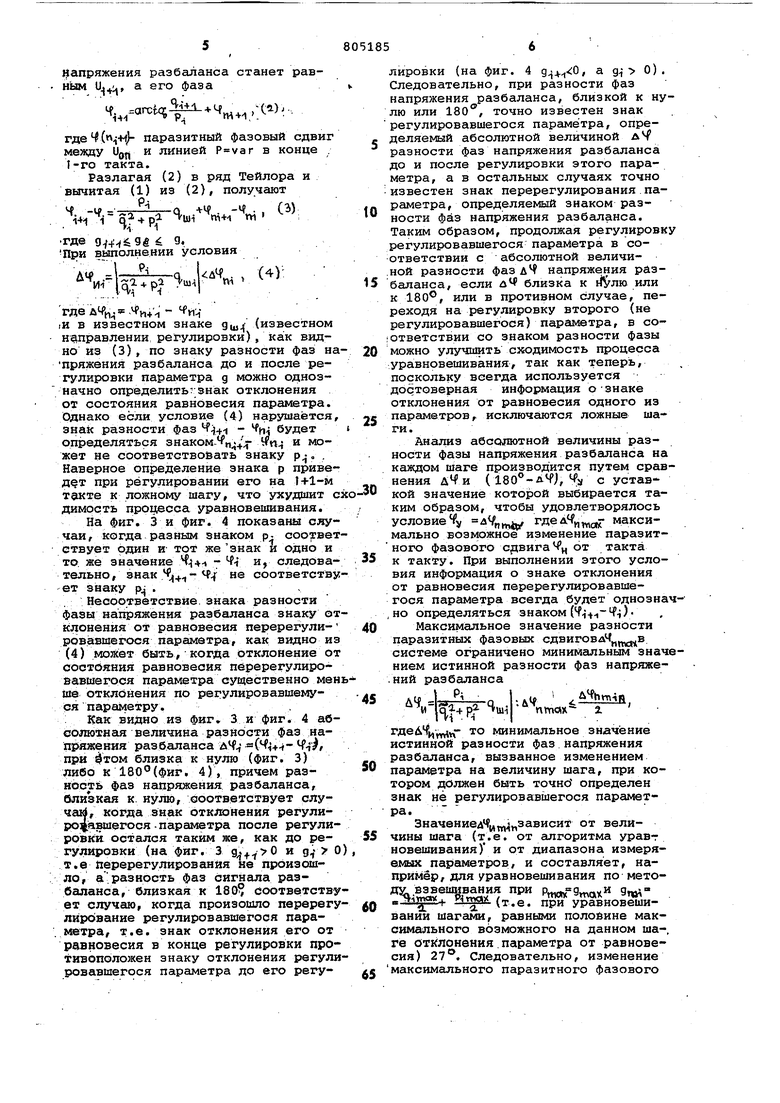
На фиг. 1 приведена блок-схема устройства, реализующая предлагае № й способ; на фиг. 2-4 - векторные диагра1 1к&1.
1Измерительная цепь 1 уравновешивается путем поочередной регулировки параметров р и g с помощью уравнове0шивающих органов 2 и 3 соответственно. Коммутация параметров р и g выполняется уравновешивающими органами
2и 3 в соответствии с методом уравновешивания (взвешивание, следящее
5 уравновешивание и т.д.) на основании сигнгшов о знаке разбаланса по
I соответствувзщёму посту па-. ющих на одни входы органов 2 и 3. |На другие входа уравновешивающих ор0ганов 2 и 3 поступают сигналы, заI прещёцощие или раэрешаюоще коиенутацшо соотватствуш го параметра на сданном тексте. Напряжение разбаланса поступает на входы блока 4 запоминания фазы, где запо11шиается
5 фаза до начала коъмутации пареинетра, и один из входов блока 5 ощределения разности фаз, друхюй вход которого соединен с выходом блока 4 запоминания фазы. Сигнал, пропор0ционгигьный разности фаз напряжения разбаланса до и после регулировки паргоютра, поступают на вход фо{ шрователя 6 сигигшов управления. Выхода) формирователя 6 сигналов управ5ления соединены со входг ми уравновешивающих органов 2 и 3. .
Фаза вектора напряжения разбаланса для измерительной цепи с прямы ми линиями уравиов оивания и урав0новешиванием 1Ю активной (р) и pekKтивной (g) составляющим в начале 1-го такта уравновешивания равна (фиг. 2)
r4iV 5- rt-i
5
где gj ; р - разбаланс по параметру р и g в начале I-го такта;
Чу, - паразитный фазошлй сдвиг между вектором опорного напряжения (ion ( напряжением питания измерительной цепи) и одной из линий уравновевшвания (на фиг. 2 линией P«var).
Если в начале 1-го такта известен знак отклонения от равновесия параметра g (на фиг. 2 д 0), то
, фо{ 4ирователь управления
«О вьщает на выход соответствующий сигнал/ одновременно на другом вы:зоде появляется сигнал, разрёшаю;щий регулирование.параметра g.
После регулировки параметра g н
65 величину шага Ош ,9 вектор сдвига линий уравновешивания от такта к такту должно быть меньше 13,5. Такое изменение легко обеспечивается практически во всех измерительных цепях. Определение абсолютной величины и знака разности фаз напряжения раз баланса в блоке 5 определения изменения фазы, который должен выполнят следующие операции: определять значение разности фаз напряжения разбгшанса (определять -i+-i - i ) , выделять знак (4iM- i) f f-i, 18(r-u4i), сравнивать дЧ- и Il80°-fl i)c уставкой Чу , вырабатывать логические сиг налы х если ДЧ- Чч g м V В остальных случаяхj 1, если1д ,-+ 90°иЧх, 3- 0 в остальных случаях 1, если H fvib90°- f, 3 0 в остальных случаях . 1, еслий,,,-Ч. 0 в остальных случаях. Таким образом, блок 5 состоит из .схемы вычитания фаз (в аналогово1л виде), и логических схем совпадения. Сигналы знака разбаланса параметров р и g и разрешения регулиров ки по тому или иному параметру р и вырабатываются формирователем 6 сигналов управления. Формирователь 6 должен представлять собой конечный автомат с входным алфавитом х , 3 4 Как следует из описания предлага емого способа, при абсолютном значе нии разности фаз напряжения разбаланса, меньшем значения уставки, продолжается регулировка того же параметра в том же направлении, т.е в направлении уменьшения разбаланса Это означает, что если на всех тактах, кроме первого, знак отклонения от р.авновесия того или иного параме ра определяется в процессе регулировки, то на первом такте (до начала уравновешивания такта) он должен быть точно известен (хотя бы для од ного из napaivieTpoB) . Первоначальное определение знака отклонения параметра на первом шаге зависит от алгоритма уравновешивания. При уравно вешивании по методу взвешивания зна от1слонения обоих параметров до нача ла регулировки известен заранее (об отклонения больше нуля), при следующем уравновешивании для определени его югyт понгщобиться одно или несколько изменения параметров в произвольном направлении. По сравнению с известными спосо бс1ми предлагаемый позволяет улучшить сходимость процесса уравновешивания нулевой измерительной цепи при наличии изменения паразитных фазовых сдвигов линий уравновешивания в процессе уравновешивания. Отсутствие требований к постоянному паразитному фазовому сдвигу линий уравновешиваний и пониженные требования к его изменению в процессе уравновешивания позволяют существенно упростить измерительную цепь и использовать ее для измерения параметров комплексных сопротивления в широком непрерывном диапазоне частот. Формула изобретения Способ автоматического уравновешивания нулевых измерительных цепей переменного тока, основанный на уравновешивании каждого параметра в соответствии со знаком отклонения его от состояния равновесия, при этом знак отклонения одного параметра от состояния равновесия определяют путем изменения значения другого параметра с последующим анализом знака разности фаз напряжения разбаланса до и после изменения этого параметра, .о т ли ч а ю щ и йс я тем, что, с целью улучшения сходимости процесса уравновешивания, выделяют абсолютное значение Д разности фаз напряжения разбаланса до и после регулировки одного параметра в направлении уменьшения отклонения его от состояния равновесия, сравнивают выделенное значение разности фаз д с уставкой Чу , равной максимальному значению разности паразитных фазовых сдвигов линий уравновешивания до и после регулировки этого параметра и, если продолжают регулировку того же параметра в том же направлении, если | лЧ -180° Ч изменяют направление регулировки этого же параметра, если iuMP М (регулируют второй параметр в соответствии со знаком отклонения его от сост9яния равновесия, определяемым .по знаку разности фаз напряжения сигнала разбаланса до и после регулировки первого параметра. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 175125, кл. G 01 R 17/10, 1965. 2.Гриневич Ф.Б. Автоматические мосты переменного тока. СО АН СССР. Новосибирск, 1964, с. 38-4О (прототип) .
I
Ос

Риг.З
