Изобретение относится к навигации и- может быть использовано в элементах вычислительной техники при определении навигационных параметров.
Известен навигационный счислитель, определяющий дальность от подвижного объекта до заданных точек. Такой счислитель состоит из трех идентичных каналов, определяющих расстояние до заданных точек. Один канал счислителя взят за прототип изобретения. Устройство-прототип содержит первый сумматор, первый вход которого является входом приращения курсового угла, второй вход подключен к выходу блока установки начального курса, а выход- к индикатору курса и входам блоков вычисления синуса и косинуса, вторые входы,которых являются входом приращения пути, при этом выход блока .установки начального расстояния подключен к первому входу второго сумматора, второй вход которого соединен с выходом блока вычисления косинуса, выход суммирующего устройства подключен к индикатору текущего расстояния и первому входу блока деления, второй вход которого подключен к выходу блока вычисления синуса, а выход - к входу первого накопителя, выход-которого соединен с вторым входом первого сумматора 2.
Работа счислителя осуществляется следующим образом.
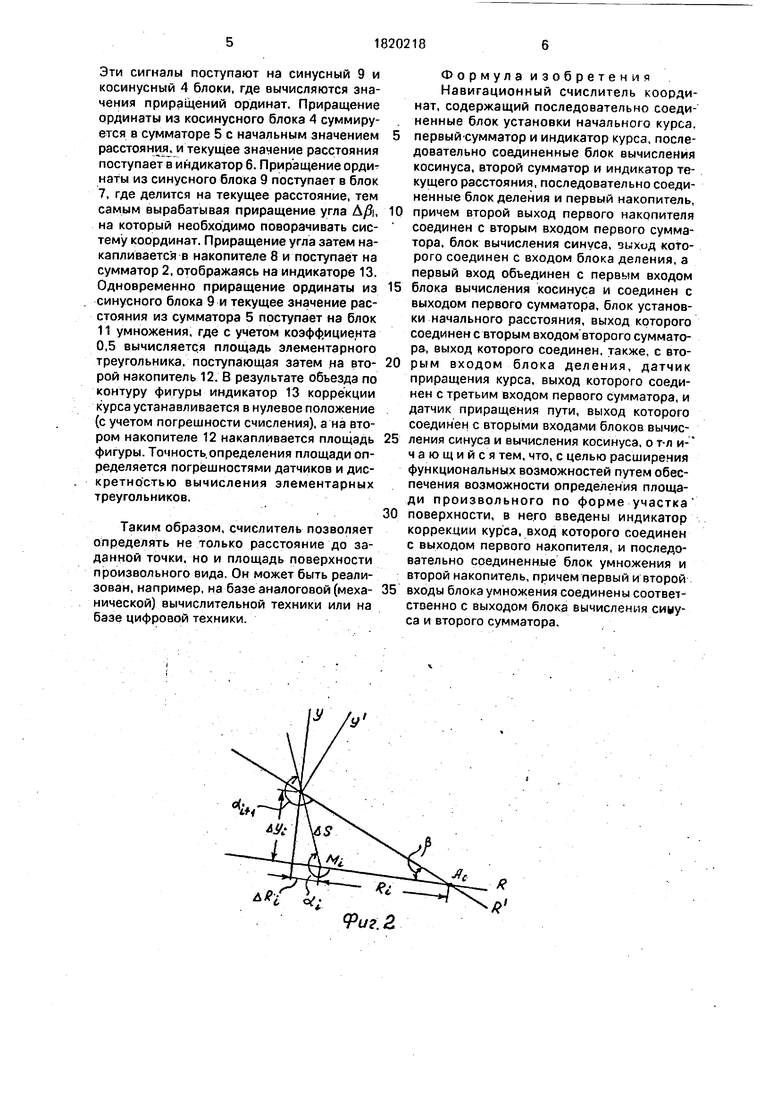
В начальной точке движения объекта М0 (фиг,2) с установленным на немсчислителем координат определяется расстояние от этой точки до любого произвольного ориентира (точка АО) и курсовой угол (угол между направлением на заданную .точку А0 и продольной осью подвижного объекта) известными методами топографии и навигации. Значения начального курса оъи начального расстояния RO вводят в счислитель с помощью блока установки начального курса и блока установки начального расстояния. На первый вход первогЪ сумматора сдатчика (например, гирокомпаса) поступает ин- i формация от приращения курса А «при всяком изменении направления движения. При этом в каждый 1-й момент времени этот сумматор определяет значение а а 0 + + Ла.
Целью изобретения является.расширение функциональных возможностей путем обеспечения возможности определения площади произвольного по форме участка поверхности.
На фиг. 1 представлена структурная схема навигационного счислителя координат.
Навигационный счислитель содержит последовательно соединенные блок 1 установки начального курса, первый сумматор 2 и индикатор 3 курса, а также последовательно соединенные блок 4 вычисления косинуса, второй сумматор 5 и индикатор 6 текущего расстояния и последовательно соединенные блок 7 деления и первый накопи- тель 8. Выход первого сумматора 2
подключен к входам блока-вычисления косинуса и блока 9 вычисления синуса. Второй вход второго сумматора 5 соединен с выходом блока 10 установки начального расстояния. Выход второго сумматора 5 соединен
с первым входом блока 7 деления и первым входом блока. 11 умножения, второй вход которого соединен с выходом блока 9 вычисления синуса и вторым входом блока 7 деления. Выход блока 11 умножения подключен
к .входу второго накопителя 12. Первый и второй выходы первого накопителя 8 подключены соответственно к входу индикатора 13 коррекции курса и второму входу первого сумматора 2. Счислитель содержит
также датчик 14 приращения курса, выход которого подключен к третьему входу первого сумматора 2, и датчик 15 приращения пути, выход которого соединен с вторыми входами блока 9 вычисления синуса и блока
4 вычисления косинуса.
Работает навигационный счислитель следующим образом.
На местности выбирают ориентир (фиг.2, 3, точка АО), относительно которого в процессе работы производится вращение прямоугольной системы координат, и- на- . чальную точку движения объекта М0, на которой устанавливается объект, например автомашина с предлагаемым счислителем. Включают датчик изменения курсового уг- . ла, например 1Г13. Дальномером, например, ДСТ-451 или аналогичным определяют расстояние от начальной точки М0 до ориен- тира АО и вводят в сумматор 5 через блок 10. Шкала угла устанавливается в нулевое положение. С помощью визира, например, 1Т26 . определяют начальный курс объекта относительно направления с начальной точки М0 0 на ориентир А0, вводят его в счислитель через блок 1 и после прохождения через сумматор 2 контролируют по шкале. После этого производится движение объекта по контуру фигуры для измерения ее площади. 5 в процессе движения объекта в счислитель непрерывно поступают значения приращения пути Д S и значения изменения курса Л а, суммируемые непрерывно с начальным значением курса а сумматором 2.
Эти сигналы поступают на синусный 9 и косинусный 4 блоки, где вычисляются значения приращений ординат. Приращение ординаты из косинусного блока 4 суммируется в сумматоре 5 с начальным значением расстояния, и текущее значение расстояния поступает в индикатор 6. Приращение ординаты из синусного блока 9 поступает в блок 7, где делится на текущее расстояние, тем самым вырабатывая приращение угла , на который необходимо поворачивать систему координат. Приращение угла затем накапливается в накопителе 8 и поступает на сумматор 2, отображаясь на индикаторе 13. Одновременно приращение ординаты из синусного блока 9 и текущее значение расстояния из сумматора 5 поступает на блок 11 умножения, где с учетом коэффициента 0,5 вычисляется площадь элементарного треугольника, поступающая затем .на вто- рой накопитель 12. В результате объезда по контуру фигуры индикатор 13 коррекции курса устанавливается в нулевое положение (с учетом погрешности счисления), а на втором накопителе 12 накапливается площадь фигуры. Точность.определения площади определяется погрешностями датчиков и дискретностью вычисления элементарных треугольников.
Таким образом, счиелитель позволяет определять не только расстояние до заданной точки, но и площадь поверхности произвольного вида. Он может быть реализован, например, на базе аналоговой (меха- нической) вычислительной техники или на базе цифровой техники.
Формула изобретения Навигационный счислитель координат, содержащий последовательно соединенные блок установки начального курса, первый сумматор и индикатор курса, последовательно соединенные блок вычисления косинуса, второй сумматор и индикатор текущего расстояния, последовательно соединенные блок деления и первый накопитель, причем второй выход первого накопителя соединен с вторым входом первого сумматора, блок вычисления синуса, зыход которого соединен с входом блока деления, а первый вход объединен с первым входом блока вычисления косинуса и соединен с выходом первого сумматора, блок установки начального расстояния, выход которого соединен с вторым входом второго сумматора, выход которого соединен, также, с вторым входом блока деления, датчик приращения курса, выход которого соединен с третьим входом первого сумматора, и датчик приращения пути, выход которого соединен с вторыми входами блоков вычисления синуса и вычисления косинуса, о т-л и- чающийся тем, что, с целью расширения функциональных возможностей путем обеспечения возможности определения площади произвольного по форме участка поверхности, в него введены индикатор коррекции курса, вход которого соединен с выходом первого накопителя, и последовательно соединенные блок умножения и второй накопитель, причем первый и второй входы блока умножения соединены соответственно с выходом блока вычисления сиыу- са и второго сумматора.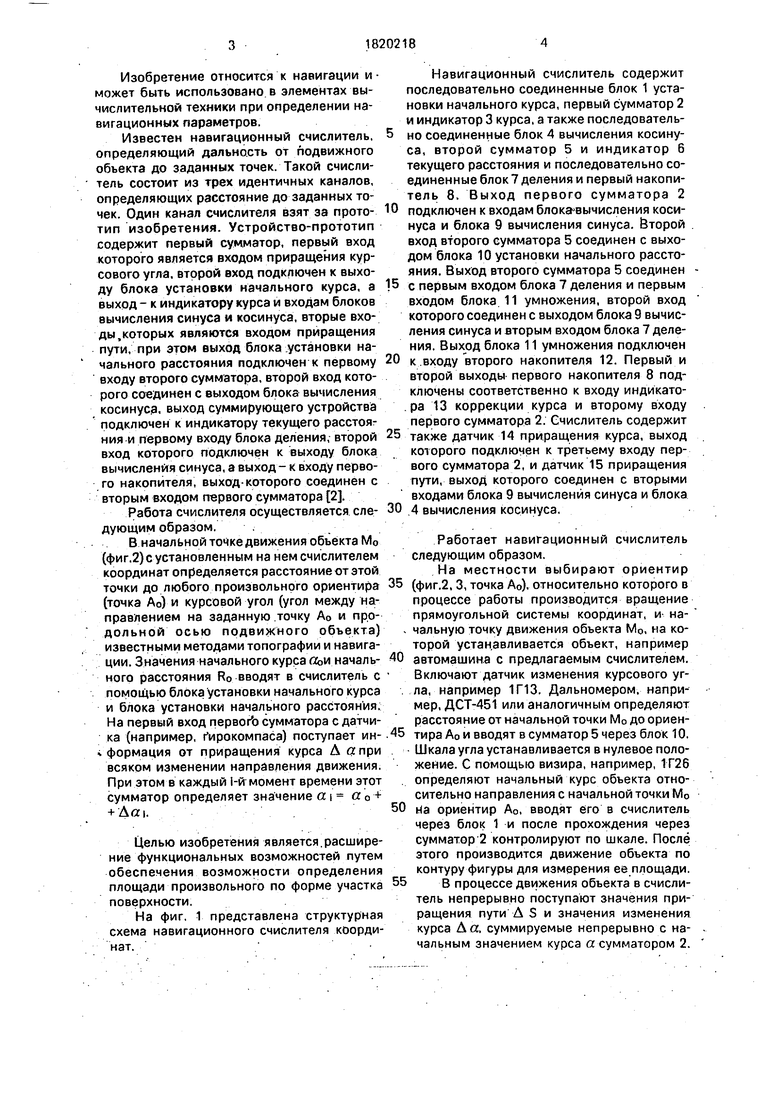
| название | год | авторы | номер документа |
|---|---|---|---|
| Автосчислитель | 1979 |
|
SU836525A1 |
| АНАЛОГОВЫЙ СЧИСЛИТЕЛЬ КООРДИНАТ | 1971 |
|
SU296130A1 |
| СИСТЕМА ОТОБРАЖЕНИЯ ПИЛОТАЖНОЙ ИНФОРМАЦИИ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2046059C1 |
| Тренажер оператора локационных станций | 1982 |
|
SU1072086A2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО | 2001 |
|
RU2208765C1 |
| Устройство для преобразования координат | 1984 |
|
SU1198552A1 |
| БОРТОВОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1991 |
|
RU2027200C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО | 1999 |
|
RU2163352C1 |
| Способ определения координат наземного колесного объекта и устройство для его осуществления | 1990 |
|
SU1818534A1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |

Изобретение относится к навигации и может быть использовано для определения расстояния от заданной точки или поверх(pM.f ности. Целью изобретения является расширение функциональных возможностей путем обеспечения возможности определения площади произвольного по форме участка поверхности. Навигационный счислитель координат содержит два сумматора 2,5. датчик 14 приращения курса, блок 1 установки начального курса, индикатор 3 курса, блоки вычисления косинуса 4 и синуса 9, датчик 15 приращения пути, блок 10 установки начального расстояния, индикатор 6 текущего расстояния, блок 7 деления, два накопителя 8,12, индикатор 13 коррекции курса, блок 11 умножения. 3 ил.
i ;
Фиг. 2
М
ьЪ
9мг. 3
| Бызов Б.Е | |||
| и др | |||
| Военная топография | |||
| М.: Воениздат, 1980, с | |||
| Канатное устройство для подъема и перемещения сыпучих и раздробленных тел | 1923 |
|
SU155A1 |
| АНАЛОГОВЫЙ СЧИСЛИТЕЛЬ КООРДИНАТ | 0 |
|
SU296130A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
