Изобретение предназначено для настройки систем автоматического регулирования и управления.
При эксплуатации систем автоматического регулирования и в частности следящих систем требуется их качественная настройка, что, как правило, осуществляется оператором. Однако в целом ряде случаев (например, при массовом производстве систем, когда требуется высококачественная настройка) целесообразней производить автоматическую настройку параметров системы.
Предлагаемое устройство, кроме усилителей, исполнительных двигателей и схем сравнения, содержит два- квадратора, соединенных с выходом своей схемы сравнения, сумматор, входы которого связаны с выходами обоих квадраторов, два блока реле, а также подключенные к выходу системы блок для измерения и запоминания амплитуды, выход первого из которых через соответствующую схему сравнения и один из блоков реле соединен с исполнительным двигателем настройки коэффициента усиления, а выход другого через свою схему сравнения и второй блок реле связан с двигателем настройки коэффициента передачи обратной связи по скорости, кроме этого выходы сумматора подсоединены ко входам обоих усилителей.
Такое соединение блоков в устройстве дает возможность применять его для настройки коэффициента усиления и коэффициента передачи обратной связи по скорости линейных систем высокого порядка vi нелинейных систем.
Амплитудно-частотная характеристика замкнутой системы определяется ее параметрами. Как в линейной системе любого порядка,
так к в нелинейной всегда имеется резонансная частота w. вполне определенная амплитуда вынужденных колебаний на этой частоте при определенном входном воздействии. Резонансную частоту и амплитуду вынужденных
колебаний на этой частоте можно определить экспериментальным или аналитическим путем. Для следящих систем эти величины довольно просто определяются экспериментальным путем. Резонансная частота в основном
определяется коэффициентом усиления, а амплитуда вынужденных колебаний - коэффициентом демпфирования. Следовательно, настройку коэффициента усиления можно вести в функции отклонения резонансной частоты
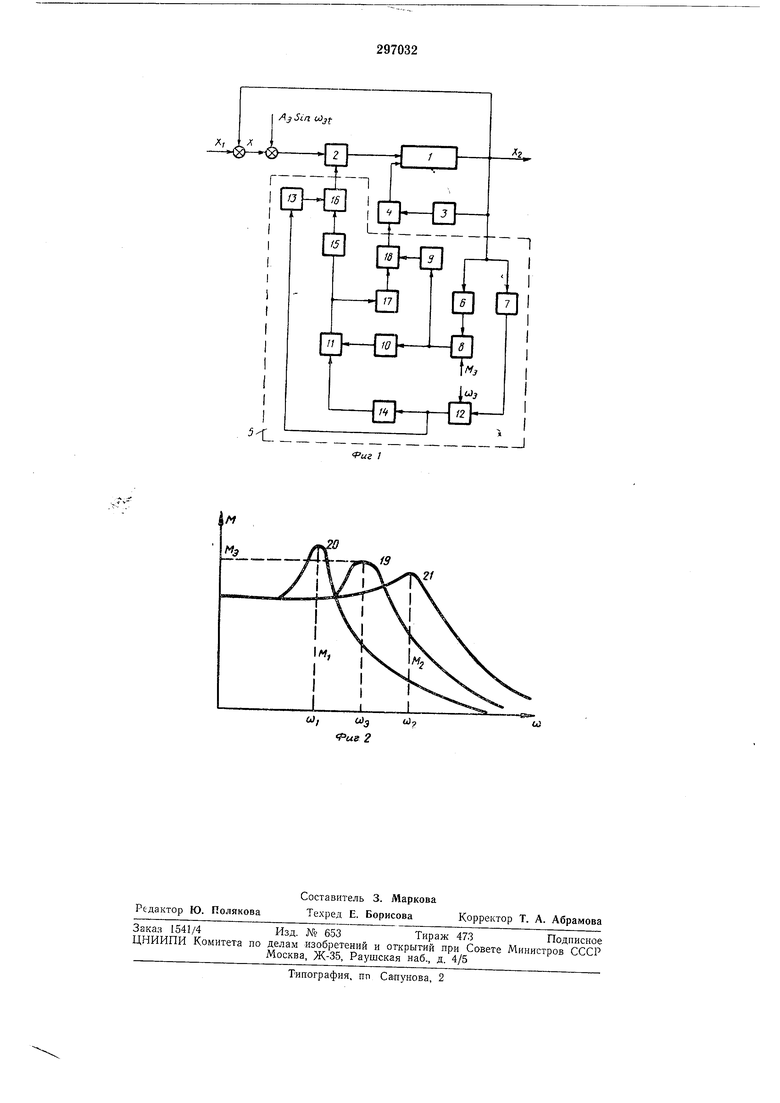
системы от эталонной, а настройку коэффициента передачи обратной связи по скорости- в функции отклонения амплитуды вынужденных колебаний от эталонного значения амплитуды вынужденных колебаний на резонансровать резонансную частоту и амгкпнтуду выиуждеииых колебаний ка этой частоте. Для построения устройства автоматической настройки используется критерий оценки качества:(M3-)-fK-mp)f, где Мэ - эталонное значение амплитуды вынужденных колебаний на резонансной частоте; М -текущее значение амплитуды вынужденных колебаний; соэ - эталонная резонансная частота; ыр - текущая резонансная частота. В случае минимизации этого критерия но , .TH.v гпя.прпт. ялгппитлл «ЯПТППЙТ.И блгтрт- 15 методу градиента алгоритм настройки будет: для коэффициента усиления , - Ж(/) + с., - Шр(01}К-(0 для коэффициента демпфирования ,M(()Y + К-ЫОГ)(. Для упрощения реализации схем указанный алгоритм можио изменить без потери качества настройки: для коэффициента усиления /Су гг: - J , - Ж(0 + - Шр( Sign с«з - р()К/, ДЛЯ коэффициента демпфирования д - т. - щ) - p()i Sign u;, - . Для настройки необходимо на вход или внутренний контур подавать пробное гармо- з5 ническое воздействие с эталонной резонансной частотой и определенной амплитудой. В случае, когда сор ыэ, коэффициент усиления /Су будет увеличиваться, а когда сор шэ-уменьщаться, причем скорость изменения его в обо- 40 их случаях будет пропорциональна величине Ms - M(t)Y+ соэ -сор(0. Коэффициент передачи обратной связи но скорости /Сд будет увеличиваться, когда М. М, и уменьщаться, когда М , Мд.45 На фиг. 1 представлена блок-схема следящей системы и устройства автоматической настройки ее параметров, где Xi - входная величина; Х - выходная величина; X - ощибка системы; /1э51пшэ - пробное гармоничес- 50 кое воздействие; Мэ - эталонное значение амплитуды вынужденных колебаний на резонансной частоте соэ при пробном воздействии СОэ t. На фиг. 2 приведены амплитудно-частотные55 характеристики замкнутой системы, где М- амплитуда колебаний, к - частота колебаний. Следящая система представлена в виде основного контура регулирования 1, настраиваемого коэффициента 2 усиления (/Сд), диф-60 ференциатора 5 цепи обратной связи, настраиваемого коэффициента 4 передачи обратной 5 10 20 25 30 амплитуды и блока 7 измерения частоты, вход которых соедипеи с выходол системы. Выход блока 6 измерения и заиомипания амплитуды соединен со схемой 8 сравнения, на которую подается эталонное значение амплитуды вынужденных колебаний Мд на резонансной частоте соэ. а выход ее соединен с блоком 9 реле и через квадратор W - с сумматором У/. Выход блока 7 измерения частоты, так же, как и блок 6 измерения и запоминания амплитуды, соединен со схемой J2 сравнения, на которую подается эталонное значение частоты соэ, а выход схемы 12 сравнения соединен с блоком реле .5 и через квадратор сумматором п. Выход сумматора // через усилитель У5 соединен с исполнительным двигателем настройки коэффициента усиления и через усилитель 17 с исполнительным двигателем 18 настройки коэффициента передачи обратной связи по скорости. Исполнительный двигатель 16 соединен также с блоком 13 реле, а исполнительный двигатель 18 - с блоком 9 реле. Выходной вал двигателя 16 соединен с настраиваемым коэффициентом /Су (им может быть в частности нотенцнометр), а выходной вал двигателя 18 - с настраиваемым коэффициентом /Сд (им может быть в частности потенциометр). На фиг. 2 представлены амплитудно-частотпые характеристики, настроенной системы 19 и ненастроенной 20, 21. Настройка коэффициентов усиления /Су и передачи обратной связи по скорости /Сд происходит следующим образом. На вход или во внутренний контур системы подаются пробные гармонические колебания asincoa с эталонной частотой (равной резонансной частоте системы) соэ и определенной амплитудой A-J. Б настроенной системе на выходе будут колебания с такой же резонансной частотой соэ и определенной амплитудой Мэ (отличной от амплитуды пробного воздействия) - кривая 19 на фиг. 2. В ненастроенной системе амплитуда и резонансная частота будут отличкривые 20, 21 ными от эталонных 0:13 и фиг. 2. Пусть, например, настраиваемая система имеет резонансную частоту ojpi и амплитуду MI. Выходной сигнал системы поступает на блок 6 измерения и запоминания амплитуды и блок 7 измерения частоты, на выходе которых соответственно выделяются амплитуда и lacTOTa вынужденных колебаний. С выхода блока 6 измерения и запоминания сигнал, пропорциональный амплитуде колебаний, подается на схему 8 сравнения, на которую также подается сигнал, пропорциональный эталонному значению амплитуды Мэ, в результате чего на выходе схемы 8 сравнения формируется сигнал, нропорциональный алгебраической разности эталонного и текущего значения амплитуды УИд -М,. В данном случае эта
матор 11. Блок 9 реле срабатывает и включает двигатель 18 (подключает входной сигнал или подает напряжение на обмотку возбуждения), при зтом направление вращения двигателя 18 определяется знаком разности Ма - MI. В данном случае Мз - Ali О и коэффициент передачи обратной связи по скорости /Сд изменяется в сторону увеличения. С выхода блока 7 измерения частоты сигнал, пропорциональный резонансной частоте вынуледенных колебаний сорь подается на схему 12 сравнения, на которую также подается сигнал, пропорциональный эталонному значению частоты соэ, в результате чего на выходе схемы 12 сравнения формируется сигнал, пропорциональный алгебраической разности эталонного и текущего значений резонансных частот шэ - copi.
С выхода схемы 12 сравнения сигнал ноступает на блок 13 реле и через квадратор 14 - на сумматор 11. Блок 13 реле срабатывает и включает двигатель 16 (подключает входной сигнал или подает напряжение на обмотку возбуждения), при этом направление вращения двигателя 16 определяется знаком разности (йэ-сор. В данном случае соэ-Mpi 0 и /(у изменяется в сторону увеличения. Скорости исполнительных двигателей 16, 18 определяются величиной выходного сигнала сумматора 11, пропорционального величине (Мэ - M)2 + (шэ - copi)2, который подается на двигатель 16 через усилитель 15 и на двигатель 18 через усилитель 17. Усилители 15, 17 служат для усиления выходного сигнала сумматора 11 по мощности.
Когда величина Мэ - MI О, что определяется чувствительностью схемы, блок 9 реле
отключит двигатель 18, несмотря на то, что управляющий сигнал с сумматора 11 может быть не равен нулю, так как в этот момент «о - copi может быть не равным нулю. Процесс настройки коэффициента передачи обратной связи по скорости /Сд закончен. Когда величина шэ - сор О, что определяется чувствительностью схемы, блок 13 реле отключит двигатель 16, несмотря на то, что управляющий сигнал с сумматора 11 может быть равен нулю, так как в этот момент Мэ - MI может быть не равным нулю. Процесс настройки коэффициента усиления K. закончен.
15
Предмет изобретения
Устройство для автоматической настройки систем регулирования, содержащее два усилителя, подключенных к исполнительным двигателям, и схемы сравнения, отличающееся тем, что, с целью расщирения функциональных возможностей, оно дополнительно содержит два квадратора, соединенных с выходом своей схемы сравнения, сумматор, входы которого связаны с выходами обоих квадратов, два блока реле, а также подключенные к выходу системы блок для измерения частоты и блок для измерения и запоминания амплитуды, выход первого из которых через соответствующую схему сравнения и один из блоков реле соединен с исполнительным двигателем настройки коэффициента усиления, выход другого через свою схему сравнения и второй блок реле связан с двигателем настройки коэффициента передачи обратной связи по скорости, а выходы сумматора подсоединены ко входам обоих усилителей.
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1978 |
|
SU697974A1 |
| Реле давления | 1972 |
|
SU459812A1 |
| Система управления | 1981 |
|
SU996995A1 |
| УСТРОЙСТВО для НАСТРОЙКИ КОЭФФИЦИЕНТА УСИЛЕНИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1972 |
|
SU328428A1 |
| Устройство для автоматической настройки резонансного усилителя | 1973 |
|
SU540357A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Адаптивная система управления фрезерным станком | 1982 |
|
SU1041990A1 |
| Устройство для автоматической настройки компенсации емкостных токов в электрических сетях | 1984 |
|
SU1257745A1 |
| Генератор синусоидальных колебаний | 1980 |
|
SU935978A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОЙ НАСТРОЙКИ СЛЕДЯЩИХ СИСТЕМ | 1972 |
|
SU354400A1 |
oi,
о).
0)3 fug 2
