Изобретение относится к области автоматики и контрольно-измерительной техники и может быть использовано в аппаратуре контроля для определения степени работоспособности линейных динамических систем и для обнаружения в них неисправностей.
При контроле линейных динамических систем обычно известны вид передаточной функции системы, номинальные значения ее параметров и допуски для отклонений каждого из параметров передаточной функции. Под определением степени работоспособности контролируемой системы и обнаружением неисправностей понимается определение в течение определенного промежутка времени и с минимумом экономических затрат величины отклонений для каждого из изменяющихся параметров и выявление тех параметров, у которых отклонения лежат вне допуска. Известен способ контроля, в котором на входы системы последовательно подают стимулирующие гармонические сигналы, частоты которых выбирают исходя из нечувствительности частотной характеристики системы (вещественной или мнимой) к отклонениям соответствующего параметра, и замеряют реакцию только на выходе системы. После того, как поданы все контрольные сигналы (число их равно числу контролируемых параметров )причину неисправности приписывают тому параметру.
реакция на контрольный сигнал которого лежит в допустимых пределах, а реакции на остальные контрольные сигналы выщли за допуски.
При одновременном выходе за поле допусков нескольких параметров известный способ не дает возможности их различить, для этого потребуются дополнительные проверки, что удлиняет время контроля. При данном способе обнарул ения неисправностей ничего нельзя сказать о количественной величине отклонений параметров от номинальных значений. Кроме того, контроль занимает сравнительно больщой отрезок времени, так как в любом
случае неисправность обнаруживается только после подачи всех контрольных сигналов и измерения реакции на выходе производятся каждый раз после окончания переходных процессов в системе, так как используется частотная характеристика.
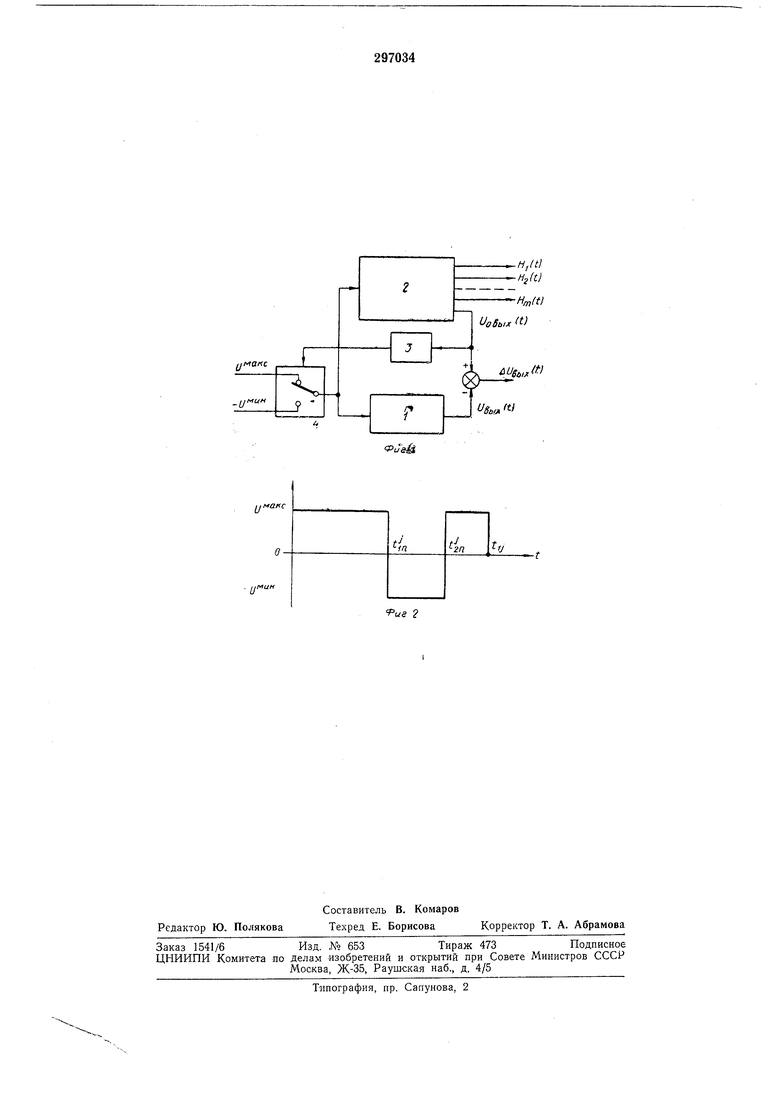
Предлагаемый способ контроля отклонений параметров линейных динамических систем базируется на использовании чувствительности выходного сигнала контролируемой системы к отклонениям параметров, при этом используется чувствительность временной реакции на выходе системы, а не чувствительность частотной характеристики. переключением входного сигнала от максимального до минимального уровней при достижении сигналом на выходе модели контролируемой системы расчетных значений и фиксируют величину разности сигналов на выходе контролируемой системы и ее модели и значение функции чувствительности контролируемого параметра в момент равенства нулю выходных сигналов модели чувствительности по всем параметрам, кроме контролируемого. При этом становится возможным определять численные значения отклонений параметров по величине отклонений выходного сигнала в заданный момент времени и по ним судить о степени работоспособности контролируемой системы, о наличии неисправных элементов и прогнозировать будущие неисправности, всегда однозначно указать все параметры, которые имеют в момент контроля недопустимые отклонения, путем сравнения полученных величин с соответствующими значениями допусков, уменьшить время контроля и вести контроль только по одному выходному сигналу системы На фиг. 1 приведена блок-схема, поясняющая предлагаемый способ контроля, где } - контролируемая система, 2 - вспомогательная модель, ее выходными сигналами являются текущие значения функций чувствительности по каждому параметру контролируемой системы HI (/), Я2 (t),....Hm (t) и сигнал модели контролируемой системы i/o вых (О при номинальных значениях ее параметров; 3 - устройство (блок), которое фиксирует моменты достижения сигналом опорных значений и выдает сигнал на переключение ключа 4 с одного уровня входного сигнала на другой. На фиг. 2 показан вид стимулирующего сигнала, где - fy - максимальный и минимальный постоянные уровни сигнала { , izn. - моменты переключения сигнала для контроля /-ГО параметра, 1ц-момент контроля отклонений /-ГО параметра. Предлагаемый способ контроля отклонений параметров линейных динамических систем состоит из двух этапов подготовительного (I) и собственно контроля (П). Подготовительный этап производится для заданного типа контролируемой системы один раз. Результаты этого этапа используются многократно при контроле серии однотипных объектов и при повторном контроле одной и той же системы. На I этапе, зная общий вид передаточной функции контролируемой системы и номинальные значения ее параметров, строят электрическую модель контролируемой системы (при номинальных значениях параметров) и модели чувствительности выходной реакции контролируемой системы к изменениям интересующих параметров. Эти .модели можно объединить в одну вспомогательную 2, выходными сигналами которой будут номинальная выходная реакция контролируемой системы i/OBbix(0 и текущие значения функций увствительности H(t), Н {t),....Hm (f)- Посе составления модели определяют необходиое число п и моменты переключения стимуирующих сигналов, при которых каждый из их в момент tij (см. фиг. 2) в наибольшей тепени выделит в выходном сигнале контроируемой линейной динамической системы сотавляющую, обусловленную отклонением олько одного параметра. Для этого расчет ведут из условия, чтобы к заданному моменту времени контроля стимулирующий сигнал максимизировал функцию чувствительности по одному параметру, а функции чувствительности do всем остальным параметрам обращал в нуль. Получаемые временные моменты не являются крагными между собой, а число их зависит от числа контролируемых параметров, что делает устройство формирования входных сигналов довольно слолшым. Поэтому предлагается переключать входной стимулирующий сигнал с максимального постоянного уровня на минимальный и обратно не по достижении определенного момента времени, а по достижении реакции Ug вых (О на каждый скачок входного сигнала определенной опорной величины. Опорные величины выходного сигнала t/OBbix(0 есть не что иное, как значения этого сигнала в моменты переключения. Поэтому после определения моментов переключения стимулирующих сигналов рассчитываются опорные значения выходного сигнала модели контролируемой системы. В устройстве 3 опорные величины могут быть выставлены с помощью эталонных напряжений. Далее рассчитывают максимизируемые величины функций чувствительности HJJ (tij) /.макс j oTOpbie необходимы для получения отклонений параметров. На этом предварительный этап заканчивается. П этап - собственно контроль - состоит в следующем. Вход вспомогательной модели соединяют с входом контролируемой системы. Выходной сигнал вспомогательной модели, совпадающий с f/OBbix(0. и выходной сигнал контролируемой системы подают на вычитающее устройство для получения разности (0- В блоке 3 выставляют начальные условия для фиксирования моментов достижения сигналом t/OBbix(0 опорных величин, чтобы в момент tij получить отклонение для значений первого контролируемого параметра. Затем в момент г О к входу контролируемой системы и вспомогательной модели подключают постоянный уровень (/макс ( фиг. 2). Когда реакция на выходе модели контролируемой системы Uo вых (О достигнет первой опорной величины, сигналом с блока 3 переключают ключ 4 на второй уровень- (умиц При достижении t/OBbix(0 второго опорного значепия снова сигналом с блока 3 происходит переключение ключа 4. И так до тех пор, пока сигнал f/o вых (О не достигнет последней опорной величины. При этом произойдет последнее переключение стимулирующего сигнала.
Так как на выходе вспомогательной модели 2 имеются текущие значения всех функций чувствительности, то требуемое время контроля /1,- фиксируют в тот момент, когда величины функций чувствительности по всем параметрам, кроме контролируемого, достигнут с заданной точностью нуля.
В этот момент определяют величину разности А t/Bbixj ()- После этого она делится на величину //// (рассчитанную на I этапе) и получают отклонение одного контролируемого параметра.
(iij)
А, //мр
Таким образом получают величину отклонения одного параметра. Для определения величины другого параметра в блоке 3 выставляют новые начальные условия для формирования следующего стимулирующего сигнала и ставят ключ 4 в положение для подачи максимального уровня сигнала. Процесс повторяется и через время ttj получают величину отклонения для следующего параметра. Через
гп
время 2 г где (ц - время, требуемое
на получение величины отклонения параметра будут проконтролированы отклонения всех параметров.
В случае если в системе требуется контролировать отклонение двух параметров, процесс контроля можно упростить, так как обычно оба стимулирующих сигнала должны иметь одно переключение. При этом блок 3 можно исключить. В момент t О на вход контролируемой системы и ее вспомогательной модели подают одни из уровней входного
сигнала. Затем в некоторый момент времени производят переключение сигнала на другой уровень. Этот момент фиксирован, его определяют предварительно, исходя из требуемой
точности и требуемого времени контроля. Измерение отклонения А(7вых (t) производят в те моменты времени, когда либо одна, либо другая функции чувствительности проходят через нуль. Деля полученные величины отклонений выходного сигнала контролируемой системы от номинального АС/вых, (l), At/B.,ix2 (2)
на соответствующие величины функций чувствительности, которые рассчитываются предварительно, получают отклонения каждого из
контролируемых параметров.
И в этом случае для заданного типа контролируемой системы расчет вспомогательной модели, момента переключения и величины функций чувствительности в момент контроля
производят лищь один раз на подготовительном этапе.
Предмет изобретения
Способ контроля линейных динамических
систем путем подачи стимулирующих сигналов на контролируемую систему, ее модель и модель функций чувствительности по каждому из параметров контролируемой системы, отличающийся тем, что, с целью повыщения
помехоустойчивости и упрощения процесса контроля, формируют стимулирующий сигнал переключением входного сигнала от максимального до минимального уровней по достижении сигналом на выходе модели контролируемой системы расчетных значений и фиксируют величину разности сигналов на выходе контролируемой системы и ее модели и значение функции чувствительности контролируемого параметра в момент равенства нулю
выходных сигналов модели чувствительности по всем параметрам, кроме контролируемого.
H,/tl НгМ
НтШ