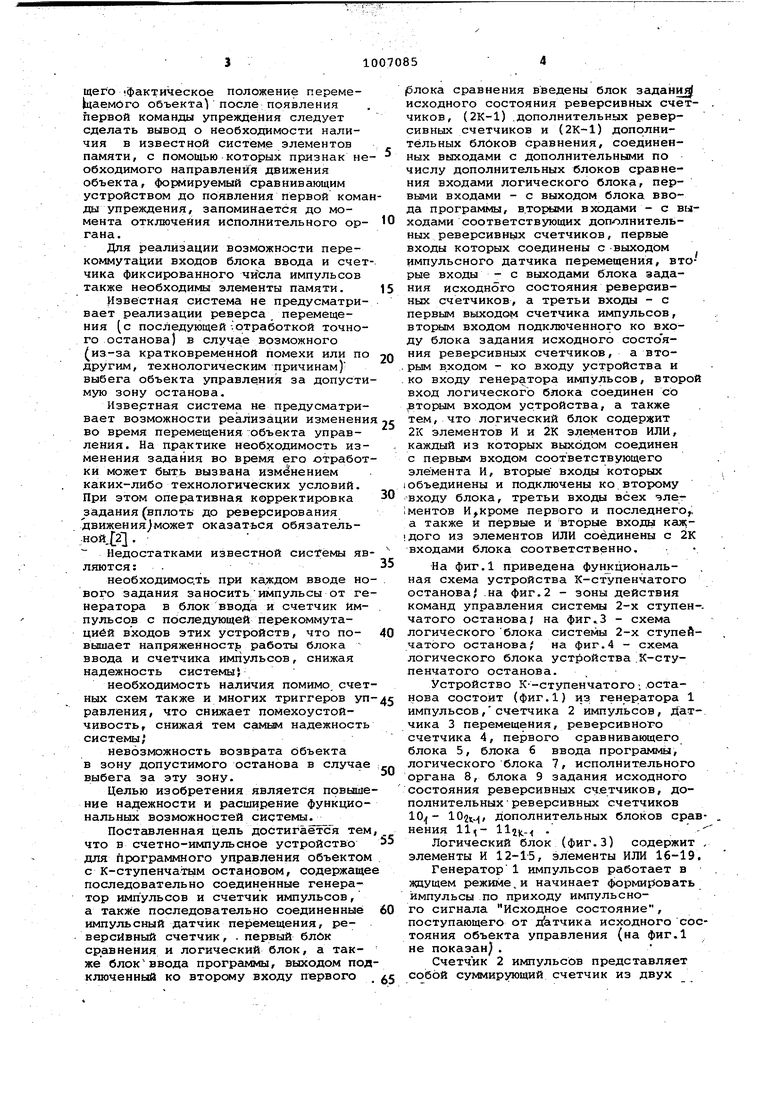
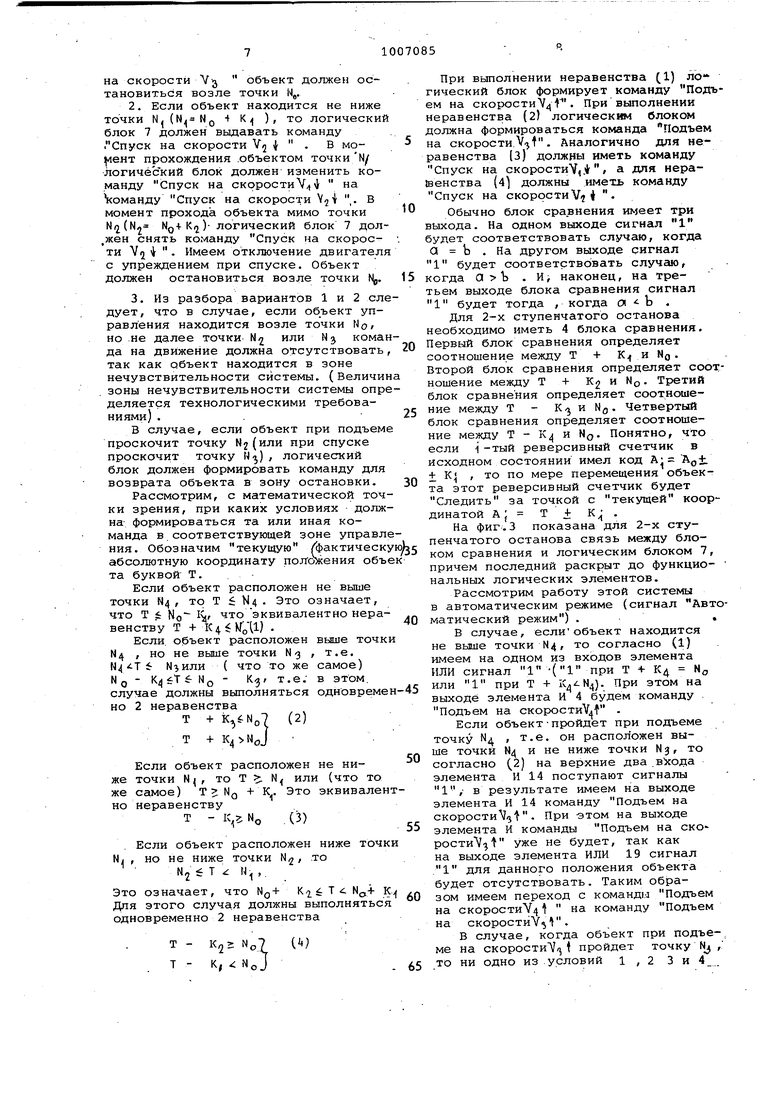
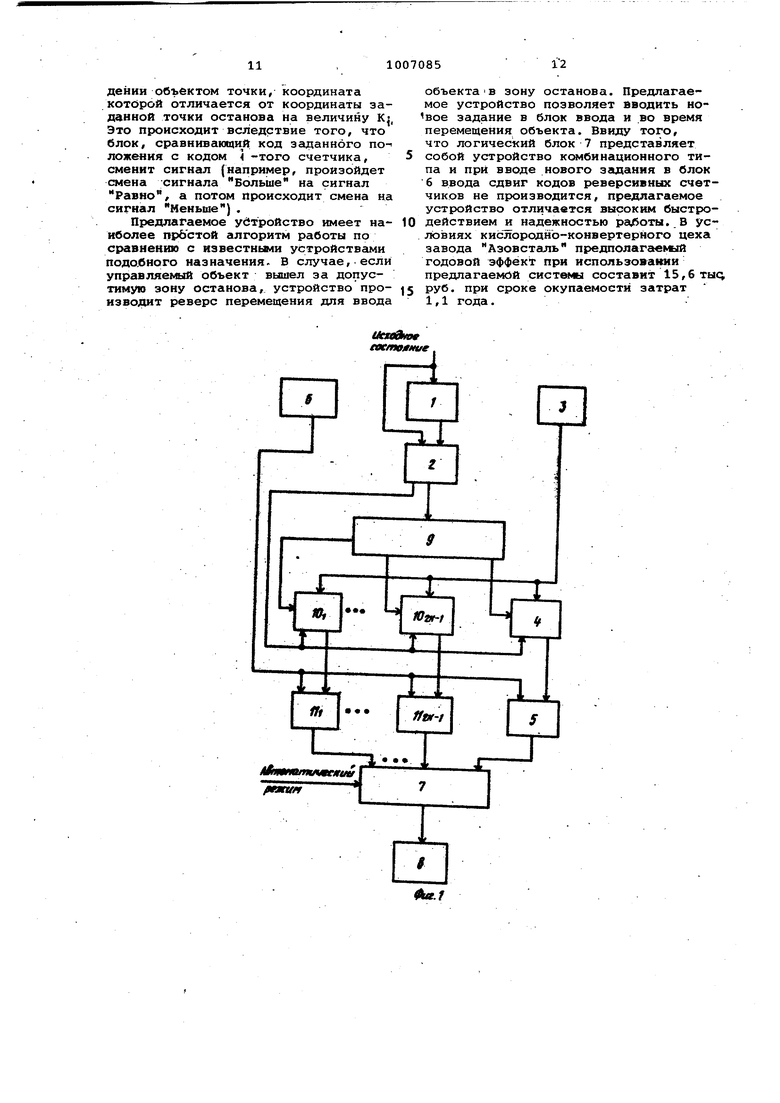
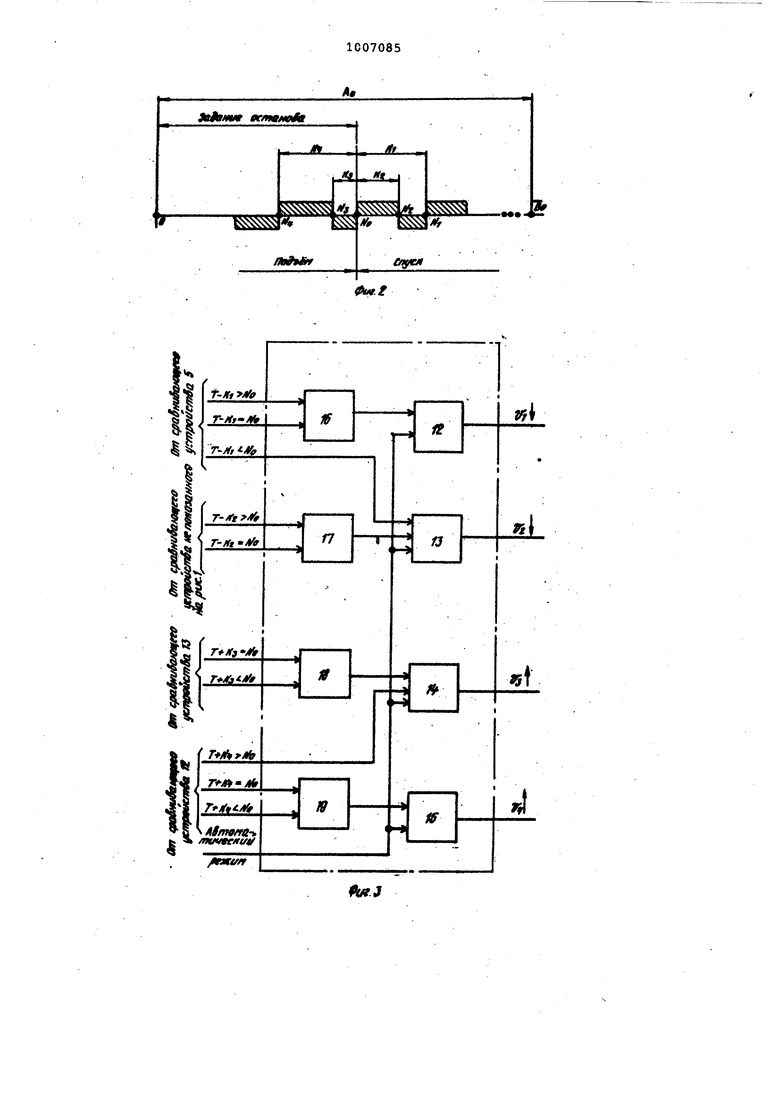
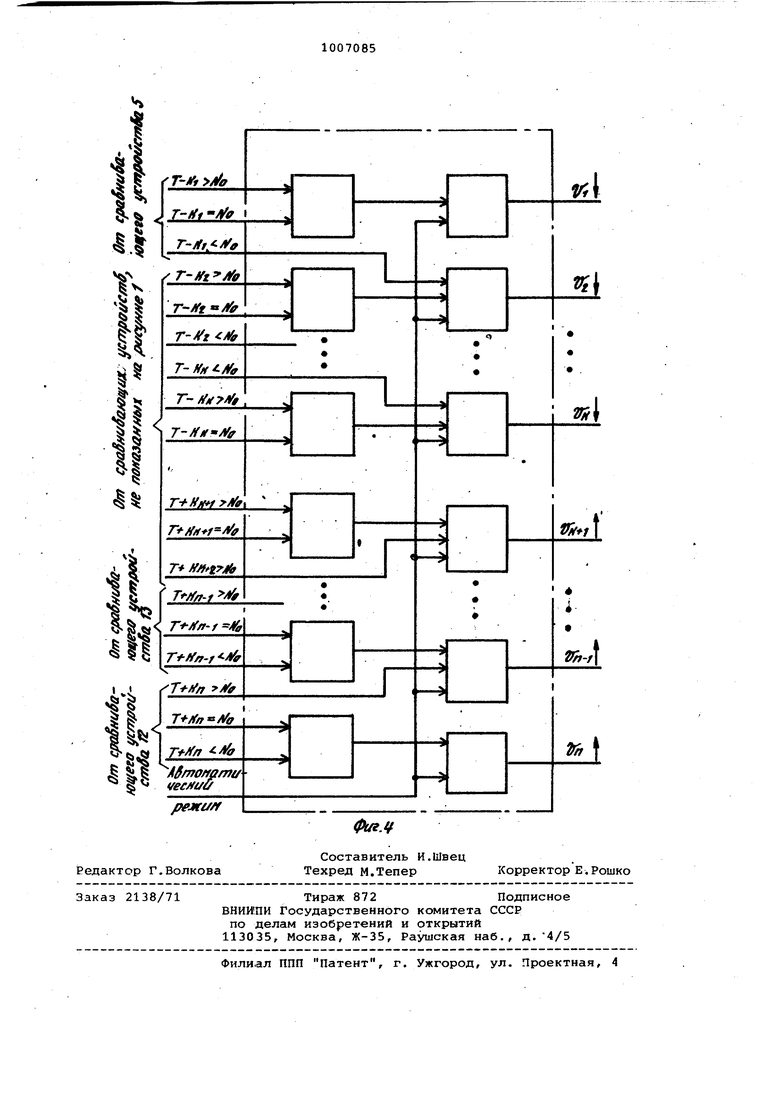
i Изобретение относится к области автоматизации производственных процессов и может найти применение в различных системах управления перем щением объекта, например в системах управления перемещением кислородной фурмы в конвертерах. Известно счетно-импульсное устро ство для программного управления, с держащее последовательно соединенны блок считывания текущих координат, блок формирования импульсов, блок определения направления движения и реверсивный счетчик, выход которого через дешифратор соединен с блоком цифровой индикаций и с входом логич кого блока, второй вход которого по ключен к выходу -блока задания прогр мы, а первый выход логического блок соединен с первым входом блока упра ления приводом подач, блок фо1 4иров ния упреждающих команд, первый вход которого соединен с- выходом реверсивного счетчика, второй вход - с вторым выхоДсм логического блока, третий вход - с выходом блока задания программы, а выход блока формирования упреждающих команд подключен ко второму входу блока управления приводети подач. В известном устройстве для выработки соответствующих команд на сни жение скорости привода предполагает ся наличие триггеров в блоке формиро вания упреждающих команд,который реа лизует формулу А- - в к;, где А - код задания; В - код реверсивного счетчика} К} - код величины интервала между заданной точкой останова и точкой перехода с одной скорости на другую ij . Недостатком известного устройства является сложность реализации про граммного перемещения объекта с помощью блока формирования упреждающих команд, необходимость триггеров управления, представляющих собой после довательные автоматы, которые являют ся менее помехоустойчивыми по сравне нию с устройствами комбинационнрго типа, что снижает надежность устройства в целом. Наиболее близким по технической сущности к предлагаемому является счетно-импульсная систе в программно го управления, содержащая генератор импульсов, счетчик импульсов, датчик перемещений, подключенный к реверсивному счетчику, а через него к сравнивающему устройству, второй вход которого соединен с блоком ввода программы, исполнительный орган и логический блок, подключенный к сравнивающему устройству, датчику перемещения, генератору импульсов, блоку ввода программы, сче.тчику им пульсов, а через него - к исполнительному органу, к которому подключено и сравнивающее устройство. В известной системе при каждом изменении задания производится подача импульсов упреждения, вырабатываемых генератором, в блок ввода и в счетчик импульсов. После этого включается исполнительный орган. В момент, когда сравняются коды реверсивного счетчика и блока ввода, подается первая команда упреждения (перевод с одной скорости перемещения на другую), при которой производится как перекоммутация входов счетчика импульсов (в результате которой к шине вычитания счетчика импульсов подключается выход датчика перемещения), так и перекоммутация входов блока ввода в результате которой а шины вычитания или суммирования блока -ввода подаются соответственно импульсы вычитания и суглмировання с датчика перемещения). С этого момента меняющийся код блока ввода совпадает с меняющимся кодом реверсивного счетчика, а иод счетчика импульсов уменьшается. На выходах счетчика импульсов поочередно появляются сигналы команд упреждения. Появление сигнала на выходе счетчика импульсов служит сигналом окончания отработки задания, при котором в блоке ввода содержимся код числа задания и поступление в него импульсов перемещения прекращается. В виду того, что исполнительный орган в подавляимцем больишнбтве случаев на практике для повышения надежности не содержит элементов памяти, а также, исходя из того, что для большинства случаев управления перемещением объекта с большой точностью требуется выдача команд упреждения с. большей дискретностью, чем дискретность импульсов перемещения (отрезок пути, на котором объект должен перемещаться с определенной скоростью, по своей величине превышает дискретность импульсов датчика перемещения), можно заключить, что для получения команд упреждения так называемый счетчик импульсов известной системы должен содержать не только реверсивный счетчик, но и несколько дешифраторов (число которых равно Необходимому числу команд упреждения а также несколько элементов памяти, с помощью которых импульсы с 5,ыходов соответствующих дешифраторов преобразуются в сигналы команд упреждения (имеющих вид не импульсного, а позиционного сигнала. Если исполнительный орган не содержит элементы памяти, то принимая во внимание ак1 непрерывного совпадения меняющихся кодов блока ввода и реверсивного счетчика j отслеживающего фактическое положение перемеЫаемйго объекта после появления первой команды упреждения следует сделать вывод о необходимости наличия в известной системе элементов памяти, с помощью которых признак не обходимого направленйя движения объекта, фоЕМируемый сравнивающим устройством до появления первой кома ды упреждения, запоминается до момента отключения исполнительного органа. Для реализации возможности перекоммутаЦии входов блока ввода и счет чика фиксированного чиЪла импульсов также необходимы элементы памяти. Известная система не предусматривает реализации реверса перемещения (с последующей-iотработкой точного останова) в случае возможного из-за кратковременной помехи или по другим, технологическим причинам) выбега объекта управления за допусти мую зону останова. Извертная система не предусматривает возможности реализации изменени во время перемещения объекта управления. На практике необ содимость из менения задания во время его отработ ки может быть вызвана изменением каких-либо технологических условий. При этом оперативная корректировка задания (вплоть до реверсирования движения)может оказаться обязатель.ной.2 . Недостатками известной системы яв ляются: . необходимость при каждом вводе но вого задания заноситьимпульсы от ге нератора в блок ввод и счетчик Импульсов с последующей перекоммутациёй входов этих устройств, что повышает напряженность работы блока ввода и счетчика импульсов, снижая надежность системы) необходимость наличия помимо сче ных схем также и многих триггеров yn равления, что снижает помехоустойчивость, снижая тем сги-плм надежност системы, невозможность возврата объекта в зону допустимого останова в случа выбега за эту зону. Целью изобретения является повыш ние надежности и расширение функцио нальных возможностей системы. Поставленная цель достигаётся те что в счетно-импульсное устройство для программного управления объекто с К-ступенчатЕдм остановом, содержащ последовательно соединенные генератор импульсов и счетчик импульсов, а также последовательно соединенные импульсный датчик перемещения, реверс вный счетчик, . первый блик сравнения и логический блок, а также блокввода програгдалы, выходом по ключенный ко второму входу первого (блока сравнения введены блок задани исходного состояния реверсивных счетчиков, (2К-1) .дополнительных реверсивных счетчиков и (2К-1) дополнительных бликов сравнения, соединенных выходами с дополнительньпии по числу дополнительных блоков сравнения входами логического блока г первыми входами - с выходом блока ввода программы, вторыми входами - с выходами соответствующих дополнительных реверсивнь1Х счетчиков, первые входы которых соединены с -выходом импульсного датчика перемещения, вторые входы - с выходами блока задания исходного состояния реверсивных счетчиков, а третьи входы - с первым выходом счетчика импульсов, вторым входом подключенного ко входу блока задания исходного состояния реверсивных счетчиков, а вторым входом - ко входу устройства и КО входу генератора импульсов, второй вход логического блока соединен со торым входом устройства, а также тем, что логический блок содержит 2К элементов И и 2К элементов ИЛИ, каждый из которых выходом соединен с первым входом соответствующего элемента И, вторые входы которых Объединены и подключены ко.второму входу блока, третьи входы всех элементов И Кроме первого и последнего,; а также и первые и вторые входы кал ДОГО из элементов ИЛИ соединены с 2К входами блока соответственно. На фиг.1 приведена функциональная схема устройства К-ступенчатого останова/ .на фиг.2 - зоны действия команд управления системы 2-х ступен-. чатого останова; на фиг.З - схема логического блока системы 2-х ступейчатого останова; на фиг.4 - схема логического блока устройства К-ступенчатого останова. Устройство К--ступенчатого . .останова состоит (фиг.1) из генератора 1 импульсов,счетчика 2 импульсов, датчика 3 перемещения, реверсивного счетчика 4, первого сравнивающего блока 5, блока 6 ввода прогрс1ммы, логического блока 7, исполнительного органа 8, блока 9 задания исходного состояния реверсивных сч.етчиков, дополнительныхреверсивных счетчиков 10 - 102t.|, дополнительных блоков сравнения HHH Логический блок (фиг.3) содержит , элементы И 12-15, элементы ИЛИ 16-19, Генератор1 импульсов работает в яодущем режиме и начинает формировать импульсы по приходу импульсного сигнала Исходное состояние, поступающего от датчика исходного состояния объекта управления (на фиг.1 не показан). Счетчик 2 импульсов представляет собой суммирующий счетчик из двух триггеров и используется в данном устройстве в- качестве распределител импульсов. Первым выходом счетчика является прямой выход 1-го триггера вторым выходом счетчика является пр мой выход 2-го триггера, 1-м импуль сов счетчик переводится из состояния О в состояние 1, 2-м импуль сом счетчик переводится из состояв состояние третьим импульсом счетчик переводится опять Входом счетчика им в состояние пульсов 2 служит элемент И, на перв вход которого поступает импульс Ис ходное состояние, а на второй вход поступают импульсы от генератора 1 импульсов. Длительность импульса И ходное состояние выбирается такой, чтобы счетчик 2 импульсов воспринимал не более трех импульсов. Такой занос импульсов в счетчик 2 еде лав для повьнпения помехоустойчивости устройства. В качестве импульсного датчика 3 перемещения может быть использован любой известный импульсный датчик со схемой форГ ирования импульсов на шинах (+ и (-) в зависимости от направления перемещения объекта (например, +) для подъема и (-) для спуска). В качестве реверсивных счетчиков 4,10{И 1{ могут быть использо- ваны любые известные одинаковые) реверсивные счетчики с установочными входами, функционирук)щие в том ж коде (например коде Айкена-) , что и блок 6 ввода программы, с выхода которого код задаваемой точки остановки объекта поступает на все срав нивающие устройства. На фиг.1 показаны для К- ступенчатого останова не все счетчики, а только первый дополнительный реверсивный счетчик 10, дополнительный счетчик Ю.й реверсивный счетчик 4. Остальные счет чики не показаны, но следует помни что всего имеем -К реверсивных счетчиков. Аналогично (хотя и имеем п 2 К сравнивающих устройств) на фиг.1 показаны только три сравнивающих устройства 11, 5 (остальные не показаны, чтобы не загромождать рисунка) Блок 9 предназначен для задания исходного состояния всех реверсивных счетчиков (когда управляемый объект находится в исходном состоянии ) и реализует формулу АО- К 1 7И) где Ар - число, ::оответствующее . координате исходного положения управляемого объекта, К - число, соответствующее расстоянию от заданной координаты остановадо точки, в которой производится перевод со скорости на скоростьУ;. j А - код исходного состояния i -го реверсивного счетчика. При этом под исходным положением if -го счетчика понимается положение , (код) , в которое i-й счетчик принудительно ориентируется во время нахождения объекта управления в своем исходном состоянии. Если соответствующая точка перевода со скорости М на скорость Ч. имеет координату большую, чем координата заданной точки остановки объекта (точка NQ на фиг.2), то А; АО - к. . Если точка перевода со скорости V| на скорость имеет координату меньшую, чем координата заданной точки остановки NQ, то Так задаются (заранее)исходные оостояния всех реверсивных счетчиков. Причина, по которой именно так определяются исходные .состояния реверсивных счетчиков, будет понятна при рассмотрении работы логического блока 7. Перед рассмотрением устройства и работы логического блока 7 для многоступенчатого (к-ступенчатого, , где К 2) останова разберем чай более простой - 2-х ступенчатый останов. В случае 2-х ступенчатого останова счетно-импульсное устройство должно выдавать следующие команды на перемещение управляемого объекта ; при заданной точке останова NO(фиг.2)г 1. Если объект управления находится не выше точки Н(М( (f К), то логический блок 7 должен выдавать команду на исполнительный орган 8 Подъем на скоростиЛГц f В момент прохождения объектом управления точка М. логический блок 7 должен изменить команду Подъем на скорости Vii на команду Подъем на скорости При нахождении объекта между точками N4 и Мэ (Nj NO - Kj) на выходе логического блока 7 команда Подъем на, скоростиУ должна присутствовать все время, пока объект не дойдет до точки N3. В момент прохода мимо точки Nj логический 6JjpK 7 должен снять команду Подъем на скорости УЗ Имеем так называемое ; отключение двигателя с упреждением. Величина упреждения при подъеме KJ) выбирается заранее на основании инерционности системы.. Если интервал упреждения при подъеме(Кj) выбран достаточно точно, то через некоторое время после снятия команды Подъем на скорости YIJ объект должен остановиться возле точки Ы,. 2.Если объект находится не ниже точки N,( -t К ), то логически блок 7 должен вьщавать команду Спуск на скорости Vj . В прохождения .объектом точки N логичёский блок должен изменить команду Спуск на скоростиV l на Команду Спуск на скорости Vji . в момент прохода объекта мимо точки Ni2(N2 N01-К)- логический блок 7 дол ,жен снять команду Спуск на скороети Vj i . Имеем отключение двигател с упреждением при спуске. Объект должен остановиться возле точки N. 3.Из разбора вариантов 1 и 2 сл дует, что в случае, если объект управления находится возле точки NO, но .не далее точки N или Nj кома да на движение должна отсутствовать так как объект находится в зоне нечувствительности системы. (Величи зоны нечувствительности системы опр деляется технологическими требованиями) . .В случае, если объект при подъем проскочит точку N2(или при спуске проскочит точку Н), логический блок должен формировать команду для возврата объекта в зону остановки. Рассмотрим, с математической точ ки зрения, при каких условиях долж на- формироваться та или иная команда в соответствующей зоне управл ния. Обозначим текущую фактическ абсолютную координату пояснения объ та буквой Т. Если объект расположен не выше точки N4, то Т N4. Это означает, что Т Iv что эквивалентно неравенству Т + K4 Kfoll) . Если, объект расположен выше точк N4 , но не выше точки N3 t т.е. 6 ( что то же самое) Ng - NQ - т.е; в этом, случае должны выполняться одновреме но 2 неравенства Т + k,tNo7 Т + Если объект расположен не ниже точки N , то Т 5- N или (что то же самое) Т Ng + К- Это эквивален но неравенству Т - . Если объект расположен ниже точк NJ , но не ниже точки N, .то Nj ё Т N , Это означает, что Ng+ К. NO+ К Дпя этого случа.я должны выполняться одновременно 2 неравенства Т - No7 С) Т - К, NO При выполнении неравенства (1) логический блок формирует команду Подъем на скорости 4 V При выполнении неравенства (2) логическим блоком должна формироваться команда Подъем на cKopocTH.V-jf. Аналогично для неравенства (З) должны иметь команду Спуск на скоростиУ,, а для неравенства (4 должны иметь команду Спуск на скороетиV i . Обычно блок сравнения имеет три выхода. На одном выходе сигнал 1 будет соответствовать случаю, когда Q b .На другом выходе сигнал 1 будет соответствбвать случаю, когда а Ъ . Hj наконец, на третьем выходе блока сравнения сигнал 1 будет тогда , когда ся b . Для 2-х ступенчатого останова необходимо иметь 4 блока сравнения. Первый блок сравнения определяет соотношение между Т + К и NQ. Второй блок сравнения определяет соотношение между Т + К2 и NQ. Третий блок сравнения определяет соотношение между Т - К и NQ. Четвертый блок сравнения определяет соотношение между Т - К4 и NQ. Понятно, что если i-тый реверсивный счетчик в Исходном состоянии имел код А Ад±. + K.J , то по мере перемещения объекта этот реверсивный счетчик будет Следить за точкой с текущей координатой AJ Т J: . На фиг.3 показана для 2-х ступенчатого останова связь между блоком сравнения и логическим блоком 7, причем последний раскрыт до функцио- нальных логических элементов. Рассмотрим работу этой системы в автоматическим режиме (сигнал Автоматический режим) . В случае, еслиобъект находится не выше точки N4 г то согласно (1) имеем на одном из входов элемента ИЛИ сигнал 1 ( при Т + Кд N, или 1 при Т + . При этом на выходе элемента И 4 будем команду Подъем на скоростиУ . Если объект-пройдет при подъеме точку N , т.е. он расположен выше точки N и не ниже точки Njr то согласно (2) на верхние два вУода элемента И 14 поступают сигналы 1,- в результате имеем на выходе элемента И 14 команду Подъем на скорости. V. При этом на выходе элемента И команды Подъем на скоPOCTHV V уже не будет, так как на выходе элемента ИЛИ 19 сигнал 1 для данного положения объекта будет отсутствовать. Таким образом имеем переход с команд1.-л Подъем на CKOpocTHY4 на команду Подъем на CKOpocTHV V. В случае, когда объект при подъе-, ме на cкopocтиV 1 пройдет точку Nj , то ни одно из условий 1 , 2 3 и 4 не будет выполняться, т.е. исчезнут условия для формирования любой кома ды,, произошло отключение двигателя с упреждением ПРИ подъеме, объект начинает двигаться за счет инерции системы и останавливается возле за данной точки NO. Если объект находится не ниже то ки NI, то ввиду выполнения условия на выходе элемента И12 будет команда Спуск на cкopocтиV I . Когда объект будет находиться ни же точки N,Ho не ниже точки Nj, то в соответствии с (4) на выходе элемента И 13 имеем команду Спуск на скороеTHVjVf а сигнал на выходе элемента И12 исчезнет. В случае, если объект при спуске на скоростиУ. пройдет точку N , то на выходе логического блока не б дет присутствовать команда на перемещение, т.е. имеем отключение двигателя с упреждением при спуске с роследующей остановкой Объекта возле заданной точки. На фиг.4 показана схема логического блока 7, аналогичная схеме на фиг.3, но уже не для 2-х ступенчато го, а для К-ступенчатого останова. Как на фиг.З, так и на фиг.4 усилители, реле и сами реле, контактами которых соответствующие команды подаются в схему исполнительного органа 8, для упрощения не показаны. Устройство К-ступенчатого- останова работает следующим образом (фиг.4). По сигналу Исходное состояниеJ поступающему от датчика исходного положения объекта (на фиг.1 не показан) включается генератор 1 импул сов, в результате чего счетчик 2 , импульсов переводится из состояния О в состояние 1 и с первого выхода счетчика 2 импульсов на уста навливающие в О входы всех реверсивнЕлх счетчиков поступает сигнал (все реверсивные счетчики устанавли ваются в положение О). После этог за счет поступления в счетчик 2 импульсов 2-го импульса, этот счетчик переводится в положение 2. В результате этого сигнал на первом выхо де счетчика 2 импульсов исчезает, а на втором выходе счетчика 2 импуль сов появляется сигнал 1, поступающий на вход блока 9. Вследствие этого с выходов блока-9 коды. (Aj) исходных состояний реверсивных счёт Чиков 4,10(- Ю поступают на входы этих реверсивных счетчиков. Теперь, в зависимости от координаты задаваемой тгчки останова численное значение которой в виде кода поступает с выхода блока 6 ввода про граммы на вторые входы всех блоков 5, 111-112V..,сравнения, IV - JK-i кодов Л исходных состояний реверсив ных счетчиков, и при. условии подачтт в логический блок 7 сигнала Автоматический режим на вход два, логический блок .7 выдает в схему исполнительного органа 8 команду. В результате прихода на исполнительный орган 8 команды, определяющей H Iправление и номинал скорости, объект управления двигается. С датчика 3 перемещения на входы реверсивных счетчиков 4, 10 - 10j,поступают импульсы на одноименныевходы, т.е. либо по шине + , либо по шине - . В результате, хотя соотношения между кодами самих реверсивных счетчиков 4,104 - 10jj,остаются неизменными (определяются суммой .или разницей между Ki и К комбинация сигналов, поступающих с вЬгходов блоков 5, 11/|- llj)- сравнения на входы логического блока 7, меняется. Это приводит к формированию другой команды, определяющей иную Скорость перемещения объекта. Для К-ступенчатого останова используются несколько реверсивных счетчик,ов (число которых И 21с), каждый из которых, отслеживает абсолютную координату своей точки, перемещающейся синхрорно с объектом управления, но отстоящей от объекта управления всегда на определенном и постоянном расстоянии, задаваемом заранее. Другими словами, код j -того счетчика отличен от кода координаты объекта управления на постоянное числок К, , численно равное интервалу между задаваемой точкой остановки объекта и соответствующей точкой изменения команды (перевод на другую скорость). В устройстве используется .несколько блоков сравнения (число которых совпадает с числом реверсивных счетчиков). Каждый из блоков сравнения анализирует соотношение между кодом заданной точки остановки объек-, та и соответствующим: (для данного блока сравнения) кодом реверсивного счетчика. Сигналы Больще, Меньше, или Равно .поступают с выходов данных блоков Б- логический блок. Логи.ческий блок представляет собой схему комбинационного типа (не содержит .элементов памяти . В зависимости от того, какая комбинация сигналов поступает .в- 1анный момент на входы логического блока, в последнем формируется команда для движения объекта в ту или другую сторону с определенной (заранее выбранной) скоростью. Эта команда присутствует на выходе логического блока все время, пока соответствующая комбинация сигналов на входах логического блока не изменится. Изменение комбинации сигналов, поступающих в логический блок с выходов блоков сравнения, может происходить только при прохож11
пении Объектом точки, координата котйрой отличается от координаты заданной точки останова на величину Kj. Это происходит вследствие того, что блок, сравнивающий код заданного положения с кодом 4 -того счетчика, сменит сигнал (например, произойдет смена сигнала Больше на сигнал Равно, а потом происходит смена на сигнал Меньше).
Предлагаемое уйтройство имеет наиболее прбстой алгоритм работы по сравнению с известными устройствами подабного назначения. В случае,если управляемый объект вышел за допустамую зону останова, устройство производит реверс перемещения для ввода
i2
1007085
объекта-в зону останова. Предлагаемое устройство позволяет вводить задание в блок ввода и во время перемещения объекта. Ввиду того, что логический блок 7 представляет 5 собой устройство комбинационного типа и при вводе нового задания в блок 6 ввода сдвиг кодов реверсивных счетчиков не производится, предлагаемое устройство отличается высоким быстродействием и надежностью ра/5оты.. В ус10ловиях кислородно-конвертерного цеха завода Азовсталь предполагаемый
годовой эффект при , .. предлагаемой составит 15,Ь ты руб. при сроке окупаемости затрат
15
1,1 года.
АЕ Я0МЙМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления объектом с К-ступенчатым остановом | 1982 |
|
SU1083160A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1130833A1 |
| Устройство для программного управления объектом с @ -ступенчатым остановом | 1984 |
|
SU1196813A1 |
| Устройство для программного управления объектом с К - ступенчатым остановом | 1985 |
|
SU1287108A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1986 |
|
SU1348774A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| Устройство для программного управления объектом с К-ступенчатым остановом | 1983 |
|
SU1123021A1 |
| Счетно-импульсная система программного управления | 1973 |
|
SU452808A1 |
| Цифровое устройство для управления позиционным приводом | 1970 |
|
SU911459A1 |
| Устройство для считывания графической информации | 1974 |
|
SU670943A1 |
ifs
Щ A Щ.Г
fft
Дую
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Счетно-импульсное устройство для программного управления | 1975 |
|
SU611181A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Счетно-импульсная система программного управления | 1973 |
|
SU452808A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
