Изобретение относится к области систем управления радиолокационной техники, в частности, к системам управления корабельными радиолокационными станциями (РЛС) и радиолокационными комплексами (РЛК). Предлагаемое решение по системе управления РЛС может использоваться для обнаружения и сопровождения воздушных и надводных целей, является средством освещения воздушной и надводной обстановки, траекторной обработки информации и выдачи целеуказаний. Известно решение по управлению корабельной РЛС (патент Великобритании № 2177566), в котором для увеличения числа отраженных от цели импульсов предлагается излучать два или несколько лучей, разнесенных в горизонтальной плоскости на угол, соизмеримый по точности с шириной луча. Недостатком такого решения является то, что оно не приводит к скоростному увеличению темпа обновления информации и точности.
Другим близким аналогом заявляемого изобретения является «Корабельная трехкоординатная РЛС» ВМС США AN/SPS-48E [По данным справочника The Naval Institute Guide to World Naval Weapons Systems 1997-1998]. Система управления антенной подсистемой РЛС AN/SPS-48E позволяет осуществлять обзор пространства в вертикальной плоскости сканированием одного или группы лучей при круговом электромеханическом вращении антенного устройства в горизонтальной плоскости. Антенная подсистема антенного устройства РЛС AN/SPS-48E представляет собой волноводную щелевую решетку. Стабилизация луча диаграммы направленности антенного устройства по бортовой и килевой качкам осуществляется электронным способом. В зависимости от режима работы РЛС передающее устройство антенной подсистемы генерирует в соответствующих лучах высокую, среднюю и низкую излучаемую мощность. Основными недостатками РЛС AN/SPS-48E являются относительно низкий темп обновления радиолокационной информации и наличие интерференционных провалов при обнаружении целей, летящих под малыми углами места. Указанные недостатки могут привести к снижению устойчивости сопровождения, снижению и точности выдачи целеуказания.
Наиболее близким аналогом (прототипом) заявленного изобретения является система управления корабельной трехкоординатной радиолокационной станции (патент № 2254593 от 14.10.2003), содержащей высокочастотную часть приемопередающего антенного устройства Прибор 1, что соответствует блокам: (блок 35 соответствует блокам 1,2,3,4,5,6,7), включающего приемопередающие антенны первого и второго каналов, первое устройство суммирования и разделения каналов, антенну государственного опознавания, волноводное устройство с поворотным устройством и многоканальное устройство с вращающимся сочленениями, связанные с устройством приводов управления и стабилизации и через устройство переключения режимов «эквивалент-антенна» (блок 31 соответствует блоку 8) со вторым устройством суммирования и разделения частотных каналов (блок 30 соответствует блоку 9), который соответствующими двумя связями подключен к блокам приемник-передатчикам первого (блок 27 соответствует блокам 10,11,15,16,20,21) и второго (блок 29 соответствует блокам 13,14,18,19,23,24) каналов, а соответствующие входы блоков приемник-передатчиков первого и второго каналов через устройство формирования ЛЧМ сигналов (блок 32 соответствует блоку 26) связано с соответствующим выходом устройства отображения информации и управления режимами Прибор 3 (блок 26 соответствует блоку 27), при этом соответствующие выходы блоков приемник-передатчиков первого и второго каналов подключены к соответствующим входам блоков устройства обработки (блок 28 соответствует блокам 12,17,22,25), а выход устройства первого и второго каналов подсоединен к входу устройства детектирования и размножения сигналов (блок 33 соответствует блоку 29), связанного по интерфейсам с входами потребителей информации РЛС, а соответствующие информационные выходы устройства детектирования и размножения сигналов (блок 33 соответствует блоку 29) напрямую и через блок обработки информации (блок 34 соответствует блоку 28) подключены к соответствующим входам устройства отображения и управления режимами (блок 26 соответствует блоку 27) РЛС, связанного через устройство управления приводами (блок 30) с устройством приводов управления и стабилизации (блок 7).
Основными недостатками системы управления РЛС по патенту № 2254593 от 14.10.2003 являются обобщенное представление построения системы управления РЛС без необходимого конкретного схемотехнического и системотехнического построения составных частей РЛС. При создании системы управления РЛС по материалам патента № 2254593, для получения эффективности использования РЛС в целом декларируются возможности системы управления по автоматизации операций включения, взаимодействия различных устройств, контроля работоспособности, управлению сканированием, выбору вида сигнала и метода его обработки, применению различных режимов обзора пространства и алгоритмов перемещения лучей, формирования и обработки сигналов, а также для проведения регулировки приемопередающих устройств без излучения радиолокационных сигналов в эфир - возможность отключения передающих устройств от антенн и подключения их к эквиваленту.
Задачей, на решение которой направлено заявленное изобретение, является повышение эффективности функционирования и использования системы управления корабельной трехкоординатной РЛС для решения поставленной (стратегической) боевой задачи в сложной обстановке на театре военных действий при повышенном темпе обновления радиолокационной информации с высокими точностями измерениями координат цели и выдачи целеуказаний за счет подтверждения проектных данных, заданных ТЗ и установленных требуемым тактико-техническим характеристикам и необходимым функциональным возможностям.
Однако решение целевых задач требует не декларирования соответствия возможностей системы управления как идеи при создании конкретных образцов изделий с системами управления РЛС, а также подтверждения их конкретной технической реализуемости и установленных требуемым тактико-техническим характеристикам и необходимым функциональным возможностям. Обобщенное представление в данном случае не позволяет этого сделать, а промышленная применимость ограничена или даже невозможна. Так, возможности блоков 7 и 30 неочевидны без воплощения или исполнения технической конкретной реализации, а только раскрытие этих блоков и связей и их техническая реализация, уже приведет к появлению необходимых новых блоков, новых взаимосвязей и новых дополнительных свойств.
Техническим результатом является создание системы управления радиолокационных станций и радиолокационных комплексов при повышенном темпе обновления радиолокационной информации с высокими точностями измерения координат цели и выдачи целеуказаний, расширение функциональных возможностей и повышения оперативной готовности вывода РЛС на боевой режим работы, надежности, безопасности функционирования и точности определения координат.
Технический результат достигается на аналогичной по структуре построения высокочастотной части антенного устройства, как в прототипе, с двумя самостоятельными каналами в двух разнесенных поддиапазонах частот с двумя устройствами суммирования и разделения частотных каналов. Система управления на основе механической стабилизации оси вращения антенного устройства радиолокационных каналов и антенны системы государственного опознавания должна иметь возможность уменьшать или устранять влияние ошибок от качек корабля на характеристики РЛС. Высокие точности выдачи данных целеуказания достигаются за счет средств и приемов формирования диаграмм направленности антенного устройства с низким уровнем боковых лепестков, повышения в два раза темпа обновления информации, методов обработки информации для траекторного построения движения целей и статических и динамических свойств системы управления приводными устройствами и стабилизации РЛС. Обзор пространства осуществляется двумя радиолокационными каналами путем электронного сканирования лучей в вертикальной плоскости и механического вращения антенного устройства в горизонтальной плоскости. Сканирование в вертикальной плоскости осуществляется за счет изменения частоты излучаемых сигналов по специальным программам в соответствии с установленными режимами работы. Программы сканирования задают очередность следования лучей и виды зондирующих сигналов. Для реализации необходимого энергетического потенциала и требуемой точности измерения дальности применяются сложные зондирующие сигналы с линейной частотной модуляцией (ЛЧМ). Управление длительностью импульса, частотой повторения, мощностью и видом излучаемых сигналов осуществляется устройством отображения информации и управления режимами.
Антенное устройство РЛС представляет собой вращающийся в горизонтальной плоскости узел Прибора 1 и располагаемый на механически стабилизированной по бортовой и килевой качке платформе. Высокочастотная часть антенного устройства (35) включает антенны первого и второго каналов, развернутые излучающими поверхностями в противоположные стороны, первое устройство суммирования и разделения частотных каналов, антенну государственного опознавания, многоканальное вращающее сочленение, волноводное поворотное устройство и устройство привода ГВ. Приводы стабилизации размещены на неподвижной части Прибора 1. Волноводное поворотное устройство антенного устройства (35) через устройство переключения режимов «эквивалент-антенна» (31), включающее переключатель и эквивалент, соединено со вторым устройством суммирования и разделения частотных каналов (30), которое по соответствующим двум связям подсоединено к устройствам приемников-передатчиков первого (27) и второго (29) каналов, а соответствующие входы устройств приемников-передатчиков первого и второго каналов через устройство формирования ЛЧМ сигнала (32) связано с соответствующим выходом устройства отображения и управления режимами Прибора 3 (26), а соответствующие выходы устройств приемников-передатчиков первого (27) и второго (29) каналов подключены к соответствующим входам устройства обработки (28), выход которого подключен к входу устройства детектирования и размножения сигналов (33), связанного с потребителями информации РЛС, а соответствующие информационные выходы устройства детектирования и размножения сигналов непосредственно и через устройство обработки информации (34) подключены к устройству отображения и управления режимами Прибора 3 (26). Электронное сканирование лучей в зонах обзора по углу места обеспечивается за счет дискретного изменения несущей частоты каждого из каналов. Для проведения работ без излучения сигналов в эфир при регулировке, настройке, тестировании и контроле на разных стадиях жизненного цикла РЛС как изделия предприятия предусмотрена возможность отключения передающих устройств от антенн и подключение их к эквиваленту с помощью устройства переключения «эквивалент-антенна» (31), включающее переключатель и эквивалент.
Электронное сканирование лучей в зонах обзора по углу места обеспечивается за счет дискретного изменения несущей частоты каждого из каналов.
Отраженные от целей радиолокационные сигналы принимаются антеннами антенного устройства (35) проходят первое устройство суммирования и разделения частотных каналов, устройство переключения режимов «эквивалент-антенна» (31), включающее переключатель и эквивалент, второе устройство суммирования и разделения частотных каналов (30) и поступают в устройства приемников-передатчиков первого (27) и второго (29) каналов, с выходов которых сигналы передаются в устройство обработки (28). После этого сигналы поступают на устройство детектирования и размножения сигналов (33) и далее на устройство обработки информации (34) и устройство отображения информации и управления режимами радиолокационной станции (26) Прибор 3 и к другим потребителям информации. Устройство обработки информации (34) является автоматизированным рабочим местом (АРМ) оператора РЛС для ввода исходных данных и сопровождения целей. В состав устройства отображения информации и управления режимами радиолокационной станции (26) Прибор 3 входят пульт управления и блок отображения информации.
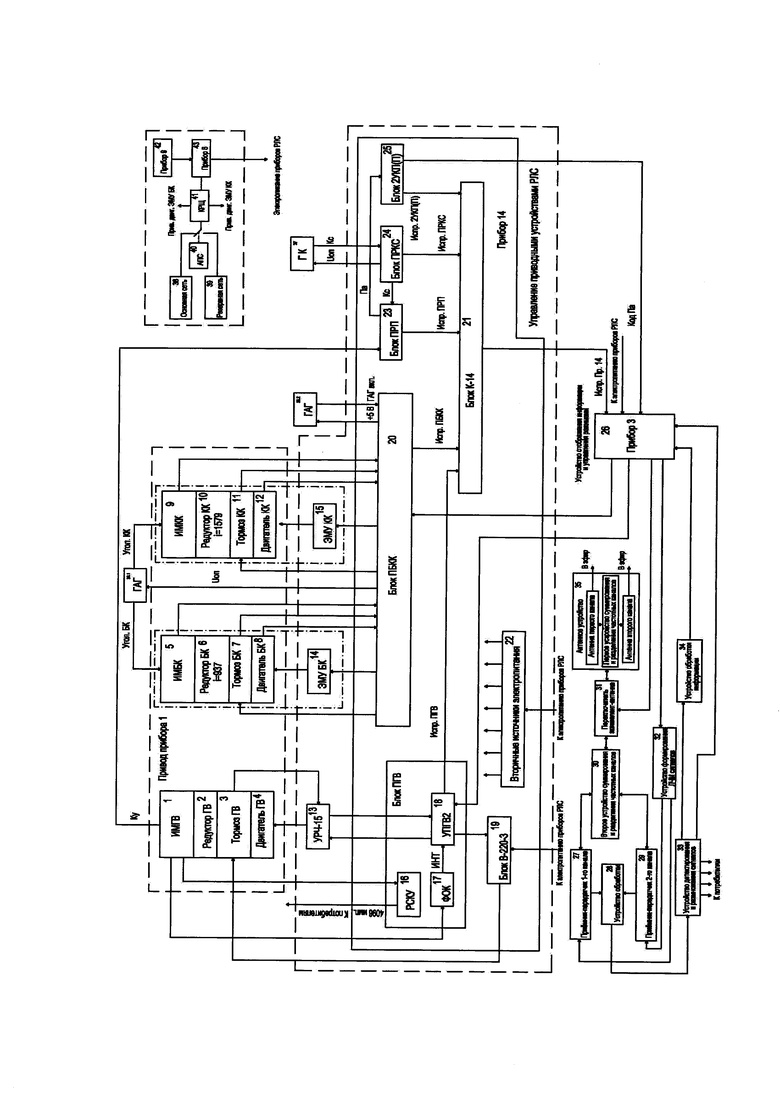
Управление режимами вращения и стабилизации в системе управления РЛС осуществляется за счет следующего: введены гироазимутгоризонт (ГАГ) (36.1 и 36.2) углов бортовой (БК) и килевой качки (КК), гирокомпас ГК (37), система электропитания РЛС, содержащая корабельный распределительный щит (КРЩ) (41), вход которого через нормально-замкнутые контакты автомата переключения сети (40) подключен к основной сети (38) и через нормально-разомкнутые контакты к резервной сети (39), а выход КРЩ через прибор 8 к электропитанию приборов РЛС и выходу Прибора 9, при этом система управления приводными устройствами РЛС содержит привод Прибора 1 с усилителями УРЧ-15 (13) и электромашинными усилителями БК (14) и КК (15) и Прибор 14, включающий устройство управления НТВ (16…18), содержащие блоки: размножения сигналов КС (16), формирования отметки курса (17) и управление УПГВ2 (18), и привод стабилизации, содержащий блоки: ПБКК (20), привод размножения пеленга (23), привод размножения КС (24), углокодовый преобразователь (25), блок контроля и индикации К-14 (21), вторичные источники электропитания (22) и блок нестабилизированного источника постоянного напряжения 220 В (В-220-3) (19), одноименные входные шины питания подключены к выходам Прибора 8 (43) системы электропитания, а выходы источников электропитания - вторичных источников электропитания (22) и блока нестабилизированного источника постоянного напряжения 220В (В-220-3) (19) связаны шинами питания с соответствующими входными клеммами потребителей РЛС, при этом приводная часть Прибора 1 содержит три части системы управления антенным устройством, состоящие из канала НТВ, содержащего двигатель ГВ (4), управляемый тормоз ГВ (3), редуктор ГВ (2), индикаторный механизм ГВ (1) и двух аналогичных каналов приводов стабилизации БК и КК, каждый из которых включает двигатель БК и КК, управляемый тормоз БК и КК, редуктор соответствующего канала БК и КК, соединенные с соответствующим объектом управления антенного устройства, и индикаторный механизм соответствующего канала БК (5) и КК (9), при этом выход индикаторного механизма привода ГВ (1) линией связи «курсовой угол» (Ку) подключен к входу блока привода размножения пеленга (23) Прибора 14, два других выхода индикаторного механизма привода горизонтального вращения (1) связаны соответственно - один через блок размножителя сигналов КУ (16) блока ПГВ с потребителями, а другой - через блок формирователя отметки курса (17) блока ПГВ по линии связи импульса начала торможения к блоку управления приводом горизонтального вращения (18) блока ПГВ, а выход состояния тормоза ГВ (3) подключен через соответствующий вход усилителя УРЧ-15 (13) с входом блока управления приводом горизонтального вращения УПГВ2 (18) блока ПГВ, выход которого через блок нестабилизированного источника постоянного напряжения 220В (В-220-3) (19) подсоединен к управляющему входу тормоза ГВ (3), а управляющий вход блока управления приводом ГВ (18) связан через устройство регулирования частоты УРЧ-15 (13) с двигателем ГВ (4) системы управления антенным устройством, при этом соответствующие входы индикаторных механизмов каждого канала приводов стабилизации БК (5) и КК (9) системы управления антенным устройством (приводная часть Прибора 1) подключены к соответствующим информационным выходам «угол БК» и «угол КК» гироазимутогоризонта (ГАГ) (36.1), вход которого связан с выходом опорного напряжения Uоп блока приводов БК и КК (20), входящего в состав Прибора 14 системы управления приводными устройствами РЛС, а соответствующие входы блока привода БК и КК (20) подключены к соответствующим выходам индикаторных механизмов БК (5) и КК (9), состояния тормозов БК (7) и КК (11) и двигателей БК (8) и КК (12) каждого канала приводов стабилизации БК и КК системы управления антенным устройством (приводная часть Прибора 1), а соответствующие выходы сигналов управления каждого канала стабилизации блока приводов БК и КК (20) подсоединены через соответствующие электромашинные усилители БК (14) и КК (15) системы управления антенным устройством к соответствующим входам двигателей БК (8) и КК (12) каждого канала приводов стабилизации БК и КК системы управления антенным устройством (приводная часть Прибора 1) и соответствующие выходы питания тормозов БК (7) и КК (11) блока приводов БК и КК (20) связаны с соответствующими входами питания тормозов БК (7) и КК (11), а выходная клемма с напряжением «+5 В» блока привода БК и КК (20) подсоединена к входу «определения состояния включения» ГАГ (36.2), выход которого соединен с входом «ГАГ вкл.» блока приводов бортовой и килевой качки ПБКК (20), при этом выход блока привода размножения курса своего ПРКС (24) по линии связи (КС) соединен с входом блока привода размножения пеленга ПРП (23) Прибора 14, выход которого по аналоговой линии пеленг антенны (Па) связан с входом блока углокодового преобразователя (25), преобразующего аналоговый сигнал Па в код пеленга антенны (Код Па), а выход блока углокодового преобразователя (25) по линии связи «Код пеленга антенны» подключен к входу устройства отображения и управления режимами (Прибор 3) (26), при этом выход опорного напряжения (Uоп) блока привода размножения курса своего ПРКС (24) связан с входом гирокомпаса (ГК) (37), а выход (КС) гирокомпаса (37) подсоединен к входу блока привода размножения КС (24), причем выходы сигналов исправности (Испр): Испр. ПГВ, Испр. ПБКК, Испр. ПРП, Испр. ПРКС, Испр. 2УКП(П) блоков ПГВ, ПБКК(20), ПРП (23), ПРКС (24), 2УКП(П) (25) подключены к соответствующим входам блока контроля и индикации блока К-14 (21) Прибора 14, в котором соответствующим образом объединяются, выход блока контроля и индикации блока К-14 (21) Прибора 14 подключен к соответствующему входу Прибора 3 (26) по линии связи «Испр. Пр. 14», а соответствующие выходы сигналов управления устройства отображения и управления режимами Прибора 3 (26) подсоединены к соответствующим входам блока (УПГВ2) (18) устройства управления приводом горизонтального вращения блока ПГВ, блока приводов бортовой и килевой качки (20) и устройства переключения режимов «эквивалент-антенна» (31), включающее переключатель и эквивалент.
Основные устройства системы управления РЛС и их взаимодействие показаны на чертеже. Система управления РЛС состоит из следующих устройств в порядке, указанных на чертеже:
1 - ИМГВ - индикаторный механизм горизонтального вращения;
2 - Редуктор горизонтального вращения (ГВ);
3 - Тормоз горизонтального вращения (ГВ);
4 - Двигатель горизонтального вращения (ГВ);
5 - ИМБК - индикаторный механизм бортовой качки (БК);
6 - Редуктор бортовой качки (БК);
7 - Тормоз бортовой качки (БК);
8 - Двигатель бортовой качки (БК);
9 - ИМКК - индикаторный механизм килевой качки;
10 - Редуктор килевой качки (КК);
11 - Тормоз килевой качки (КК);
12 - Двигатель килевой качки (КК);
13 - УРЧ-15 - устройство регулирования частоты;
14 - ЭМУ БК - электромашинный усилитель бортовой качки;
15 - ЭМУ КК - электромашинный усилитель килевой качки;
16 - РСКУ - размножение сигналов курсового угла;
17 - ФОК - формирование отметки курса;
18 - УПГВ 2 - управление приводом горизонтального вращения;
19 - Блок В-220-3 - нестабилизированный источник постоянного напряжения 220В;
20 - Блок ПБКК - привод бортовой и килевой качек;
21 - Блок К-14 - блок контроля и индикации исправности прибора 14;
22 - Вторичные источники электропитания;
23 - Блок ПРП - привод размножения пеленга;
24 - Блок ПРКС - привод размножения «курса своего»;
25 - Блок 2УКП (П) - углокодовый преобразователь пеленга;
26 - Прибор 3 - устройство отображения информации и управления режимами радиолокационной станции;
27 - Приемник-передатчик 1-го канала;
28 - Устройство обработки;
29 - Приемник-передатчик 2-го канала;
30 - Второе устройство суммирования и разделения частотных каналов;
31 - Устройство переключения режимов «эквивалент»-«антенна»;
32 - Устройство формирования линейной частотной модуляцией (ЛЧМ) сигналов;
33 - Устройство детектирования и размножения сигналов;
34 - Устройство обработки информации;
35 - Высокочастотная часть антенного устройства (Прибор 1) и первое устройство суммирования и разделения частотных каналов;
36.1, 36.2 - ГАГ - гироазимутогоризонт;
37 - ГК - гирокомпас;
38 - Основная сеть;
39 - Резервная сеть;
40 - АПС - автомат переключения сети;
41 - КРЩ - корабельный распределительный щит;
42 - Прибор 9;
43 - Прибор 8.
Вставка
Функциональное назначение элементов приводной части РЛС Привод прибора 1 - содержит блоки с 1 по 12. Обеспечивает горизонтальное вращение и стабилизацию в плоскости горизонта антенного устройства.
1. ИМГВ - индикаторный механизм горизонтального вращения. Содержит инкрементный фотоэлектрический датчик углового положения антенны и синусно-косинусные датчики углового положения антенны.
2. Редуктор ГВ - понижающий редуктор привода ГВ с передаточным отношением 250.
3. Тормоз ГВ - электромагнитный тормоз вала двигателя ГВ. Принцип действия - катушка соленоида с подвижным сердечником. В обесточенном состоянии под воздействием пружины блокирует вал двигателя ГВ. При пропускании тока через катушку тормоза освобождает вал двигателя ГВ и вращение вала двигателя через редуктор ГВ приводит антенну в круговое вращение.
4. Двигатель ГВ - трехфазный асинхронный двигатель мощностью 7,5 кВт и с номинальной частотой вращения 3000 об/мин. Номинальное напряжение 380 В.
5. ИМБК - индикаторный механизм бортовой качки. Содержит СКВТ - приемник и шкалы грубого и точного отсчетов углов крена корабля. Содержит также сельсин-датчик угла крена.
6. Редуктор БК - понижающий редуктор с передаточным отношением 937.
7. Тормоз БК - тормоз вала двигателя бортовой качки. Принцип действия аналогичен тормозу ГВ.
8. Двигатель БК - коллекторный двигатель постоянного тока номинальной мощностью 760 Вт при номинальной частоте вращения 2500 об/мин. Содержит обмотку независимого возбуждения и тахогенератор постоянного тока.
9. ИМКК - индикаторный механизм килевой качки. Содержит СКВТ - приемник и шкалы грубого и точного отсчетов дифферента корабля. Содержит также сельсин-датчик угла дифферента.
10. Редуктор КК - понижающий редуктор с передаточным отношением 1579.
11. Тормоз КК - тормоз вала двигателя килевой качки. Принцип действия аналогичен тормозу ГВ.
12. Двигатель КК - двигатель, полностью идентичный двигателю БК.
Устройства управления приводной частью прибора 1 - содержат блоки с 13 по 25. Блоки 13…15 являются частью РЛС. Блоки с 16 по 25 входят в состав прибора 14 ЛП2.300.016-05.
13. УРЧ-15 - устройство регулирования частоты вращения двигателя ГВ.
14. ЭМУ БК - электромашинный усилитель бортовой качки. Управляет вращением вала двигателя БК.
15. ЭМУ КК - электромашинный усилитель двигателя КК, полностью идентичный ЭМУ БК.
16. РСКУ - модуль размножения сигналов курсового угла блока ПГВ (привода горизонтального вращения). Принимает сигналы фотоэлектрического датчика ИМГВ и преобразует их в последовательность 4096 импульсов ТТЛ уровней для внешних потребителей.
17. Модуль ФОК - модуль формирования отметки курса своего блока ПГВ. Принимает синусно-косинусные составляющие своего СКВТ механизма ИМГВ и формирует импульс ИНТ (импульс начала торможения) ТТЛ - уровня в положении 3500 курсового угла антенны.
18. Модуль УПГВ2 - модуль управления приводом горизонтального вращения блока ПГВ. Формирует сигналы управления выходной частотой блока УРЧ-15, управление режимом остановки антенны в положении 0 курсового угла и включением-выключением блока В-220-3. Формирует сигнал исправности привода ГВ.
19. Блок В-220-3 - нестабилизированный выпрямитель с выходным напряжением 220В постоянного тока и номинальным током нагрузки 3 А. Предназначен для управления включением-выключением тормоза ГВ.
20. Блок ПБКК - блок управления приводами бортовой и килевой качек. Принимает сигналы углового рассогласования с принимающих СКВТ механизмов ИМБК, ИМКК, усиливает их, преобразует в управляющие сигналы постоянного тока, усиливает эти сигналы и выдает на управляющие обмотки электромашинных усилителей ЭМУ БК, ЭМУ КК. Принимает сигналы демпфирования по скорости от тахогенераторов двигателей БК и КК. Принимает сигналы демпфирования по току якорей двигателей БК и КК. Контролирует срабатывание тормозов БК и КК. Контролирует наличие тока возбуждения двигателей БК и КК. Выдает опорное напряжение на дающие СКВТ ГАГ. Контролирует включенное состояние ГАГ. Формирует сигнал исправности приводов БК и КК.
21. Блок К-14 - блок контроля исправности всех частей прибора 14. Анализирует сигналы исправности блоков ПГВ, ПБКК, ПРП, ПРКС, 2УКП(П) и формирует общий сигнал исправности прибора 14.
22. Вторичные источники электропитания - получают напряжение 1 ~ 400 Гц 220В от прибора электропитания РЛС и преобразуют его в стабилизированные постоянные напряжения 5В, ± 6,3В, ± 12,6В, ± 27В, ± 110В, необходимые для работы прибора 14.
23. Блок ПРП - блок приводов размножения пеленга антенны. Суммирует аналоговые сигналы СКВТ курсового угла от ИМГВ прибора 1 и курса своего от блока ПРКС. Полученную сумму углов Ку и Кс, являющуюся пеленгом антенны Па, в виде аналоговых сигналов с частотой 400 Гц выдает на блок 2УКП(П). Формирует сигнал исправности ПРП.
24. Блок ПРКС - блок приводов размножения курса своего. Выдает опорное напряжение для дающего СКВТ ГК, отрабатывает сигнал рассогласования со своего принимающего СКВТ и формирует синусно-косинусные составляющие курса своего. Формирует сигнал исправности ПРКС.
25. Блок 2УКП(П) - блок углокодового преобразователя пеленга. Принимает аналоговый сигнал пеленга антенны (Па) в виде синусоидального напряжения с частотой 400 Гц и преобразует его в 13-разрядный прямой двоичный код Па. Формирует сигнал исправности 2УКП(П).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления корабельной трёхкоординатной радиолокационной станцией, антенным устройством и приводной частью для неё | 2022 |
|
RU2788578C1 |
| СПОСОБ ЭЛЕКТРОННОЙ СТАБИЛИЗАЦИИ ЗОНЫ ОБЗОРА РЛС | 2007 |
|
RU2343532C1 |
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| АНТЕННАЯ СИСТЕМА СО СТАБИЛИЗИРОВАННОЙ ПЛОСКОСТЬЮ ВРАЩЕНИЯ ОБЗОРНОГО КОРАБЕЛЬНОГО РАДИОЛОКАТОРА | 2005 |
|
RU2301482C2 |
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ КОРАБЕЛЬНОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЫ | 2008 |
|
RU2373550C1 |
| КОРАБЕЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2293405C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Способ отождествления целевой информации трехкоординатного стабилизированного и двухкоординатного нестабилизированного источников, располагаемых на качающемся носителе | 2023 |
|
RU2816259C1 |
| КОРАБЕЛЬНЫЙ АРТИЛЛЕРИЙСКИЙ КОМПЛЕКС С РЕЖИМОМ КОМПЕНСАЦИИ ВЛИЯНИЯ ДЕФОРМАЦИЙ КОРПУСА КОРАБЛЯ | 2013 |
|
RU2542821C1 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ АНТЕННЫХ ПОСТОВ И ПРИБОРОВ СУДОВОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2001 |
|
RU2204873C1 |
Изобретение относится к области систем управления радиолокационной техники, в частности к системам управления корабельной радиолокационной станцией (РЛС) и радиолокационным комплексам (РЛК), и может использоваться для обнаружения и сопровождения воздушных и надводных целей, освещения воздушной и надводной обстановки, траекторной обработки информации и выдачи целеуказаний. Техническим результатом является создание системы управления радиолокационной станцией и радиолокационным комплексом, обеспечивающей функционирование при повышенном темпе обновления радиолокационной информации с высокими точностями измерениями координат цели и выдачи целеуказаний, расширение функциональных возможностей и повышение оперативной готовности вывода комплекса РЛС/РЛК на боевой режим работы, надежности, безопасности функционирования и точности определения координат. Заявленная система управления корабельной трехкоординатной радиолокационной станцией содержит высокочастотную часть антенного устройства в составе антенн первого и второго каналов, развернутых излучающими поверхностями в противоположные стороны, первого устройства суммирования и разделения частотных каналов, антенны государственного опознавания, многоканального вращающего сочленения, волноводного поворотного устройства и устройства приводов управления и стабилизации. При этом волноводное поворотное устройство антенного устройства (35) через устройство переключения режимов «эквивалент-антенна» (31) соединено со вторым устройством суммирования и разделения частотных каналов (30), которое подсоединено к устройствам приемников-передатчиков первого (27) и второго (29) каналов, а входы устройств приемников-передатчиков первого и второго каналов через устройство формирования линейной частотной модуляцией сигналов (32) связаны с выходом устройства отображения и управления режимами Прибор 3 (26). Выходы устройств приемник-передатчиков первого (27) и второго (29) каналов подсоединены к входам устройства обработки (28), выход которого подключен к входу устройства детектирования и размножения сигналов (33), связанного с потребителями информации РЛС. Информационные выходы устройства детектирования и размножения сигналов непосредственно и через устройство обработки информации (34) подключены к устройству отображения и управления режимами Прибор 3 (26), соединенного с переключателем «эквивалент-антенна» (31). В систему введены гироазимутогоризонт ГАГ (36.1, 36.2) углов бортовой качки (БК) и килевой качки (КК), гирокомпас ГК (37), система электропитания РЛС, содержащая корабельный распределительный щит (41), вход которого подключен к основной сети (38) и к резервной сети (39), а выход корабельного распределительного щита (41) через прибор 8 – к электропитанию приборов РЛС и выходу Прибора 9. 1 з.п. ф-лы, 1 ил.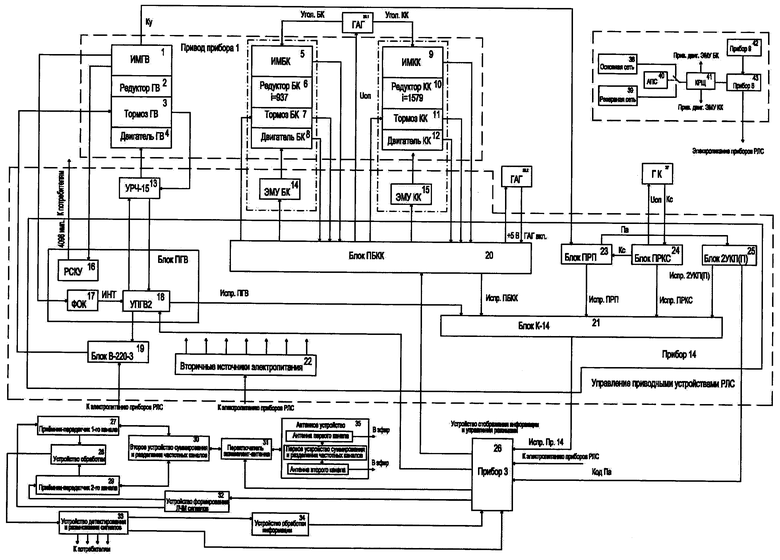
1. Система управления корабельной трехкоординатной радиолокационной станцией, содержащей высокочастотную часть антенного устройства в составе антенн первого и второго каналов, развернутых излучающими поверхностями в противоположные стороны, первого устройства суммирования и разделения частотных каналов, антенны государственного опознавания, многоканального вращающего сочленения, волноводного поворотного устройства и устройства приводов управления и стабилизации, при этом волноводное поворотное устройство антенного устройства через устройство переключения режимов «эквивалент-антенна» соединено со вторым устройством суммирования и разделения частотных каналов, которое по соответствующим двум связям подсоединено к устройствам приемников-передатчиков первого и второго каналов, а соответствующие входы устройств приемников-передатчиков первого и второго каналов через устройство формирования линейной частотной модуляцией сигналов связано с соответствующим выходом устройства отображения и управления режимами Прибор 3, а соответствующие выходы устройств приемник-передатчиков первого и второго каналов подсоединены к соответствующим входам устройства обработки, выход которого подключен к входу устройства детектирования и размножения сигналов, связанного с потребителями информации РЛС, а соответствующие информационные выходы устройства детектирования и размножения сигналов непосредственно и через устройство обработки информации подключены к устройству отображения и управления режимами Прибор 3, соединенного с переключателем «эквивалент-антенна», отличающаяся тем, что в нее введены гироазимутогоризонт (ГАГ) углов бортовой качки (БК) и килевой качки (КК), гирокомпас (ГК), система электропитания РЛС, содержащая корабельный распределительный щит, вход которого через нормально-замкнутые контакты автомата переключения сети подключен к основной сети и через нормально-разомкнутые контакты к резервной сети, а выход корабельного распределительного щита через прибор 8 к электропитанию приборов РЛС и выходу Прибора 9.
2. Система управления корабельной трехкоординатной радиолокационной станцией по п.1, отличающаяся тем, что она содержит привод Прибора 1, систему управления приводными устройствами РЛС с усилителями УРЧ-15 и электромашинными усилителями (ЭМУ) БК и КК и Прибор 14, включающий устройство управления приводом горизонтального вращения (блок ПГВ), содержащее блоки: размножения сигналов курса своего (Кс), формирования отметки курса и управления приводом горизонтального вращения УПГВ2, и блоки – привод БК и КК, привод размножения пеленга, привод размножения Кс, углокодовый преобразователь 2УКП(П), блок контроля и индикации К-14, вторичные источники электропитания и блок нестабилизированного источника постоянного напряжения 220В (В-220-3), одноименные входные шины питания подключены к выходам Прибора 8 системы электропитания, а выходы источников электропитания – вторичных источников электропитания и блока нестабилизированного источника постоянного напряжения 220В (В-220-3) связаны шинами питания с соответствующими входными клеммами потребителей РЛС, при этом приводная часть Прибора 1 содержит три части системы управления антенным устройством, состоящие из канала привода горизонтального вращения, содержащего двигатель горизонтального вращения, управляемый тормоз горизонтального вращения, редуктор горизонтального вращения, индикаторный механизм горизонтального вращения, и двух аналогичных каналов приводов стабилизации БК и КК, каждый из которых включает двигатель БК и КК, управляемый тормоз БК и КК, редуктор соответствующего канала БК и КК, соединенные с соответствующим объектом Прибора 1, и индикаторные механизмы соответствующего канала БК и КК, при этом выход индикаторного механизма привода горизонтального вращения линией связи «курсовой угол» подключен к входу блока привода размножения пеленга Прибора 14, два других выхода индикаторного механизма привода горизонтального вращения связаны соответственно – один через блок размножения сигналов курсового угла блока привода горизонтального вращения с потребителями, а другой – через блок формирователя отметки курса блока ПГВ по линии связи «импульса начала торможения» к блоку УПГВ2 блока ПГВ, а выход состояния тормоза горизонтального вращения подключен через соответствующий вход усилителя УРЧ-15 с входом блока УПГВ2 блока ПГВ, выход которого через блок нестабилизированного источника постоянного напряжения 220В (В-220-3) подсоединен к управляющему входу тормоза горизонтального вращения, а управляющий вход блока УПГВ2 связан через устройство регулирования частоты УРЧ-15 с двигателем горизонтального вращения системы управления антенным устройством, при этом соответствующие входы индикаторных механизмов каждого канала приводов стабилизации БК и КК и системы управления приводной частью Прибора 1 подключены к соответствующим информационным выходам «угол БК» и «угол КК» гироазимутогоризонта «ГАГ», вход которого связан с выходом опорного напряжения U0n блока приводов БК и КК, входящего в состав Прибора 14 системы управления приводными устройствами РЛС, а соответствующие входы блока привода БК и КК подключены к соответствующим выходам индикаторных механизмов БК и КК, состояния тормозов БК и КК и двигателей БК и КК каждого канала приводов стабилизации БК и КК системы управления антенным устройством (приводная часть Прибора 1), а соответствующие выходы сигналов управления каждого канала стабилизации блока приводов БК и КК подсоединены через соответствующие ЭМУ БК и ЭМУ КК системы управления антенным устройством к соответствующим входам двигателей БК и КК каждого канала приводов стабилизации БК и КК системы управления приводной частью Прибора 1 и соответствующие выходы питания тормозов БК и КК блока приводов БК и КК (ПБКК) связаны с соответствующими входами питания тормозов БК и КК, а выходная клемма с напряжением «+5В» ПБКК подсоединена к входу «определения состояния включения» гироазимутогоризонта «ГАГ», выход которого соединен с входом «ГАГ вкл.» ПБКК, при этом выход блока привода размножения Кс по линии связи Кс соединен с входом блока привода размножения пеленга Прибора 14, выход которого по аналоговой линии «Пеленг антенны» (Па) связан с входом блока 2УКП(П), преобразующего аналоговый сигнал Па в «Код пеленга антенны» (Код Па), а выход блока 2УКП(П) по линии связи Код Па подключен к входу устройства отображения и управления режимами Прибор 3, при этом выход «опорного напряжения» (UОП) блока привода размножения Кс связан с входом ГК, а выход (Кс) ПС подсоединен к входу блока ПРКс, причем выходы сигналов исправности (Испр): Испр. ПГВ, Испр. ПБКК, Испр. ПРП, Испр. ПРКС, Испр. 2УКП(П) подключены к соответствующим входам блока контроля и индикации блока К-14 Прибора 14, в котором соответствующим образом объединяются, выход блока контроля и индикации блока К-14 Прибора 14 подключен к соответствующему входу Прибора 3 по линии связи «Испр. Прибора 14», а соответствующие выходы сигналов управления устройства отображения и управления режимами Прибора 3 подсоединены к соответствующим входам блока УПГВ2 блока ПГВ, блока ПБКК и устройства переключения режимов «эквивалент-антенна», включающее переключатель и эквивалент.
| КОРАБЕЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ И АНТЕННОЕ УСТРОЙСТВО ДЛЯ НЕЕ | 2003 |
|
RU2254593C1 |
| Устройство для непрерывного получения раствора из быстро твердеющих вяжущих | 1947 |
|
SU76464A1 |
| RU 71826 U1, 20.03.2008 | |||
| Амортизатор к прессу типа "Идеал" с кулиссой | 1936 |
|
SU51754A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ АНТЕННОГО ПОСТА РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2587715C1 |
| WO 2007021217 A1, 22.02.2007 | |||
| CN 104166138 A, 26.11.2014 | |||
| Прибор для отбора газовых проб в скважинах | 1947 |
|
SU83797A1 |

