Изобретение относится к измерительной технике и предназначено для использо- вания в бортовых устройствах для измерения временных интервалов между радиоимпульсами в радиолокационной и радионавигационной технике, в частности в импульсно-фазовых и фазовых разностно- дальномерных радионавигационных системах (Р НС).
Цель изобретения - повышение точности измерений временных интервалов путем формирования и запоминания сигнала компенсации систематической погрешности, обусловленной условиями распространения радисволн.
На фиг.1 изображена блок-схема предложенного устройства для измерения временных интервалов: на фиг.2 - блок-схема
формирования счислимой разности фаз: на фиг.З - блок-схема блока формирования уточненного значения временного интервала; на фиг.4 - блок-схема вычислителя координат; на фиг.5 - блок-схема преобразователя координат; на фиг.6 - временные диаграммы сигналов в различных точках блок-схемы предложенного устройства.
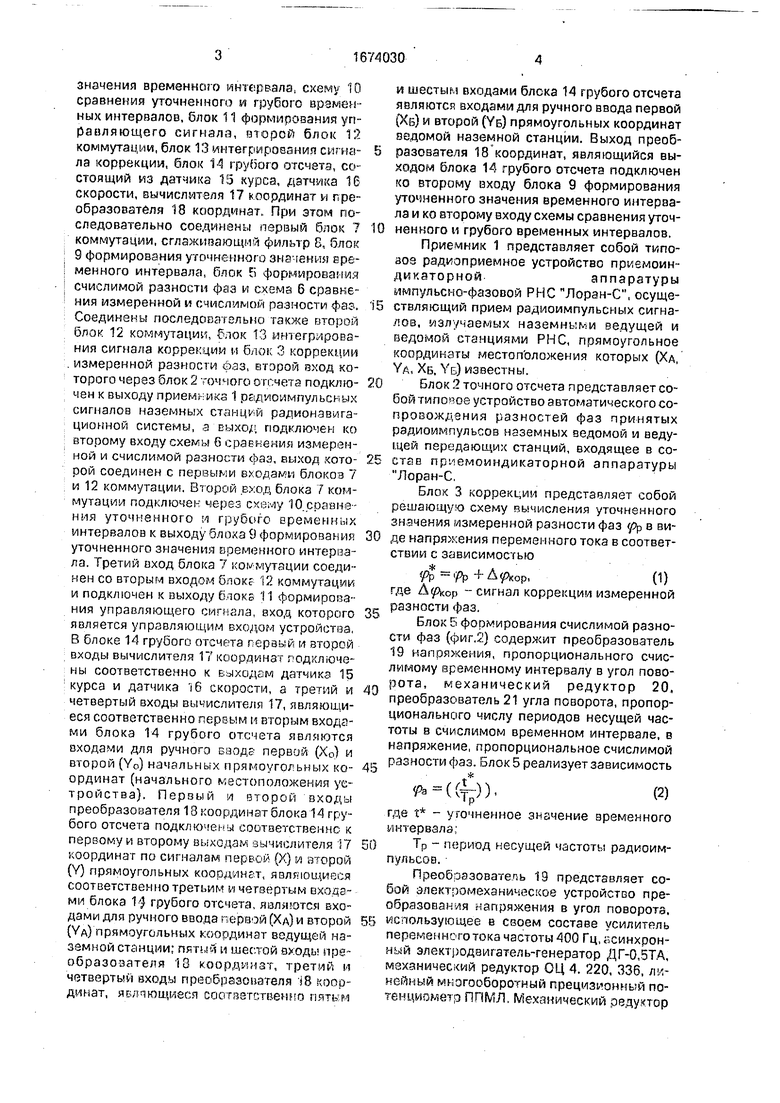
Устройство (фиг. 1) содержит приемник радиоимпульсных сигналов наземных станций радионавигационной системы, блок 2 точного отсчета, блок 3 коррекции измеренной разности фаз, вычислитель 4 поправки, состоящий из блока 5 формирования счислимой разности фаз, Схемы 6 сравнения измеренной и счислимой разности фаз, первый блок 7 коммутации, сглаживающий фильтр 8. блок 9 формирования уточненного
О vj
О СО
о
значения временного интервала, схему 10 сравнения уточненного и грубого временных интервалов, блок 11 формирования управляющего сигнала, второй блок 12 коммутации, блок 13 интегрирования сигнала коррекции, блок 14 грубого отсчета, состоящий из датчика 15 курса, датчика 16 скорости, вычислителя 17 координат и преобразователя 18 координат. При этом последовательно соединены первый блок 7 коммутации, сглаживающий фильтр 8, блок 9 формирования уточненного значения временного интервала, блок 5 формирования счислимой разности фаз и схема 6 сравнения измеренной и счислимой разности фаз. Соединены последовательно также второй блок 12 коммутации, блок 13 интегрирования сигнала коррекции и блок 3 коррекции . измеренной разности фаз, второй вход которого через блок 2 точного отсчета подключен к выходу приемника 1 радисимпульсных сигналов наземных станций радионавигационной системы, а выход подключен ко второму входу схемы 6 сравнения измеренной и счислимой разности фаз, выход которой соединен с первыми входами блоков 7 и 12 коммутации. Второй вход блока 7 коммутации подключен через схему 10 сравнения уточненного и грубого временных интервалов к выходу блока 9 формирования уточненного значения временного интервала. Третий вход блока 7 коммутации соединен со вторым входом блока 12 коммутации и подключен к выходу блока 11 формирования управляющего сигнала, вход которого является управляющим входом устройства. В блоке 14 грубого отсчета первый и второй входы вычислителя 17 координат подключены соответственно к выходам датчика 15 курса и датчика 16 скорости, а третий и четвертый входы вычислителя 17, являющиеся соответственно первым и вторым входами блока 14 грубого отсчета являются входами для ручного ввода первой (Х0) и второй (Yo) начальных прямоугольных координат (начального местоположения устройства). Первый и второй входы преобразователя 18 координат блока 14 грубого отсчета подключены соответственно к первому и второму выходам вычислителя 17 координат по сигналам первой (X) и пторой (Y) прямоугольных координат, являющиеся соответственно третьим и четвертым входами блока 14 грубого отсчета, являются входами для ручного ввода первой (Хд) и второй (Уд) прямоугольных координат ведущей наземной станции; пятый и шестой входы преобразователя 13 координат, третий и четвертый входы преобразователя (8 копр- динат, являющиеся соответственго пятым
и шестым входами блока 14 грубого отсчета являются входами для ручного ввода первой (ХБ) и второй (YB) прямоугольных координат ведомой наземной станции. Выход преобразователя 18 координат, являющийся выходом блока 14 грубого отсчета подключен ко второму входу блока 9 формирования уточненного значения временного интервала и ко второму входу схемы сравнения уточненного и грубого временных интервалов.
Приемник 1 представляет собой типовое радиоприемное устройство приемоин- дикаторнойаппаратуры
импульсно-фазовой РНС Лоран-С, осуществляющий прием радиоимпульсных сигналов, излучаемых наземными ведущей и ведомой станциями РНС, прямоугольное координаты местоположения которых (Хд, YA, Хь. YB) известны.
Блок 2 точного отсчета представляет собой типопое устройство автоматического со- провождения разностей фаз принятых радиоимпульсов наземных ведомой и ведущей передающих станций, входящее в состав приемоиндикаторной аппаратуры Лоран-С.
Блок 3 коррекции представляет собой решающую схему вычисления уточненного значения измеренной разности фаз /)р в виде напряжения переменного тока в соответствии с зависимостью
У$ -№ + Дркор,(1)
где - сигнал коррекции измеренной
разности фаз.
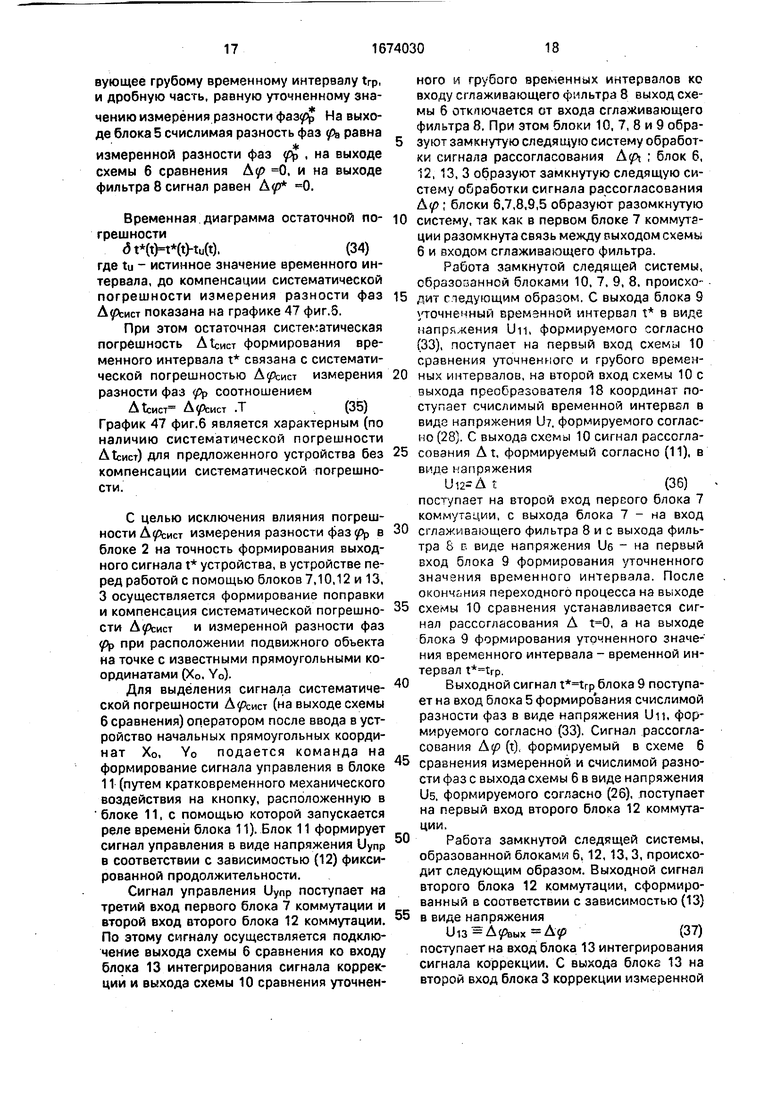
Блок 5 формирования счислимой разности фаз (фиг.2) содержит преобразователь 19 напряжения, пропорционального счис- лимому временному интервалу в угол поворота, механический редуктор 20, преобразователь 21 угла поворота, пропорционального числу периодов несущей частоты в счислимом временном интервале, в напряжение, пропорциональное счислимой
разности фаз. Блок 5 реализует зависимость
Ґ((Ј)).(2)
где t - уточненное значение временного интервала;
Тр - период несущей частоты радиоимпульсов.
Преобразователь 19 представляет собой электромеханическое устройство преобразования напряжения в угол поворота,
использующее в своем составе усилитель переменноготока частоты 400 Гц, асинхронный электродвигатель-генератор ДГ-0,5ТА, механический редуктор ОЦ 4. 220, 336, линейный многооборотный прецизионный потенциометр ППМЛ. Механический редуктор
20 типа ОЦ4.220.366. Преобразователь 21 представляет собой линейный однооборсл- ный прецизионный потенциометр типа ПЛ 1. Вход преобразователя 19 является входом блока 5 и подключен к выходу блока 9, вход редуктора 20 механически подключен к выходу преобразователя 19. а выход подключен ко входу преобразователя 21. Выход преобразователя 21 является выходом блока 5.
Схема б сравнения измеренной и счис- лимой разности фаз представляет собой решающую схему формирования разности
напряжений сигналов (fa (t) И ра (t) в момент времени t.
Блок 7 коммутации представляет собой электромеханическое реле типа РЭС-15 и моделирует в виде напряжения переменного тока функциональную зависимость
Г ,
ДрвыхV
(Atnpn Uynp-0,(3)
где Дуз - значение поправки к счислимому значению разности фаз a a;
At- значение поправки к счислимому значению временного интервала trp;
Дувых выходной сигнал блока коммутации:
Uynp - напряжение управления,.подаваемое на третий вход блока 7 коммутации;
Кпит - напряжение источника питания (не показан).
Сглаживающий фильтр 8 представляет собой фильтр нижних частот, реализованный на R, С элементах и имеющий передаточную функцию
к (р)ТфУ+Тгде Тф - постоянная времени сглаживающего фильтра;
Р - оператор преобразования Лапласа.
Блок 9 формирования уточненного значения временного интервала представляет собой решающую схему формирования уточненного значения временного интервала t.
Блок 9 формирования уточненного значения временного интервала (фиг.З) содержит блок 22 формирования вспомогательных сигналов рассогласования, блок 23.1 формирования первого сигнала управления коммутатором, блок 23.2 формирования второго сигнала управления коммутатором, коммутатор 24, блок 25 отработки сигнала рассогласования, преобразователь 26 напряжения, пропорционального грубому временному интервалу, в угол поворота, блок 27 уточненного временного интервала, преобразователь 28 угла поворота,
пропорционального уточненному временному интервалу, в напряжение. При этом вход блока 22, являющийся первым входом блока 9, соединен с выходом сглэживающего фильтра 8. Первый выход блока 22 форми- ровакия вспомогательных сигналоо рассогласования подключен ко входам блоков 23.1, 23.2 формирования сигналов управления коммутатором и к первому входу
коммутатора 24. Второй и третий выходы блока 22 формирования эспсмогательных сигналов рассогласования подключены со ответственно к второму и третьему входам коммутатора24. Выхоцблока23.1 формиро-.
вания первого сигнала управления коммутатором подключен к четвертому входу коммутатора 24, выход блока 23.2 формирования второго сигнала управления коммутатором подключен к пятому входу
коммутатора 24. Выход коммутатора 24 подключен к входу блока 25 отработки сигнала рассогласования. Первый вход блока 27 уточнения временного ингеоьала подключен к выходу преобразователя 26 напряжения, пропорционального грубому временному интервалу, в угол поворота, вход которого, являющийся вторым входом блока 9 соединен с выходом преобразователя 18 координат. Выход блока 25 подключен
ко второму входу блока 27 уточнения временного интервала. Выход блока 27 уточнения временного интервала подключен к входу преобразователя 28 угла поворота, пропорционального уточненному пременному интервалу, в напряжение, выход которого, являющийся выходом блока 9, соединен с выходом блока 5 формирования счислимой разности фаз и с первым входом схемы 10 сравнения уточненного и грубого
временных интервалов.
Блок 22 формирования вспомогательных сигналов рассогласования блока 9 представляет собой электромеханическое устройство, моделирующее в виде напряжения переменного тока функциональные зависимости
A
Др + 1;(5)
.
Блок 22 использует в своем составе усилитель переменного тока частоты 400 Гц, асинхронный электродвигатель - генератор ДГ-0.5ТА, механический редуктор ОЦ4.220.336, линейный многооборотный прецизионный потенциометр ППМЛ.
Блоки 23.1, 23.2 формирования первого и второго сигналов управления коммутатором представляет собой электронные устройства усиления сигнала рассогласования. Блок 23,1 моделирует в виде напряжения переменного тока функциональную зависимость
иукр.1 ГКус.1 Др1 при Ду 0,
1 Опри 0, (б)
где Кус.1 - коэффициент усиления усилителя блока 22. Блок 23.2 моделирует функциональную зависимость
Uynp.2 JOпри 0 (у)
(Кус.2 А у при где Кус.2 коэффициент усиления усилителя блока 23.2.
Коммутатор 24 представляет собой электромеханическое реле типа РЭС-15 и моделирует функциональную зависимость
При Uynp.1 UnopHUynp2. U пор
&R
ком
при Uynp.1 SUnop И Uynp2 U пор
ДуЭЗ при Uynp.1 Unop И Uynp.2 Unop (8)
где Unop - величина порогового напряжения.
Блок 25 отработки сигнала рассогласования представляет собой электромеханическое исполнительное устройство усиления, отработки и интегрирования сигнала рассогласования Дубком , реализованное с помощью электронного усилителя, асинхронного электродвигателя-генератора ДГ-0.5ТА, механического редуктора ОЦ4.220.366 и моделирующее в виде угла поворота функциональную зависимость
At(t)A(t)-TP
Тр Д K(t - r)AyvOM(r)d r,(9)
где К( т) - импульсная переходная функция блока 25 отработки, соответствующая передаточной функции электродвигателя
Кдв(р) (10)
ТдВ - постоянная времени электродвигателя,
Тр - период несущей частоты радиоимпульсов.
Преобразователь 26 представляет собой электромеханическое устройство преобразования напряжения в угол поворота использующее в своем составе усилитель переменного тока частоты 400 Гц, асинхрон- ный электродвигатель - генератор ДГ- 0.5ТА, механический редуктор ОЦ4,220.366, линейный многооборотный прецизионный потенциометр ППМЛ. Блок 27 уточнения временного интервала представляет собой механический дифференциал типа
ОЦ4.223.131. Преобразователь 28 представляет собой линейный многооборотный прецизионный потенциометр ППМЛ.
Схема 10 сравнения уточненного и грубого временных интервалов выполнена в виде схемы вычитания на резисторах типа МЛТ и представляет собой решающую схему формирования разности уточненного временного интервала и грубого временного интервала в соответствии с функциональной зависимостью
At(tH(t)-trp(t),(11)
где t - уточненный временной интервал, поступающий с выхода блока 9 формирования уточненного значения временного интервала;
trp - грубый временной интервал, поступающий с выхода блока 14 грубого отсчета. Моделирование функциональной зависимости (11) производится с помощью резисторов типа МЛТ.
Блок 11 формирования управляющего сигнала представляет собой электронное реле времени и обеспечивает формирование управляющего сигнала в виде напряжения постоянного тока и выдачу его в течение фиксированного длительности интервала ТВр времени после запуска оператором его работы (например, путем кратковременного
замыкания кнопки) в соответствии с зависимостью
Uynp(t) ) UHHT
( 0 при t Три.(12)
где Uynp - выходное напряжение блока 11 (реле времени);
Unm - напряжение источника питания (не показан);
Три - фиксированный интервал времени срабатывания реле времени после замыка- ния оператором кнопки управления (сигнал запуска);
t - текущий момент времени после замыкания оператором кнопки управления.
Блок 12 коммутации представляет со- бой электрическое реле типа РЭС-15 и моделирует функциональную зависимость
ых
Uynp-Unm. О прииупр 0,(13)
где Ду - текущее значение поправки к счислимому значению разности фаз
- выходной сигнал блока коммутации;
Uynp - напряжение управления, подаваемое оператором на второй вход блока 12 коммутации при работе устройства на точке с известными координатами ХИст, УИст. Unm - напряжение источника питания.
Блок 13 интегрирования сигнала коррекции представляет собой электромеханическое устройство усиления, отработки и интегрирования сигнала рассогласования , реализованное с помощью электронного усилителя, асинхронного электродвигателя-генератора ДГ-0.5ТА, механического редуктора ОЦ4.220.366, линейного многооборотного прецизионного потенциометра ППМЛ и моделирующее в виде напряжения переменного тока функциональную зависимость
(t) Кп / К (t - Г) (Г) d Г , (14)
t
где Кп - коэффициент передачи блока 13;
К(г) - весовая функция фильтра, представляющего собой инерционный элемент с передаточной функцией
К(р) Р(ТдвР+1)
ТдВ - постоянная времени инерционного звена (электродвигателя);
Р - оператор преобразования Лапласа.
Датчик 15 курса блока 14 представляет собой гиромагнитный датчик типа ТКС-П.
Датчик 16 скорости блока 14 представляет датчик воздушных сигналов типа ДВС.
Вычислитель 17 координат блока 14 представляет собой решающую схему вычисления прямоугольных координат X(t), Y(t) текущего местоположения по данным датчика курса a (t) и датчика скорости W(t) в виде угла поворота и вводимым оператором начальным координатам Х0, Y0 в виде угла поворота. Вычислитель 17 координат (фиг,4) содержит блок 29 отработки курса, синусно- когинусный потенциометр 30, интегрирующий двигатель 31 по первой составляющей скорости Wx, индикатор 32 первой прямоугольной координаты, интегрирующий двигатель 33 второй составляющей скорости WY, индикатор 34 второй прямоугольной координаты. При этом вход блока 29 является первым входом вычислителя 17 и предназначен для ввода текущего значения курса a(t). Первый вход синусно-косинусного потенциометра 30 подключен к выходу блока 29. Второй вход синусно-косинусного потенциометра 30 является вторым входом вычислителя 17 и подключен к выходу датчика 16 скорости. К первому выходу потенциометра 30 последовательно подключены интегрирующий двигатель 31 и индикатор 32. Второй вход индикатора 32 является входом для ручного ввода первой начальной координаты Х0. Выход индикатора 32 является первым выходом вычислителя 17. Ко второму выходу потенциометра 30 подключены последовательно соединенные интегрирующий двигатель 33 и индикатор 34. Второй вход индикатора 34 предназначен для ручного ввода второй начальной координаты YO. Выход индикатора 34 является
вторым выходом вычислителя 17.
Блок 29 отработки курса представляет собой электромеханическое устройство, предназначенное для дистанционной сель- синной передачи курса потребителю, содер0 жащее сельсин-приемник типа 573К и электродвигатель типа ДИД-0.5ТА Блок 29 осуществляют отработку курса a (tj, поступающего от датчика 15 курса.
Синусно-косинусный потенциометр 30
5 используется, например, в аналоговом навигационном устройстве АНУ-1 и обеспечивает формирование составляющих скорости Wx. WY изменения прямоугольных координат по осям системы координат X, Y в соот0 ветствии с зависимостями Wx Wco3« ; a.
Интегрирующие двигатели 31 и 33 представляют собой асинхронные электродвига5 тели-генераторы ДГ-0.5ТА с механическими редукторами ОЦ4.220.366.
Индикаторы 32, 34 представляют собой механические дифференциалы ОЦ4.223.131 и механические счетчики типа отсчетного
0 десятичного счетчика СОД-2Б-3 ОЦ2.780.226-02, обеспечивающие суммирование начальных прямоугольных координат Х0, YO и приращений прямоугольных координат ДХ V4-t, AY Wy.t ( где t5 время работы устройства с момента ввода оператором начальных прямоугольных координат Х0 , YO ) и индикацию начальных и текущих значений прямоугольных координат в процессе работы устройства.
0Преобразователь 18 координат (фиг.5) содержит блок 35 отработки дальности до ведущей станции, блок 36 отработки дальности до ведомой станции, блок 37 вычитания дальностей, преобразователь 38 угла поворота, про5 порционального разности дальностей до наземных станций в напряжение.
В преобразователе 18 блок 35 отработки дальности до ведущей станции содержит блок 39 вычисления дальности до ведущей
0 станции и следящую систему 40 ввода дальности до ведущей станции. Блок 36 отработки дальности до ведомой станции содержит блок 41 вычисления дальности до ведущей станции и следящую систему 42 ввода даль5 ности до ведомой станции. При этом соединенные между собой первые входы блоков 39, 41 по первой прямоугольной координате (X), являющиеся первым входом преобразователя 18 координат, соединены механически с первым выходом вычислителя 17 координат, Соединенные между собой вторые входы блоков 39, 41 по второй прямоугольной координате (Y), являющиеся вторым входом преобразователя 18 координат, соединены механически со вторым выходом вычислителя 17 координат. Выходы блоков 39. 41 электрически подключены к следящим системам соответственно 40, 42. Третий вход блока 39 является третьим входом преобразователя 18 координат по ручному вводу первой прямоугольной координаты (Хд) ведущей станции. Четвертый вход блока 39 является четвертым входом преобразователя 18 координат по ручному вводу второй прямоугольной координаты (YA) ведущей станции. Третий вход блока 41 япляется пятым входом преобразователя 18 координат по ручному вводу ер- вой прямоугольной координаты (Хв) ведомой станции. Четвертый вход блока 41 является шестым входом преобразователя 18 координат по ручном вводу второй прямоугольной координаты (YB) ведомой станции. Пятый вход блока 39 по сигналу дальности до ведущей станции механически подключен к выходу следящей системы 40, являющемуся выходом блока 35 отработки дальности до ведущей станции. Пятый сход блока 41 по сигналу дальности до ведомой станции механически подключен к выходу следящей системы 42, являющемуся выходом блока 36 отработки дальности до ведомой станции. Первый вход блока 37 вычитания дальности подключен механически к выходу блока 35 отработки дальности до ведущей станции, второй вход подключен к выходу блока 36 отработки дальности до ведомой станции, а выход механически подключен ко входу преобразователя 38 угла поворота, пропорционального разности дальностей до наземных станций, напряжение. Выход преобразователя 38 является выходом преобразователя 18 координат по сигналу счислимого временного интервала. Блок 39 вычисления дальности до ведущей станции преобразователя 18 представляет собой решающую схему вычисления дальности со счислимой точки до ведущей станции в соответсгоии с зависимостью
rAW-Vtxl P ATTlYltpTAl2; (15)
где Хд, YA - прямоугольные координаты ведущей станции;
ГА(Г.) - дальность от счислимой точки с координатами X(t), Y(t) до вед/щей станции, и вычисления сигнала рассогласования
между величиной ГА и значением ГА , поступающим с выхода следящей системы 40 в соответствии с зависимостью
Д (ГА-ГА ),(16)
где КА - коэффициент передачи следящей
системы.
Следящая система 40 ввода дальности до ведущей станции представляет собой электромеханическое исполнительное устройство усиления, отработки и интегрирования сигнала рассогласования Дгд, формируемого в блоке 39, и формирования выходного сигнала в виде угла поворота.Блок 41 вычисления дальности до ведомой станции представляет собой решающую схему вычисления дальности со счислимой точки до ведомой станции в соответствии с зависимостью
20
rB(t) vtX(t)-Xbr+ Y(t)::ViF ,(17)
ХБ. YB прямоугольные координаты вэдо- мой станции;
ГБ(Т-) - дальность от счислимой точки с координатами до ведомой станции, и вычисления сигнала рассогласования
между величиной ГБ и значением rj,, поступающим с выхода следящей системы 42 в соответствии с зависимостью
ДГБ КБ(ГБ-ГБ ),(18)
где КБ - коэффициент передачи следящей системы.
Следящая система 42 ввода дальности до ведомой станции представляет собой
электромеханическое исполнительное устройство усиления,отработки и интегрирова- ния сигнала рассогласования ДГБ, формируемого в блоке 41 и формирования выходного сигнала в виде угла поворота.
Блок 37 вычитания дальностей представляет собой механический дифференциал и обеспечивает формирование в виде угла поворота счислимой гиперболической координаты в соответствии с зависимостью
2a(t) rb(t)-rA(t).(19)
Преобразователь 38 угла поворота, пропорционального счислимому временному интервалу, в напряжение осуществляет преобразование счислимой гиперболической координаты 2а в счислимый временной интервал trp в соответствии с зависимостью
trp Ј 2 а ,
(20)
(где С - скорость распространения радио- оолн) с помощью механического редуктора, имеющего коэффициент передачи, равный 1 /С, и затем преобразование угла поворота в напряжение с помощью линейного многооборотного прецизионного потенциометра типа ППМЛ.
Построение блоков 39,41 преобразователя 18 определяется их функциями в соответствии с зависимостями (15), (17).
Для моделирования параметров и функциональных зависимостей в преобразователе 18 координат используются следующие элементы:
в блоках 39, 41 - ме -анические редукторы ОЦ4.220.366, механические дифференциалы ОЦ4.223.131, линейные многооборотные потенциометры ППМЛ, функциональные многооборотные прецизи онные потенциометры ППМФ;
в блоках 40, 42 - усичители переменного тока частоты 400 Гц, асинхрончые электродвигатели-генераторы ДГ-0.5ТА, механический редуктор длг усиления, отработки и интегрирования сигналов рассогласования;
D блоке 37 - механический дифференциал ОЦ4.223.131:
в Олоке 38 - механический редутор ОЦ4 220.366, многооборотный линейный прецизионный потенциометр ППМЛ.
Устройство работает следующим образом.
Радиоимпульсы наземных ведомой и ведущей передающих станций РНС, прямоугольные координаты месюположения которых (Хд, YA, ХБ. УБ) известны, поступают на вход приемника 1 (фиг.1), усиливаются, фильтруются в полосе пропускания приемника и передаются далее в блок 2 точного отсчета. В блоке 2 с помощью следящих систем производится измерение разности фа рр высокочастотных колебаний принятых радиоимпульсов ведомой и ведущей земных передающих станций. При изменениях разности фаз (fa (t) в блоке 2 возможно появление систематических погрешностей Атеист, обусловленных условиями распространения радиоволн с неточностью поддержания кодовых задержек излучения сигналов ведомыми станциями, и случайных погрешностей (1) за счет воздействия флюктуационных помех на входе приемника 1. С учетом этих погрешностей измеренную с помощью блока 2 разность фаз можно представить в следующем виде
() Ґ. (t) + Атеист + (t), (21) где (fa (t) - истинное значение разности фаз а момент времени t:
- систематическая составляющая погрешность измерений разности фаз, вызванная условиями распространения радиоволн или неточным поддержанием кодо0
5
0
5
0
5
0
5
0
5
БЫХ задержек излучения сигналов ведомыми станциями;
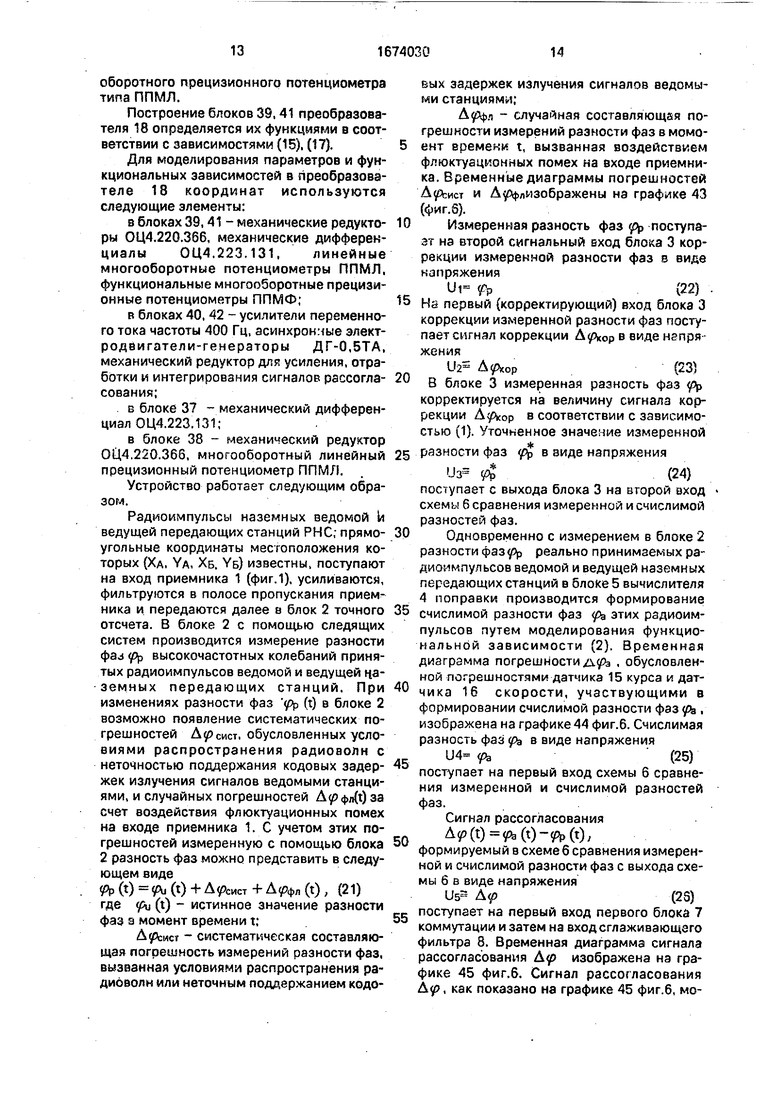
- случайная сое являющая погрешности измерений разности фаз в момо- ент времени t, вызванная воздействием флюктуационных помех на входе приемника. Временные диаграммы погрешностей ДуЪкт и Д лизображены на графике 43 (фиг. 6).
Измеренная разность фаз рр поступа- ,гг на второй сигнальный вход 3 коррекции измеренной разности фаз в виде напряжения
Ui- TP(22)
На первый (корректирующий) вход блока 3 коррекции измеренной разности фаз поступает сигнал коррекции в виде нгпря жсния
U2 Духор(23)
В блоке 3 измеренная разность фаз уэр корректируется на величину сигнала коррекции в соответствии с зависимостью (1). Уточненное значечие измеренной
разности фаз ify в виде напряжения
Из3 Ј(24)
поступает с выхода блока 3 на ьгорой вход схему 6 сравнения измеренной и счислимой разностей фаз.
Одновременно с измерением в блоке 2 разности фазуэр реально принимаемых радиоимпульсов ведомой и ведущей наземных передающих станций в блоке 5 вычислителя 4 поправки производится формирование счислимой разности фаз ра этих радиоимпульсов путем моделирования функциональной зависимости (2). Временная диаграмма погрешности Ауъ . обусловленной погрешностями датчика 15 курса и датчика 16 скорости, участвующими в формировании счислимой разности фаз фл , изображена на графике 44 фиг.6. Счислимая разность фаз в виде напряжения
U4 fb(25)
поступает на первый вход схемы 6 сравнения измеренной и счислимой разностей фаз.
Сигнал рассогласования
Afp(t)ffe(t)-fft,(t), формируемый в схеме 6 сравнения измеренной и счислимой разности фаз с выхода схемы 6 в виде напряжения
Us3 (25)
поступает на первый вход первого блока 7 коммутации и затем на вход сглаживающего фильтра 8. Временная диаграмма сигнала рассогласования Др изображена на графике 45 фиг.6. Сигнал рассогласования Ду, как показано на графике 45 фиг 6, может содержать систематическую составляющую Лесист - Л/Ыст , медленно меняющуюся составляющую и быстро меняющуюся (флюктуационную) составляющую Ду4,1 - , которая обусловлена воздействием флюктуационных помех на результаты измерений разности фаз в блоке 2 точного отсчета.
Сглаживающий фильтр 8 формирует усредненное значение сигнала рассогласования в соответствии с формулой (А), который я оиде напряжения
Ues (27)
поступает на первый вход блока 9 формирования уточненного значения временного интервала. Временная диаграмма сигнала рассогласования Ду изображена на графике 46 фиг.6. Для графика 46 фиг.6 характерна меньшая величина флюктуации сигнала рассогласования по сравнению с сигналом рассогласования Д , представленным на графике 45 фиг.6. На второй вход блока 9 поступает сигнал счислимого временного интервала trp в виде напряжения
Urr-trp(28)
с выхода преобразователя 18 координат.
В блоке 9 формирование уточненного значения временного интервала t(t) производится следующим образом. Сигнал Ду; в виде напряжения UG поступает на первый вход блока 9, то есть на вход блока 22 (см.фиг. 1,3).
В блоке 22 (см.фиг.3) формируются вспомогательные сигналы рассогласования в виде напряжений в соответствии с зависимостями
Ua Ду - Ду5 Ug ДуЈ ДуЭ + 1 Uio ДуОз 1
(29)
Первый вспомогательный сигнал рассогласования в виде напряжения Us поступает на входы блоков 23.1 и 23.2 первого и второго сигналов управления коммутатором и первый вход коммутатора 24. Второй и третий вспомогательные сигналы рассогласования в г.иде напряжений Ug и Uio поступают соответственно на второй и третий пходы коммутатора 24. В блоке 23,1 формируется первый сигнал управления коммутатором в соответствии с зависимостью (6), который в виде напряжения Uynp.1 поступает на четвертый вход коммутатора 24. В блоке 23.2 формируется второй сигнал управления коммутатором в соответгтвии с зависимостью(7), который в виде напряжения Uynp .2 поступает на пятый вход коммутатора 24. В зависимости от величины напряжений Uynp.i, Uynp.2 сигналов управления на выход коммутатора 24 поступает один из вспомогательных -сигналов рассогласования
Ду}, Ду52, в соответствии с зависимостью (8): если сигнал рассогласования на
jfc
входе блока 22 Ду9 OJ5 , то uynpl Unop; Uynp.2 Unop и на выход коммутатора 24
поступает сигнал в виде напряжения бСЙи-сигнал рассогласо
еания Д / 0,5, то Uynp.1 Unop и на выход коммутатора 24 поступает сигнал
ДУБКОМ , в виде напряжения . если сигнал рассогласования Ду9 0,5 , то Uynp2 Unop и на выход коммутатора 24 поступает сигнал Ду9з в виде напряжения .; С выхода коммутатора 24 вспомогательный сигнал рассогласования в виде напряжения UKOM поступает на вход блока 25 отработки сигнала рассогласования. Блок 25 осуществляет интегрирование сигнала рассогласосания в соответствии с зависимостью(9), его выходной сигнал поправки At а виде угля поворота
(30)
поступает на второй вход механического дифференциала 27. На второй вход блока 9 поступает сигнал счислимого временного
интервала trp с выхода блока 14 грубого отсчета В блоке 9 этот сигнал, поступающий в виде напряжения U на вход преобразователя 26, преобразуется в механический угол поворота
# trp (31)
и поступает на первый вход механического дифференциала 27. С выхода дифференциала 27 разность углов поворота /J1 и Д в виде механического угла поворота
Дз /&-#(32)
поступает на вход преобразователя 28. Преобразователь 28 преобразует угол поворота Дз, пропорциональный уточненному временному интервалу t, в напряжение
.(33)
Блоки 5-9 образуют замкнутую следящую систему, переходной процесс в которой завершается в том случае, когда сигнал рассогласования ДуО становится равным нулю. По окончании переходного сигнал t на выходе блока 9 формирования уточненного значения временного интервала содержит целое число циклов, соотвеп,вующее грубому временному интервалу trp, и дробную часть, равную уточненному значению измерения разности фазуэр На выходе блока 5 счислимая разность фаз у% равна
измеренной разности фаз fo , на выходе схемы 6 сравнения Д 0, и на выходе фильтра 8 сигнал равен А .
Временная диаграмма остаточной погрешности
5t(tH(tHu(t).(34)
где tu - истинное значение временного интервала, до компенсации систематической погрешности измерения разности фаз показана на графике 47 фиг,5,
При этом остаточная систематическая погрешность А1сист формирования временного интервала t связана с систематической погрешностью Атеист измерения разности фаз р$ соотношением
ДГсист- Атеист -Т(35)
График 47 фиг.6 является характерным (по наличию систематической погрешности ) для предложенного устройства без компенсации систематической погрешности.
С целью исключения влияния погрешности АуЗсист измерения разности фаз утр в блоке 2 на точность формирования выходного сигнала t устройства, в устройстве перед работой с помощью блоков 7,10,12 и 13, 3 осуществляется формирование поправки и компенсация систематической погрешности Aybicr и измеренной разности фаз f)p при расположении подвижного объекта на точке с известными прямоугольными координатами (Х0, Yo).
Для выделения сигнала систематической погрешности Душист (на выходе схемы 6 сравнения) оператором после ввода в устройство начальных прямоугольных координат Хо, YO подается команда на формирование сигнала управления в блоке 11 (путем кратковременного механического воздействия на кнопку, расположенную в блоке 11, с помощью которой запускается реле времени блока 11). Блок 11 формирует сигнал управления в виде напряжения Uynp в соответствии с зависимостью (12) фиксированной продолжительности.
Сигнал управления Uynp поступает на третий вход первого блока 7 коммутации и второй вход второго блока 12 коммутации. По этому сигналу осуществляется подключение выхода схемы 6 сравнения ко входу блока 13 интегрирования сигнала коррекции и выхода схемы 10 сравнения уточненного и грубого временных интервапов ко входу сглаживающего фильтра 8 выход схемы 6 отключается от входа сглаживающего фильтра 8. При этом блоки 10, 7, 8 и 9 образуют замкнутую следящую систему обработки сигнала рассогласования Ау ; блок 6, 12, 13, 3 образуют замкнутую следящую систему обработки сигнала рассогласования блоки 6,7,8,9,5 образуют разомкнутую
систему, так как в первом блоке 7 коммул - ции разомкнута связь между выходом схемь, 6 и входом сглаживающего фильтра.
Работа замкнутой следящей системы, сбразозанной блоками 10, 7, 9, 8, происхо,-;ит педующим обрасом. С выхода блока 9 уточненный временной интервап t в виле напряжения Un, формируемого согласно (33), поступает на первый вход схемл 10 сравнения уточненного и грубого времемных интервалов, на второй вход схемы 10 с выхода пресСразоватепя 18 координат поступает счислимый временной интервгл в виде напряжения U. формируемого согласно (28). С выхода схемы 10 сигнал рассогласования At. формируемый согласно (11), в виде напряжения
U12 At(3G)
поступает на второй РХСД первого блока 7 коммутации, с выхода блока 7 - на вход
сглаживающего фильтра 8 и с выхода фильтра Ь г виде напряжения Ue - на первый вход блока 9 формирования уточненного значения временного интервала. После окончания переходного процесса на выходе
схемы 10 сравнения устанавливается сигнал рассогласования A , а на выходе блока 9 формирования уточненного значения временного интервала - временной интервал .
Выходной сигнал блока 9 поступает на вход блока 5 формирования счислимой разности фаз в виде напряжения Un, формируемого согласно (33). Сигнал рассогласования Ay (t) формируемый в схеме 6
сравнения измеренной и счислимой разности фаз с выхода схемы 6 в виде напряжения Us. формируемого согласно (26), поступает на первый вход второго блока 12 коммутации.
Работа замкнутой следящей системы, образованной блоками 6, 12, 13, 3, происходит следующим образом. Выходной сигнал второго блока 12 коммутации, сформированный в соответствии с зависимостью (13)
в виде напряжения
(37)
поступает на вход блока 13 интегрирования сигнала коррекции. С выхода блокг 13 на второй вход блока 3 коррекции измеренной
разности фаз сигнал коррекции . сформированный в соответствии с зависимостью (14), поступает на виде напряжения U14 AtfVop.(38)
В блоке 3 измеренная разность фаз fo (t) корректируется на величину сигнала (t) и поступает на вход схемы б сравнения измеренной и счислимой разности фаз. После окончания переходного процесса в замкнутой следящей системе, образованной блоками 6, 12, 13, 3, на выходе схемы 6 сравнения устанавливается значение сигнала .
К моменту времени окончания действия управляющего сигнала с выхода блока 11 формирования управляющего сигнала на входе блоков 7 и 12 коммутации переходной процесс в замкнутой следящей системе, образованной блоками 6, 12, 13, 3 завершается.
После окончания сигнала управленил, формируемого блоком 11, коммутатор 7 отключает вход сглаживающего фильтра 8 от выхода схемы 10 сравнения уточненного и грубого временных интервалов и подключает его к выходу схемы 6 сравнения измеренной и счислимой разности фаз, блок 12 коммутации отключает вход блока 13 интегрирования сигнала коррекции от выхода схемы б сравнения измеренной исчислимой разности фаз, блок 13 интегрирования сигнала коррекции запоминает сигнал коррекции измеренной разности фаз.
Счисление временного интервала trp в блоке 14 производится по сигналам датчика 15 курса a (t) и датчика 16 скорости W(t), поступающим в виде напряжений
U15 a(39)
(40)
соответственно на первый и второй входы вычислителя 17 автоматически и непрерывно.
Перед началом работы устройства оператором вручную вводятся в вычислитель 17 блока 14 начальные прямоугольные координаты Х0, YO начального местоположения устройства в виде механических углов поворота
,(41)
#5 Yo,(42)
соответственно по третьему и четвертому входам. Ввод начальных прямоугольных координат Х0, YO может осуществляться как в процессе движения объекта, так и на стоянке при точно или приблизительно известных координатах местоположения.
Счисление прямоугольных координат текущего местоположения Y(t), X(t) в вычислителе 17 блока 14 осуществляется путем моделирования функциональных зависимо- стей на аналоговом вычислительном устройстве, образованном блоками 29-34 (см. фиг,4):
X(t)Xo+ AX(t)X0 + / W (т) Cos a (r) d r
Y(t)Yo+AY(t)Yo + / W (r) Sin a (r) d т(43).
где Х0, YO - начальные прямоугольные координаты местоположения устройства, Л (t) - сигнал датчика курса скорости в момент времени t;
W(t) - сигнал датчика скорости в момент времени t;
AX(t), A Y(t) - приращения прямоуголь- ных координат за интервал времени Од.
Для этого напряжения Ui5,Ui6, формируемые в соответствии с (39) и (40), поступают (см.фиг.4) на вход соответственно блока 29 отработки курса и второй вход синусно- косинусного потенциометра 30. С выхода блока 29 сигнал курса а (т.) в виде механического поворота
(44)
поступает на первый вход синусно-косинус- ного потенциометра 30, на второй вход которого поступает сигнал скорости W(t) в виде напряжения the с выхода датчика 16 скорости. На выходах потенциометра 30 формируются сигналы составляющих скоро- сти измерения прямоугольных координат в виде напряжений Ui Wx Wcosa
Ui8 Wv Wsina(45)
которые поступают на входы интегрирую- щих двигателей, соответственно 31 и 33. На выходе интегрирующих двигателей 31 и 33 формируются приращения прямоугольных координатА X(t) и A Y(t) в виде механических углов поворота t
Wx(r)dt . ,
AY / Wy(r)dr,
(46)
которые поступают на первые входы индикаторов соответственно 32 и 34. На вторые входы этих индикаторов оператором вводятся начальные прямоугольные координаты Х0, YO в виде механических углов
поворота и /fe , формируемых в соответствии с формулами (41) и (42). Индикаторы 32 и 34, пр-едставляющие собой механические отсчетные устройства, включающие механические дифференциалы ти
па ОЦ4.223.131 и счетчик отсчетный десятичный типа СОД-25-3 ОЦ2,780,226-02 формируют счислимые значения прямоугольных координат Xft). Y(t), которые поступают на их выходы в виде механических углов поворота.
//9 Х Х0+АХ
/ 10SY Y0+AY(47)
Прямоугольные координаты X(t), Y(x) с выхода вычислителя 17 координат в виде механических углов поворота /% , поступают на первый и второй входы преобразователя 18, т.е. на первый и второй входы блоков 35 и 36 (см. фиг.5) автоматически и непрерывно. В гачэле работы устройства или при его нчстройке я преобразователь 1Ь оператором вручную вводятся: прямоугольные координаты пплущеи наземной станции Хд. YA и прямоуго/.ьные координаты ведомой наземной станции Хь, YE в виде механических углоз поворота
. /3,з ХБ,
/3i2-YA, .(43)
соответственно на третий и четвертый РХО- ды бло э 35 отработки дальности до ведущей станции и на т ретий и четвертый входы блока 36 отработки дальности до ведомой станции (фиг.5).
В решающи/, схемах блоков 39 и 41 (фиг.5), входящих в блоки 35, 36 преобразователя 18 координат и моделирующих зависимости (15) и (17), пс автоматически вводимым прямоугольным координатам X(t) и Y(t) и введенным заранее вручную оператором координатам наземных станций Хд, Ye, и Xr, YB производится формирование сигналов дальностей ГА и ГБ Соответственно до ведущей и ведомой наземных станций, Величины сигналов ГА и ГБ сравниваются с величинами сигналов ГА Б , поступающих с выхода соответствующей следящей системы 40, 42 и вырабатываются разностные сигналы рассогласования Лтд и ДГБ. Под воздействием сигналов рассогласования ДгА и А гБ, определяемых соотношениями (16) и Г18), происходит изменение величин ГА , ГБ на выходе следящих систем 40, 42 до тех пор, пока сигналы рассогласования Лтд, ДГБ на выходе блоков соответственно 39, 41 не станут равными нулю, при этом значения дальностей ГА , гь на выходе соответствующей следящем системы станут рав-ными ГА гд; ГБ ГБ. При изменении счис- лимых прямоугольных координат X(t), Y(t) происходит изменение величин сигналов ГА, TF. появляется сигнал рассогласования или и происходит изменение соответствующего сигнала ГА , ГЕ на выходе следящей системы 40 или 42, компенси0
F.
0
В
U
5
0
5
0
5
PY jL ee изменение величин иигн.элоо ГА, гг в бпсжах 40, 42. Сигналы дальностей ГА и ГБ в виде механических углов поворота
/3t5 s ГА
#6 ГБ(49)
поступают соответственно на первый и второй входы блока 37 вычитания дальностей.
Блок 37 вычитания дальностей моделирует зависимость (19) и формирует сигнал счислимой гиперболической координаты а виде механического угла поворота
/V/ 2а,(50)
/ошрый поступает на вход преобразователя ЗЯ.
Поеобразоьягель38 угла поворота, пропорционального счислимому временному интервалу, в напряжение осуществляет преобразование счислимой гиперболической координаты в счислимый временной ичтер- вял ггр в соответствии с зависимостью (20). который в виде напряжения U формируемого п соответствии с ЗЧРИСИМОСГЬЮ (28). nocTvnaeT на вход блока 9 формирования уточненного значения временного интервала и схемы 10 срагненир уточненного и грубого временных интервалов.
Возможность в предложенном устройстве в отличие от прототипа оценки и компенсации систематической погрешности измеренной разности фаз (при первоначальном расположении, например, а стоянке с известными прямоугольными координатами местоположения), т.е. возможность достижения положительного эффекта, подтверждается следующим образом
Перед началом измерения временных интеразлов устройство размещается на стоянке с известными прямоугольными координатами Х0. YO местоположения
,
,(51)
которые вводятся оператором в устройство в качестве начальных прямоугольных координат и затем оператором на вход блока 11, подается команда на формирование сигнала управления. В блоках 2 и 3 производится измерение разности фаз рр , при этом измерение может производиться с систематической погрешностью ДуЪют . Так как , то на выходе вычислителя 17
Y-YO-YHCT(52)
Истинным прямоугольным координатам Хист, YHCT на входе преобразователя 18 координат соответствует счислимый временной интервал trp на выходе этого лреобразователя, равный истинному временному интервалу
гр.ист(53)
В замкнутой следящей системе, образованной блоками 6,8,9,5, после окончания переходного процесса по отработке сигнала рассогласования на выходе блока 5 формирования счислимой разности фаз устанавливается сигнал
фа 0ист + Д0ист ,(54)
поступающий на второй вход схемы 6 сравнения и компенсирующий сигнал измеренной разности фаз рр
(fa VICT + Дрист,(55)
поступающий на первый вход схемы 6 сравнения, При этом на выходе схемы 6 сравнения устанавливается сигнал Аф 0. на выходе блока 9 формирования уточненного значения временного интервала устанавливается сигнал уточненного временного интервала t. имеющий систематическую погрешность Атеист, определяемую соотношением (35).
Для выделения сигнала систематической погрешности Лесист оператором подается команда на формирование сигнала управления в блоке 11. После окончания переходного процесса в следящей системе, образованной блоками 10,7,8,9, на выходе схемы 10 сравнения устанавливается сигнал рассогласования -0, а на выходе блока 9 - уточненный временной интераал
.
Выходной сигнал блока 9 поступает на вход блока 5 формирования счисли- мой разности фаз, выходной сигнал которого представляет собой истинное значение разности фаз, соответствующее стоянке, на которой расположено устройство т.е., - УИСТ. Сигнал рассогласования Ду на выходе схемы 6 в этом случае, с учетом случайной составляющей погрешности измерений разности фаз в блоке 2, можно представить в следующем виде
А Р (t) (t) фр (t) VICT (#VicT+ А «рйст + А (fan (t) - А рсист - А «5фл (t) (57)
После окончания переходного процесса в замкнутой следящей системе, образованной блоками б, 12, 13, 3, на выходе схемы 5 сравнения устанавливается значение сигнала Ду 0, на выходе блока 13 устанавливается и запоминается сигнал коррекции - (при отсутствии случайных составляющих погрешности измерения разности фаз (). После окончания действия управляющего сигнала с выхода блока 11 замкнутая следящая система, образованная блоками 10,7,8,9 и замкнутая
следящая система, образовананя блоками 6,12,13,3 размыкается; сигнал коррекции ДуЭкор на выходе блока 13 продолжает храниться на протяжении всей последующей
работы устройства.
Дальнейшая работа устройства происходит в режиме измерения временных интервалов в процессе движения объекта в рабочей зоне РНС следующим образом в
0 соответствии с описанными выше процессами. Измеренная разность фаз рр поступает на второй вход блока 3, корректируется на величину сигнала коррекции .который хранится в блоке 13 интегрирования
5 сигнала коррекции и поступает на первый вход блока 3 коррекции, На выходе блока 3 сигнал скорректированного значения измеренной разности фаз fy не содержит систе0 мчтической погрешности Лесист . В связи с этим сигнал рассогласования на выходе схемы 6 содержит только случайную со- с авляющую Дусоя (t) погрешности
измерений разности фаз f% и погрешность 5 ДуЭэ (t) счисления разности фаз (t) в блоке 3 грубого отсчета
А р (t) - у% (1) - $ (t) л,ст (t) f A р (t) - t Aici (t) + (t) А рг (t) А рфл (t)
(57)
Сигнал ДгДт:) рассогласования в виде напряжения Us через блок 7 коммутации поступает на сглаживающий фильтр 8, который осуществляет сглаживание флюктуационной составляющей (t) сигнала рас- согласования и выделение сигнала (t) поправки к счислимому временному интервалу trp. Счислимый временной интервал trp в блоке 9 уточняется на
Q величину погрешности его счисления Atrp-A a- Тр. В вязи с медленным нарастанием погрешности Atrp(t) в блоке 14 грубого отсчета после окончания переходного процесса в замкнутой следящей системе, обраg зованной блоками 6,7,8.9.5, уточненный временной интервал t на выходе блока 9 формирования уточненного значения временного интервала не содержит систематической погрешности измеренияЛт.гр
0
0
ТР, Временная диаграмма остаточной погрешности 61 после компенсации систематической погрешности измерения разности фаз Aybicr показана на графике 48 фиг,б. График 48 фиг.б является характерным (по 5 отсутствию систематической погрешности Атеист) для устройства.
По окончании-переходного процесса в предложенном устройстве измерения временных интервалов обеспечивается ком пенсащ.я систематической погрешности
измерений разности фаз (после оценки этой погрешности на стоянке с известными прямоугольными координатами местоположения), компенсация погрешностей счисления разности фаз, а также сглаживание флюкту- ационной составляющей погрешности измерений разности фаз. Оценивание систематической погрешности измерений разнести фаз, осуществляемое на месте расположения с известными прямоугольными координатами, и последующая компенсация ее на стоянке или в процессе движения объекта позволяют повысить точность измерения временных интервалов.
Формула изобретения Устройство для измерение временных интервалов, содержыцее приемник радио- импульсных сигналов наземных станций ра- динавигационной системы, подключенный к его выходу блок точного отсчета, блек грубого отсчета, содержащий датчик курса, датчик скорости, вычислитель координат и преобразователь координат, а также последовательно соединенные СГЛЭЖИРЭЮЩИЙ фильтр, блок формирования уточненного значения временного интервала, Олох формирования счислимой разности фаз и схему сравнения измеренной и счислимой разности фаз, причем первый и зторгй входы вы числителя координат блока грубого отсчэта подключены соответственно к выходам датчика курса и датчика скорости, а третий и четвертый входы, являющиеся соответственно первым и вторым входами блока грубого отсчета, являются входами для ввода первой и второй начальных прямоугольных координат, первый и второй входы преобразователя координат блока грубого отсчета подключены соответственно к первому и второму выходам вычислителя координат по сигналам первой и второй прямоугольных координат, третий и четвертый входы преобразователя координат, являющиеся соответственно третьим и четвертым входами блока грубого отсчета, являются входами
для ввода и второй прямоугольных координат ведушей наземной станции, пятый и шестой входы преобразователя координат, являющиеся соответственно пятым и шестым входами блока грубо о отсчета, являются входами для ввода пэрвой и второй прямоугольных координат ведомой наземной станции, второй вход блока формирования уточненного значения временного
интервала подключен к выходу преобразователя координат, являющемуся выходом блока грубого отсчета по сигналу счислимо- го втащенного интерпала, отли чающееся тем, что, с целью повышения точности.
измерения временных интервалов, введены схема сравнения уточненного и грубого временных интервалов, блок формирования уп- равпяющего сигнала, первый блок коммутации, последовательно соединенные
второй блок коммутации, блок интегрирования сигнала коррекции и блок коррекции измеренной разности фаз, причем первые входы первого и второго блоков коммутации подключены к выходу схемы сравнения измеренной и счислимой разности фаз, второй нход первого блока коммутации подключен к выходу схемы сравнения уточненного и грубого временного интервалов, э выход подключен к входу с. лаживающею
фильтра первый вход схемь, сравнения уточненного и грубого временных интервалов подключен к выходу блока формирования уточненного знаиенич временного интервала, а второй вход подключен к выходу преобразователя координат блока грубого отсчета, третий вход первого блока коммутации и второй вход второго блока коммутации подключены к выходу блока формирования управляющего сигнала, вход
которого является управляющим входом устройства, второй вход блока коррекции измеренной разности фаз подключен к выходу блока точного отсчета, а выход подключен к зторому входу схемы сравнения измеренной и счислимой разности Фаз.
Т








| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения временных интервалов | 1981 |
|
SU983645A2 |
| Устройство для измерения временныхиНТЕРВАлОВ | 1979 |
|
SU817664A1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА (БАГИС-А) | 1995 |
|
RU2097780C1 |
| УСТРОЙСТВО ДЛЯ ПРИВЯЗКИ ШКАЛ ВРЕМЕНИ | 1992 |
|
RU2046393C1 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2457629C1 |
| Устройство для измерения временного положения импульса | 1984 |
|
SU1185283A1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| Следящий фильтр фазоманипулированного псевдослучайного сигнала | 1982 |
|
SU1072252A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ПРИ ТРАЕКТОРНЫХ ИЗМЕРЕНИЯХ МЕЖПЛАНЕТНЫХ КОСМИЧЕСКИХ АППАРАТОВ ЗА СЧЕТ РАСПРОСТРАНЕНИЯ РАДИОСИГНАЛОВ В ИОНОСФЕРЕ ЗЕМЛИ И МЕЖПЛАНЕТНОЙ ПЛАЗМЕ | 2016 |
|
RU2671921C2 |
| ФАЗОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2582068C1 |



Изобретение относится к измерительной технике и может быть использовано в бортовых устройствах для измерения временных интервалов между радиоимпульсами в радиолокационной и радионавигационной технике. Целью изобретения является повышение точности измерения. Устройство содержит приемник 1 радиосигналов, блок 14 грубого отсчета, блок 2 точного отсчета, сглаживающий фильтр 8, блок 9 формирования уточненного значения временного интервала, блок 5 формирования счислимой разности фаз, схему 6 сравнения измеренной и счислимой разности фаз. В устройство введены схема 10 сравнения уточненного и грубого временных интервалов, блок 11 формирования управляющего сигнала, блоки 7, 12 коммутации, блок 13 интегрирования сигнала коррекции, блок 3 коррекции измеренной разности фаз. Блок 14 грубого отсчета состоит из датчика 15 курса, датчика 16 скорости, вычислителя 17 координат, преобразователя 18 координат. Введение новых блоков и возникновение новых связей ведет к достижению цели изобретения. 6 ил.
Фиг. Z
29
30
w
31
31
33
34
У
ШигМ
#
/vVwtyvVH
н
Ъ
w
| Устройство для измерения временныхиНТЕРВАлОВ | 1979 |
|
SU817664A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
