Изобретение относится к системам автоматического управления, в частности к устройствам для автоматического управления технологическими процессами в объектах с нелинейной статической характеристикой.
Известны устройства для автоматического управления технологическими процессами в объектах с нелинейной статической характеристикой «вход - выход, содержащие датчик приращения выходной координаты процесса, подсоединенный через элемент с эталонной зоной нечувствительности к реле выбора знака команд управления, а также логические элементы «И, «ИЛИ, «НЕ, триггер реверса и исполнительный механизм управления объектом.
Известные устройства не позволяют оптимизировать параметры процессов, происходящих в широком классе объектов (например, горение в топках паровых котлов), статическая характеристика «вход - выход которых состоит из двух ветвей с разными по абсолютной величине наклонами, и точка перехода с одной ветви на другую соответствует оптимальному режиму процесса. Последствие того, что статическая характеристика процесса в известных устройствах преобразуется в экстремальную, причем значение входной переменной, соответствующее точке экстремума, не совпадает со значением входной переменной, соответствующей оптимальной точке исходной характеристики «вход - выход оптимизируемого процесса.
Предложенное устройство позволяет оптимизировать параметры технологических процессов в упомянутом классе объектов, так как в нем дополнительно установлен логический блок задания времени движения исполнительного механизма в сторону ветви статической характеристики объекта с малым наклоном, вход которого подключен к реле выбора знака команд управления, связанному с одним из единичных входов триггера реверса, второй единичный вход которого подключен
к выходу логического блока задания этого времени движения, а выходы триггера реверса связаны непосредственно и через логический элемент «И с исполнительным механизмом управления объектом.
При отсутствии внешних возмущений поиск оптимального режима в предложенном устройстве автоматически прекращается за счет того, что оно также -снабжено логическим блоком задания времени движения исполнительного механизма в оптимальную точку статической характеристики объекта, причем входы этого логического блока подсоединены к выходам триггера реверса, а выход через логические элементы «ИЛИ и «И связан с
Кроме того, в предложенном устройстве установлен датчик его поверочного запуска, входы которого параллельно подключены к соответствуюш,ему выходу триггера реверса и выходу логического блока задания времени движения исполнительного механизма в оптимальную точку статической характеристики объекта, а выход датчика поверочного запуска через логические элементы «НЕ и «ИЛИ связан с логическим элементом «И, подсоединенным к исполнительному механизму управления объектом. Это позволяет улучшить качество слежения за перемен ением оптимальной точки статической характеристики объекта.
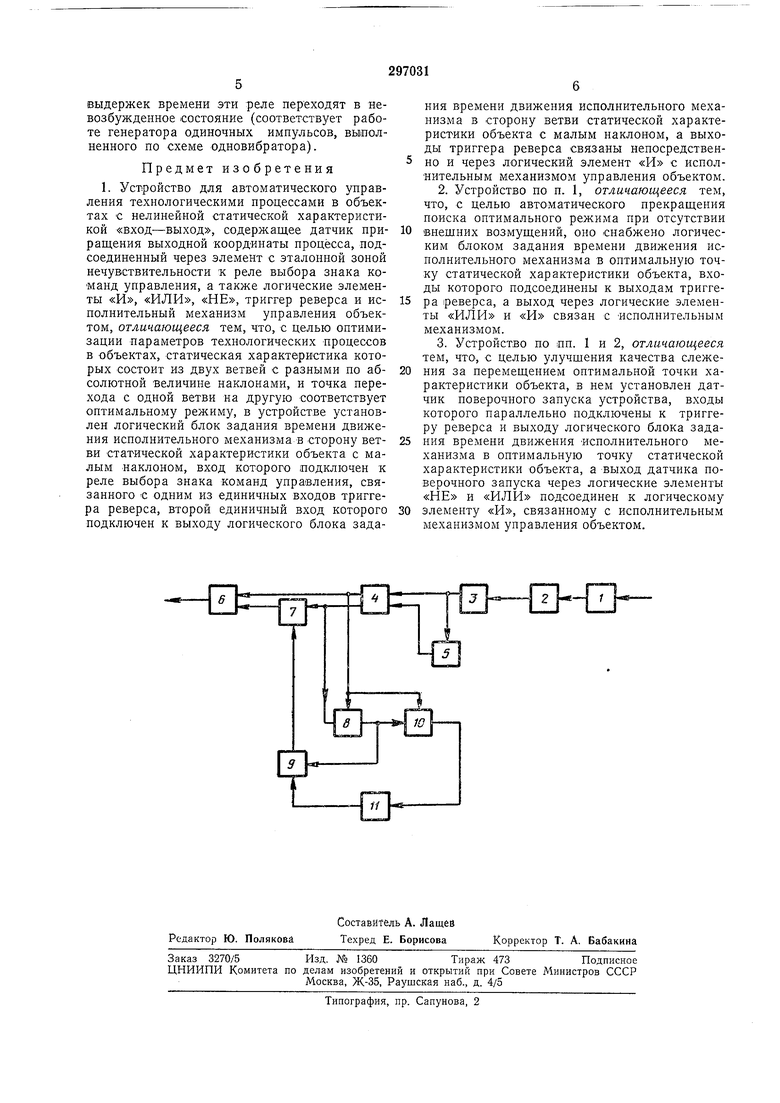
На чертеже представлена структурная схема предложенного устройства для автоматического управления технологическими процессами в объектах с нелинейной статической характеристикой, где 1 - датчик приращения выходной координаты процесса; 2 - элемент с эталонной зоной нечувствительности; 3 - реле выбора знака команд управления; 4- триггер реверса; 5 -логический блок задания времени движения исполнительного механизма в сторону ветви статической характеристики объекта с малым наклоном; 6 - исполнительный механизм; 7 - логический элемент 8 - логический блок задания времени движения исполнительного механизма в оптимальную точку статической характеристики объекта; 9 - логический элемент
10- датчик поверочного запуска устройства;
11- логический элемент «НЕ.
Датчик 1 приращения выходной координаты процесса соединен со входом элемента 2 с эталонной зоной нечувствительности, выход которого соединен со входом реле 3 выбора знака команд управления. Выход этого реле подсоединен к одному из единичных входов триггера реверса 4 и к входу логического блока 5 задания времени движения исполнительного механизма в сторону ветви статической характеристики объекта с малым наклоном, выход которого подключен к другому входу триггера реверса. Первый выход триггера реверса, соответствующий движению исполнительного механизма 6 в сторону ветви характеристики с большим наклоном, соединен как с исполнительным механизмом (через элемент «И 7) так и со входом логического блока 8 задания времени движения исполнительного механизма в оптимальную точку, выход которого подключен к элементу «ИЛИ 9 и к датчику 10 поверочного запуска устройства. Второй выход триггера реверса, соответствующий движению в сторону ветви характеристики с малым наклоном, подсоединен к иснолнительному механизму непосредственно.
Выход датчика поверочного запуска через логический элемент «НЕ 11 и упомянутые элементы «ИЛИ и «И связан с исполнительным механизмом управления объектом.
тельный механизм изменяет входную координату объекта в сторону, соответствующую ветви с ббльшим наклоном, то, начиная с некоторого момента времени, на выходе датчика приращения появляется сигнал, соответствующий резкому изменению выходной координаты объекта. Этот сигнал превышает эталонную зону нечувствительности, установленную на элементе с зоной нечувствительности,
и вызывает срабатывание реле выбора знака команд управления. Это реле обеспечивает переброс триггера реверса в противоположное состояние, соответствующее направленному движению исполнительного механизма в сторону ветви статической характеристики «вход-выход с малым наклоном. сЗдновременно запускается реле времени блока задания времени движения исполнительного механизма в этом направлении, которое после
окончания установленной на нем выдержки времени перебрасывает триггер реверса в состояние, соответствующее движению исполнительного механизма в сторону ветви с большим наклоном.
С перебросом триггера реверса запускается реле времени блока задания времени движения в оптимальную точку, которое в течение установленной на нем выдержки времени подает сигнал через первый вход элемента
«ИЛИ на элемент «И. При этОМ исполнительный механизм изменяет входную координату процесса в сторону, соответствующую ветви с большим наклоном, причем после окончания выдержки времени на этом реле
времени через схему «ИЛИ снимается сигнал со схемы «И, и исполнительный механизм останавливается. Одновременно включается реле времени датчика поверочного запуска, в течение выдержки времени которого
сигнал с него через элементы «НЕ и «ИЛИ на элемент «И не подается, и исполнительный механизм по-прежнему отключен. После окончания выдержки этого реле времени через элементы «НЕ и «ИЛИ подается сигнал
на элемент «И.
При этом исполнительный механизм снова начинает изменять входную координату процесса в сторону, соответствующую с большим наклоном, до момента перехода через точку перегиба статической характеристики, после чего цикл повторяется. Если в течение заданной выдержки времени реле блока задания времени движения в оптимальную точку или датчика поверочного запуска происходит срабатывание знакового реле и переброс триггера реверса в состояние, соответствующее движению в сторону ветви с малым наклоном, то сигналом, поступающим на оба эти реле времени с одного из выходов триггера, осуществляется сброс их обоих. Используемые в устройстве реле времени представляют собой элементы, которые переходят в возбужденное состояние только после того, как на их входы поступают запускающие имвыдержек времени эти реле переходят в невозбужденное состояние (соответствует работе генератора одиночных импульсов, выполненного по схеме одновибратора).
Предмет изобретения
1. Устройство для автоматического управления технологическими процессами в объектах с нелинейной статической характеристикой «вход-выход, содержащее датчик приращения выходной координаты процесса, подсоединенный через элемент с эталонной зоной нечувствительности к реле выбора знака команд управления, а также логические элементы «И, «ИЛИ, «НЕ, триггер реверса и исполнительный механизм управления объектом, отличающееся тем, что, с целью оптимизации параметров технологических процессов в объектах, статическая характеристика которых состоит из двух ветвей с разными по абсолютной величине наклонами, и точка перехода с одной ветви на другую соответствует оптимальному режиму, в устройстве установлен логический блок задания времени движения исполнительного механизма в сторону ветви статической характеристики объекта с малым наклоном, вход которого подключен к реле выбора знака команд управления, связанного с одним из единичных входов триггера реверса, второй единичный вход которого подключен к выходу логического блока задания времени движения исполнительного механизма в сторону ветви статической характеристики объекта с малым наклоном, а выходы триггера реверса связаны непосредственно и через логический элемент «И с исполнительным механизмом управления объектом.
2.Устройство по п. 1, отличающееся тем, что, с целью автоматического прекращения поиска оптимального режима при отсутствии
внешних возмущений, оно снабжено логическим блоком задания времени движения исполнительного механизма в оптимальную точку статической характеристики объекта, входы которого подсоединены к выходам триггера реверса, а выход через логические элементы «ИЛИ и «И связан с исполнительным механизмом.
3.Устройство по :пп. 1 И 2, отличающееся тем, что, с целью улучщения качества слежения за перемещением оптимальной точки характеристики объекта, в нем установлен датчик поверочного запуска устройства, входы которого параллельно подключены к триггеру реверса и выходу логического блока задания времени движения Исполнительного механизма в оптимальную точку статической характеристики объекта, а выход датчика поверочного запуска через логические элементы «НЕ и «ИЛИ подсоединен к логическому
элементу «И, связанному с исполнительиым механизмом управления объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2015 |
|
RU2600688C1 |
| Двухканальный шаговый оптимизатор | 1985 |
|
SU1343391A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ ПНЕВМАТИЧЕСКИЙ РЕГУЛЯТОР | 1965 |
|
SU174866A1 |
| Устройство для управления резонансным объектом | 1979 |
|
SU781780A1 |
| Многоточечная релейно-импульсная система для автоматического регулирования параметров технологического процесса | 1979 |
|
SU962840A1 |
| Экстремальный регулятор | 1978 |
|
SU744452A1 |
| Счетно-импульсное устройство для программного управления объектом с К-ступенчатым остановом | 1981 |
|
SU1007085A1 |
| Дискретный регулятор (его варианты) | 1980 |
|
SU960728A1 |
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
