Изобретение относится к области радиотехники и может быть использовано в вычислительных устройствах, предназначенных для навигационных вычислений при сопряжении автономных навигационных приборов с гиперболическими навигационными системами.
Известны аналоговые счислители координат, работающие от автономных датчиков пути и курса, которые на выходе дают прямоугольные координаты подвижного объекта.
При совместном использовании таких счислителей с бортовой аппаратурой разностнодальномерных радионавигационных систем (РПС) требуется преобразование прямоугольных координат в гиперболические.
С целью определения гиперболических координат с высокой надежностью по входным данным в виде курса подвижного объекта и пройденного им пути предлагаемый аналоговый счислитель имеет несколько (по числу станций радионавигационной системы) индентичных каналов, каждый из которых содержит дифференциал, связывающий входной сигнал курса с ручкой и шкалой установки начального курса и с одним из входов синусного и косинусного механизмов, па вторые входы которых поданы сигналы, соответствующие пройденному объектом пути; суммирующий редуктор со входом, который может быть подключен либо к выходу косинусного механизма, либо к ручке начальной установки пути, и с выходом, соединенным со щкалой установки начального пути и с одним из входов редуктора с переменным коэффициентом передачи. На другой вход этого редуктора подан сигнал с выхода синусного механизма. Выход редуктора соединен с одним из входов дифференциала. Выходы суммирующих редукторов всех каналов соединены собой через дифференциалы, имеющие шкалы и ручки начальной установки гиперболических координат.
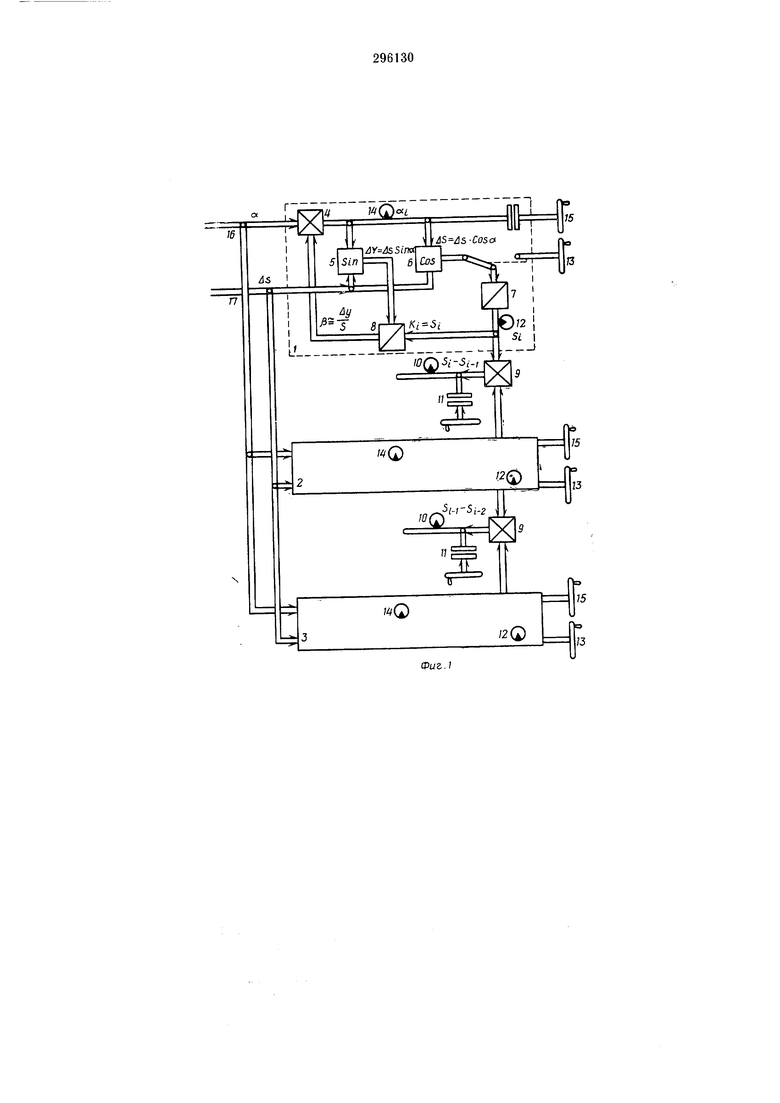
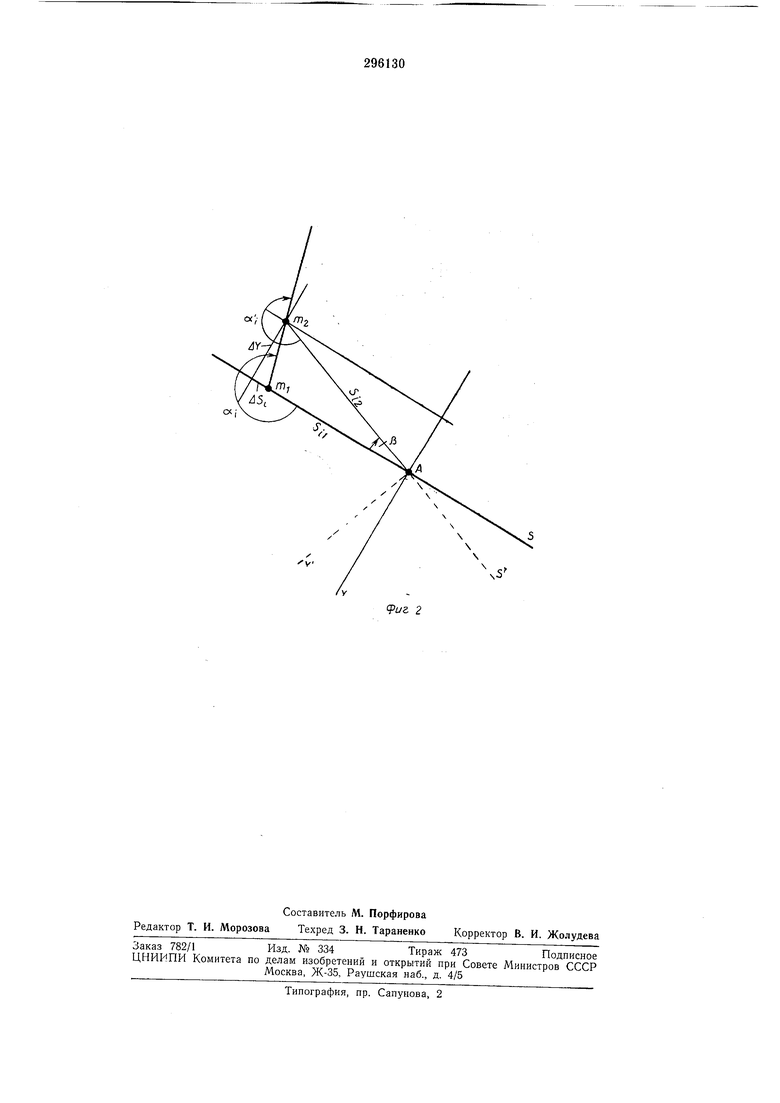
Па фиг. I изображена схема предлагаемого аналогового счислителя из трех каналов; на фиг. 2 - принцип получения координат аналоговым счнслителем в прямоугольной и гиперболической системах.
Аналоговый счислитель содержит три идентичных канала 1, 2 и 3, каждый из которых состоит из дифференциала 4, синусного механизма 5, косинусного механизма 6, суммирующего редуктора 7, редуктора 8 с переменным коэффициентом передачи.
Выходы суммирующих редукторов всех каналов соединены между собой через дифференциалы 9, имеющие шкалы 10 и ручки 11 начальной установки гиперболических координат. Па выходе суммирующего редуктора имеется шкала 12 установки начального пути.
Вход суммирующего редуктора 7 может быть подключен к выходу косинусного механизма 6, либо к ручке 13 начальной установки нути (начальных значений расстояний до станций РНС).
Дифференциал 4 соединен со входами синусного 5 и косинусного 6 механизмов, со шкалой J4 и ручкой 15 установки начального курсового угла.
Каналы 1, 2 к 3 работают идентично. Каждый канал вычисляет расстояние до одной из трех станций РНС и в каждый из них вводится пройденный нодвижными объектом нуть н значение курса в виде углов новорота входных валов.
Входной сигнал курса, снимаемый обычно с гиросконнческого датчика курса в виде курсового угла а нодвижного объекта, ностунает на вход /6. Сигнал, соответствующий прираHiCTjino As нройденного объектом нути, от датчика пути поступает на вход 17.
В начальной точке /HI маршрута на шкале 14 ручкой 15 вводится значение курсового угла К; (относительно направления на станцию А), а ручкой 13 на шкале 12 - начальное значение 5п расстояния до станции Л.
Для получения гиперболических координат иеобходимо иметь действительное расстояние до станцин Л, т. е. 5,-2.
Координата S равна 5;2 на шкале счислитсля нрямоугольных координат, если в процессе дви/кения непрерывно поворачивать систему координат SY и но прибытии в точку ni2 развернуть ее на угол р. Для этого необходимо непрерывно вычислять угол |3 и вводить его Г) качестве коррекции в курсовой угол а,-, при этом а a.i-(3.
После установки начальиых значений сс; и 5 и после начала движения в узел поступают приращения иути Д5 от датчика иути и значения курсового утла от гирокурсоуказателя.
На выходе синусного механизма 5 нолучают ДУ А5-81па;.
На выходе косинусиого механизма 6 имеют AS A5-cosci,:.
Редуктор 7 суммирует приращение распСТОЯПИЙ 5; 5ji + 2A5.
Результат суммирования постунает на редуктор 8, в котором устанавливает коэффициент передачи . На выходе редуктора
8 получают (.
i
Полученное значение угла р при помощи диффереициала 4 вычитается (складывается) из угла «j, нри этом непрерывно осун ествяется разворот снстемы координат SY на угол (j. Таким образом, на выходе канала 1 на шкале 12 ненрерывно нолучают действительное расстояние до станции А.
Каналы 2 н 3, действуя аналогично, вырабатывают расстояния 8ц и 5,2 до второй и третьей передающих станций РНС.
Выходные данные с каналов поступают на дифференциалы 9, которые вырабатывают разности расс ояпий (гииерболические коордииаты) 5i - Sn; ол-Si2Полученные данные гиперболических коордииат иостуиают па шкалы 10.
Предмет изобретения
Аналоговый счислитель координат для совместного иснользования бортовой аппаратуры разностно-дальномерных радионавигационных систем с автономными средствами навигации, включающий в себя сииусный и косинусный механизмы, суммирующий редуктор, ручку и шкалу нача.льиой установки курса, отличающийся тем, что, с целью оиределения гиперболических коордииат с высокой надежностью ио входным данным курса нодвилшого объекта и нройдеиного им нути, входные сигналы иоданы на несколько, по числу станций радиоиавигационно системы, идеитичных каналов, каждый из которых содержит дифференциал, связывающий входной сигнал курса с ручкой и шкалой установки начальиого курса и с одним из входов синусного и косинусного
. механизмов, на вчорые входы которых поданы непосредственно сигналы, соответствующие нройденному объектом пути, суммирующий редуктор со входом, который может быть подключен либо к выходу косииусного механизс ма, либо к ручке начальной установки пути, и с выходом, соединенным со шкалой установки начального иути и с одним из входов редуктора с неремениым коэффициентом передачи, на другой вход которого подан сиг„ нал с выхода синусного механизма, а выход редуктора соединен с одним из входов упомянутого дифференциала, причем выходы суммирующих редукторов всех каналов соединены между собой через дифференциалы, имеющие шкалы и ручки иачальной установки гиперболических координат.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| Навигационный счислитель координат | 1989 |
|
SU1820218A1 |
| Устройство для измерения временных интервалов | 1989 |
|
SU1674030A1 |
| Устройство для измерения параметров ветра | 1980 |
|
SU932406A1 |
| Интегрирующее устройство для определения диффракционного распределения амплитуды и фазы | 1958 |
|
SU124146A1 |
| УСТРОЙСТВО РАДИАЛЬНО-КРУГОВОЙ РАЗВЕРТКИ ИНДИКАТОРОВ КРУГОВОГО ОБЗОРА СУДОВЫХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 1980 |
|
SU1840930A1 |
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2020 |
|
RU2759515C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ BtTPA С БОРТА ДВИЖУЩЕГОСЯ КОРАБЛЯ | 1971 |
|
SU296036A1 |
| Устройство для управления ловом рыбы | 1974 |
|
SU598591A1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| Устройство для измерения и регистрации средней скорости и направления ветра | 1960 |
|
SU140249A1 |