Изобретение относится к автоматическому регулированию технологических процессов, в частности к системам многоточечного релейно-импульсного регулирования параметров (температуры, влажности, расхода жидкости и др.) технологического процесса, и может быть использовано для регулирования температуры дистиллята на выходе холодильников перегонных аппаратов и когобаторов эфиромасличного сырья.
Известна система для регулирования температуры дистиллята на выходе холодильников перегонных аппаратов и когобаторов, содержащая датчики температуры, многоточечный уравновешенный, мост, блок реле, блоки программных реле и регулирующие клапаны с исполнительными механизмами 1 ,
Недостатком системы является низкая точность работы.
Наиболее близкой является многоточечная релейно-импульсная система для автоматического регулирования параметров технологического процесса, содержащая п исполнительных механизмов, п датчиков регулируемого параметра, соединенных через первый
коммутатор с входом блока уставки задания, релейный усилитель, выходы которого связаны соответственно с входами второго и третьего коммутаторов , управляющие входы коммутаторов соединены с первым выходом блока
.уставки задания, второй выход которого подключен к входу релейного усилителя, выходы второго и третьего
10
I коммутаторов соединены с входами двух релейных устройств, выходы которых связаны с соответствующими входами п исполнительных механизмов, два реле времени, входы и выходы
15 которых соединены с входами и выходами соответствующих релейных устройств 2J ,
Недостатком известйой системы является низкая точность регулиро20вания, вызванная большим запаздыванием из-за низкой скорости коммутатора, обусловленная тем, что система не обеспечивает подключение к очередному (1+1)-му объекту опроса,
25 пока не закончится опрос и подача управляющего импульса на исполнительный механизм предыдущего 1-го объекта.
Кроме того, система в каждом цикле
30 обегания подает на объект регулирования управляющие импульсы, сумма которых по величине превосходит величину, необходимую для компенсации рассогласования, что вызывает колебательный переходный процесс в системе регулирования и увеличивает динамическую погрешность.
Цель изобретения - noBbEuei|fie точности регулирования системы.
По.ставленная цель обеспечивается тем, что в известную систему, содержащую два гЗелейных устройства, выходами соединенных с исполнительными механизмами, п датчиков регулируемого параметра, .выходы которых через последовательно соединенные первый коммутатор, блок уставки, и релейный усилитель соединены с входами второго и третьего коммутатаров, введены задатчик частоты и в каждый канал управления формирователь управляющего импульса, первый вход которого соединен с выходом соответствующего коммутатора, второй вход - с соответствующим выходом задатчика частоты, третий вход с вторым выходом формирователя другого канала, первый выход - с входом соответствующего релейного устройства, второй выход - с третьи входом формирователя первого канала.
Формирователь управляющего импулса содержит делитель частоты, два триггера и последовательно соединенные элементы И, элемент ИЛИ и элемент задержки, выходом подключенный к первому входу первого триггера и делителя частоты, второй вход которого соединен с первым выходом формирователя, а также с первым входом триггера, вторьм входом подключенный к третьему входу формирователя и через первый триггер с первым входом элемента И, второй вход которого соединен с выходом второго триггера, третий вход делителя частоты подключен к втором входу формирователя, причем второй выход формирователя соединен с первым входом формирователя.
При таком решении обеспечивается подача на объект первого управляющего импульса, полярность которого зависит от знака сигнала рассогласования, а остальные управляющие имп::(льсы подаются с кратностью времени цикла обегания. Быстрый контроль объектов, запоминание сигнала ошибки при каждом цикле обегания и подача на объект регулирования управляющего импульса с интервалом времени, соответствующим кратности цикла обегания, исключает пульсирующий режим работы исполнительного механизма и соответственно колебательный переходный процесс в систем регулирования. Это позволяет значительно повысить точность регулирования системы и расширить ее функциональные возможности.
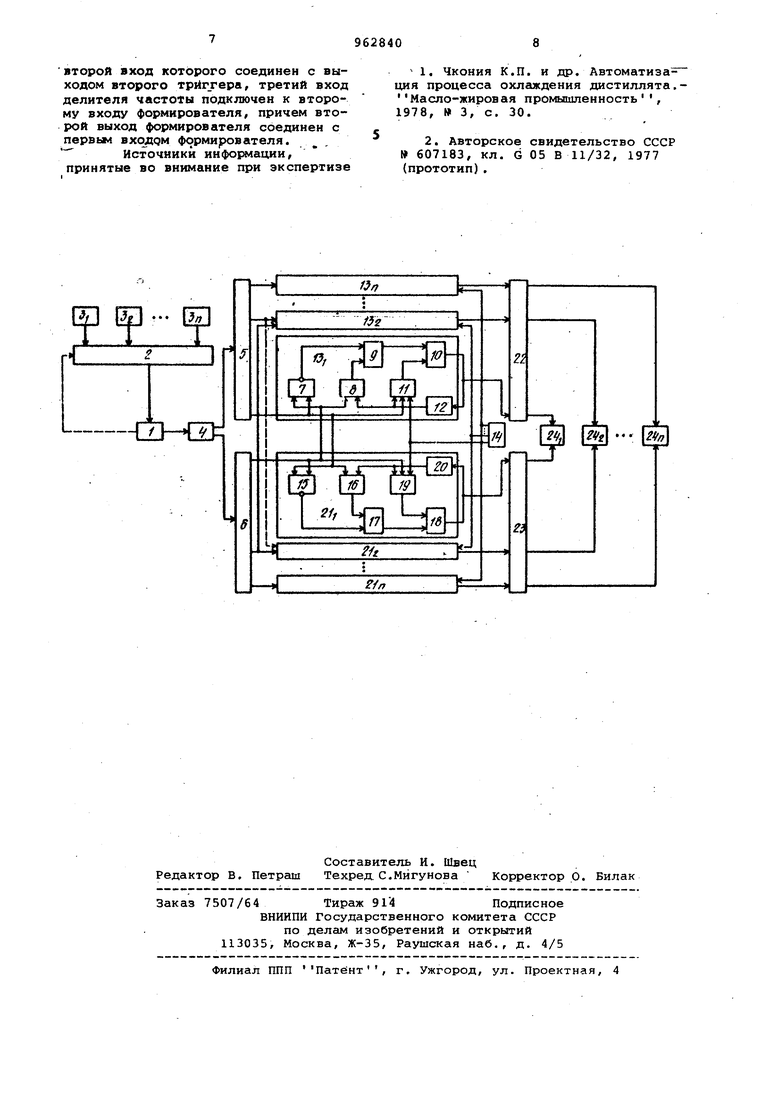
На чертеже представлена блок-схема релейно-импульсной системы для автоматического регулирования параметров технологического процесса.
Система содержит блок 1 уставки, коммутатор 2, п датчиков 3 регулируемого параметра, релейный усилитель 4, коммутаторы 5 и б, RS-триггер 7, триггер 8, элемент И 9, элемент ИЛИ 10, делитель 11 частоты, элемент 12 задержки, формирователи 13-t.n управляющего импульса, задатчик 14 частот, триггеры 15 и 16, элемент И 17, элемент ИЛИ 18, делитель 19 частоты, элемент 20 задержки, формирователи , управляющего импульса, релейные устройства 22 и 23, п исполнительных механизмов 24. I
Система работает следующим образом.
Блок 1 уставки задания (обеспечивает раздельную уставку для каждого объекта разных значений заданий), управляя коммутатором 2, сравнивает поочередно сигналы датчиков 3 с установленным в нем заданным значением. Когда ошибка находится в пределах между уставками (в пределах зоны нечувствительности) на выходах релейного усилителя 4 и коммутаторов 5(6), сигналы отсутствуют и соответственно на выходе формирователя 13(21) длительности управляющего импульса. В исходном состоянии на делителе 11(19) частоты предварительно с помощью блока программного задатчика14 устанавливается численное значение F частоты импульсов, которому соответствует время кратностью цикла обегания, а на выходах RS-триггера 8(16) и RS-триггера 7(15) с инверсным выходом имеется соответственно логическая единица и логический нуль.. Когда ошибка пре-: вышает зону нечувствительности релейного усилителя, на одном из входов последнего в зависимости от знака суиибки появляется логический
сигнал Ч, который с помощью коммутаторов 5(6), управляемых 6.rtOKOM уставки задания синхронно с коммутатором 2, подается на вход делителя 11(19) частот и на вход Установка нуля на RS-триггер 7(15) с инверсным выходом, на выходе которого появляется логическая единица. Им. пульсы с элемента И 9(17) через элементы ИЛИ 10(18) поступают одновременно на входы релейного устройства 22(23) и элемент 12(20) задержки. Из релейного устройства 22(23) сигнал поступает на вход со5 ответствующего исполнительного механизма 24, осуществляющего изменение регулируемого параметра.
Независимо от времени коммутации коммутатора продлевается воздействие регулирующего импульса на исполнительный механизм 24 с помощью элемента 12(20) задержки. По истечении установленного времени задержки t элемент 12(20) задержки приводит в нулевое состояние RS-триггер 8(16) (на его выходе появляется логический нуль) и делитель 11(19) частоты, при этом отключается сигнал, поступающий на исполнительный механизм из релейного устройства 22(23).
Длительность воздействия управляющего импульса на исполнительный еханизм определяется по формуле
и
7ТТ (с).
К„5-100%
где L - время полного оборота выходного вала исполнительног механизма, с;
Kpg- коэффициент усиления объекта, размерностьпара1метра
% Х.Р.О.
и - величина управляющего импульса при однократном воздействии на объект, размерность параметра.
Величина управляющего импульса U зависит от интервала времени между поочередными воздействиями на один из объектов регулирования, параметров статической и динамической характеристики объекта, зоны нечувствительности релейного усилителя и требуемого показателя качества регулирования .
При поступлении следующего импульса через коммутатор 5(6) на выходе блока изменения частот и длительности управляющего импульса на выходе последнего сигнал не появляется до тех пор, пока число импульсов, поступающих на делитель 11(19) частот, не станет равным числу, соответствующему частоте, установленной на делителе 11(19) частот Таким образом происходит подача на исполнительный механизм 24 управляющего импульса с кратностью времени цикла обегания. Однако появляющийся сигнал на выходе коммутатора 6(5) подается на входы Установка единицы RS-триггера 8(16) и RSтриггера 7(15) с инверсным выходом и приводит их в исходное состояние. Аналогично работают остальные каналы системы регулирования.
Использование новых элементов И, ИЛИ, RS-триггера, RS-триггера с инверсным выходом, делителя частоты блока временной задержки, блока программного задатчика частот для каждого канала регулирования, обеспечивающих запоминание и -подачу управляющего воздействия с интервалом времени, кратным циклу обегания объекта, позволяет повысить точность регулирования и качество переходных процессов.
Предлагаемая многоточечная релейно-импульсная система дпя регулирования параметров технологического процесса обеспечивает устойчивость
0. процесса регулирования объектов, обладающих разной ;инерционностью и отношением времени запаздывания к постоянной времени, за-счет формирования различных интервалов врес мени включения исполнительных устройств в цикле регулирования, а также различные интервалы времени самих регулирующих циклов, что существенно повышает точность регули.. рования и расширяет область применения устройства.
Формула изобретения
25
Многоточечная релейно-импульсная система для автоматического регулирования параметров технологического процесса, содержащая два релейных
0 устройства, выходами соединенных с исполнительными механизмами, п датчиков регулируемого параметра, выходы которых через последовательно соединенные первый коммутатор, блок
5 уставки и релейный усилитель соединены с входами второго и третьего коммутаторов, отличающаяся тем, что, с целью повышения точности регулирования, системы, в нее введены задатчик частоты и в каждый канал управления формирователь управляющего импульса, первый вход которого соединен с выходом соответствующего коммутатора, второй вход 5 с соответствующим выходом задатчика частоты, третий вход - с вторым выходом формирователя другого канала, первый выход - с входом соответствующего релейного устройства, второй
выход - с третьим входом Фоомирователя первого канала.
2. Система по п. 1, отличающаяся тем, что формирователь управляющего импульса содержит делитель частоты, два триггера и последовательно соединенные элементы И, элемент ИЛИ и элемент задержки, выходом подключ-енный к первому входу первого триггера и делителя частоты,
второй вход которого соединен с первым выходом формирователя, а также с первым входом второго триггера, вторым входом подключенный к третьему входу формирователя и через первый триггер с входом элемента И,
второй вход которого соединен с выходом второго триггера, третий вход делителя частоты подключен к второму входу формирователя, причем второй выход формирователя соединен с первым входдм формирователя. Источники информации, принятые во внимание при экспертизе
1. Чкония К.П. и др. Автоматизация процесса охлгикдения дистиллята. Масло-жировая промышленность , 1978, 3, с. 30.
2. Авторское свидетельство СССР 607183, кл. G 05 В 11/32, 1977 (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Многоточечная релейно-импульсная система для регулирования параметров технологического процесса | 1980 |
|
SU968782A2 |
| Устройство для регулирования массовых расходов смешиваемых продуктов | 1988 |
|
SU1695273A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
| Устройство для автоматического управления процессом отгонки эфирных масел на непрерывно действующих перегонных аппаратах | 1980 |
|
SU960766A1 |
| СИСТЕМА МНОГОТОЧЕЧНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1971 |
|
SU316084A1 |
| Задатчик ритма | 1986 |
|
SU1339485A1 |
| Устройство для программного управления | 1987 |
|
SU1474595A1 |
| Многоканальный регулятор | 1983 |
|
SU1092472A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| Термостатирующее устройство | 1980 |
|
SU943666A1 |
2i
3 И 1$
23
