Изобретение относится к области контроля и диагностирования систем автоматического управления и их элементов.
Известен способ диагностирования динамических звеньев систем управления (Патент РФ №2110828, МКИ6 G05B 23/02, 1998), основанный на интегрировании выходного сигнала блока с весом e-αt, где α - вещественная константа.
Недостатком этого способа является то, что он применим только для контроля параметров апериодического звена первого порядка.
Наиболее близким техническим решением (прототипом) является устройство для контроля параметров звеньев систем управления (Патент РФ №2173873, МКИ6 G05B 23/02, 2001).
Недостатком этого способа и устройства является то, что они применимы только для диагностирования апериодического первого порядка, апериодического второго порядка и колебательного звеньев.
Технической задачей, на решение которой направлено данное изобретение, является улучшение помехоустойчивости способа поиска параметрических дефектов в непрерывных системах автоматического управления путем улучшения различимости дефектов и расширение функциональных возможностей способа для нахождения неисправностей в виде отклонений параметров передаточных функций блоков произвольной структуры в динамической системе с произвольным соединением блоков.
Поставленная задача достигается тем, что предварительно регистрируют реакцию заведомо исправной системы fjном(tl), j=1, …, k; l=1, …, n на интервале tl∈[0, Тк] в k контрольных точках при n дискретных моментах времени на входное воздействие x(t), определяют выходные сигналы модели для каждой из k контрольных точек, полученные в результате пробных отклонений m параметров всех блоков, для чего поочередно в каждый параметр передаточной функции всех блоков динамической системы вводят пробное отклонение и находят выходные сигналы системы для того же входного воздействия x(t), полученные в результате выходные сигналы для каждой из k контрольных точек и каждого из m пробных отклонений в n дискретные моменты времени Pji(tl), j=1,…, k; i=1,…, m; l=1,…, n регистрируют, определяют отклонения сигналов модели, полученных в результате пробных отклонений соответствующих параметров всех структурных блоков от реакции заведомо исправной системы
ΔРji(tl)=Pjt(tl)-Fjном(tl), j=1,…, k; i=1,…, m; l=1,…, n, замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал x(t), определяют сигналы контролируемой системы для k контрольных точек в n дискретные моменты времени Fj(tl), j=1,…, k; l=1,…, n, определяют отклонения сигналов контролируемой системы для k контрольных точек в n дискретные моменты времени от номинальных значений
ΔFj(tl)=Fj(tl)-Fjном(tl), j=1,…, k; l=1,…, n,
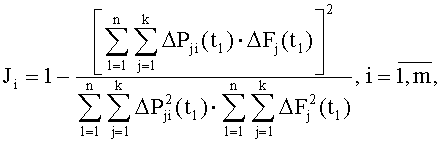
определяют диагностические признаки для каждого из m параметров из соотношения 
по минимуму значения диагностического признака определяют неисправный параметр.
Выражение (1) можно представить в виде:

где

Диагностические признаки (2) лежат в фиксированном интервале значений [0,1], поэтому различимость двух параметрических дефектов может оцениваться как разность значений соответствующих признаков.
Графическая интерпретация диагностического признака заключается в следующем: поскольку в квадратных скобках выражения (2) записано скалярное произведение двух векторов единичной длины размерностью k*n (k - число контрольных точек, n - число дискретних значений времени), то выражение в квадратных скобках есть косинус угла между этими векторами, следовательно выражение (2) можно заменить выражением:

где φi - угол между вектором единичной длины отклонений сигналов ОД от номинальных и вектором единичной длины отклонений от номинальных сигналов модели с пробным изменением i-го параметра.
Фактическая различимость i-го параметрического дефекта определяется по формуле:
 ,
,
где Ji - значение признака i-го присутствующего в объекте параметрического дефекта, Jk - значение ближайшего к нему по величине признака.
Введем также понятие структурной различимости i-го параметрического дефекта как разность:
 ,
,
где Ji - значение признака i-го присутствующего в объекте параметрического дефекта, Jb - значение ближайшего к нему по величине признака параметрического дефекта, расположенного в другом динамическом элементе ОД.
Покажем, что данный способ позволяет находить дефекты не только с глубиной до структурного блока, но еще и с глубиной до параметра соответствующего блока.
Сущность предлагаемого способа заключается в следующем. Способ основан на использовании пробных отклонений параметров модели непрерывной динамической системы.
Пробное отклонение параметра, минимизирующее значение диагностического признака (1) или (2), указывает на наличие дефекта в этом параметре. Область возможных значений диагностического признака лежит в интервале [0,1].
Таким образом, предлагаемый способ поиска неисправностей сводится к выполнению следующих операций.
1. В качестве динамической системы рассматривают систему, состоящую из произвольно соединенных динамических элементов, передаточные функции которых в сумме содержат m параметров.
2. Предварительно определяют время контроля TK≥ТПП, где Тпп - время переходного процесса системы. Время переходного процесса оценивают для номинальных значений параметров динамической системы.
3. Фиксируют число контрольных точек k.
4. Предварительно определяют векторы ΔPi(tl) отклонений сигналов модели в l-е дискретные моменты времени, полученные в результате пробных отклонений i-го параметра каждого из m параметров всех блоков для номинальных значений параметров передаточных функций блоков, для чего выполняют пункты 5-8.
5. Подают тестовый сигнал x(t) (единичный ступенчатый, линейно возрастающий, прямоугольный импульсный и т.д.) на вход системы управления с номинальными характеристиками. Принципиальных ограничений на вид входного тестового воздействия предлагаемый способ не предусматривает.
6. Регистрируют реакцию системы с номинальными характеристиками Fjном(tl), j=1, …, k; l=1, …, n на интервале tl∈[0,TK] в k контрольных точках для n дискретных моментов времени.
7. Определяют сигналы модели для каждой из k контрольных точек, полученные в результате пробных отклонений каждого из m параметров блоков для n дискретных моментов времени, для чего поочередно для каждого параметра блока динамической системы вводят пробное отклонение этого параметра передаточной функции и выполняют пункты 5 и 6 для одного и того же тестового сигнала x(t). Полученные в результате выходные сигналы для каждой из k контрольных точек и каждого из m пробных отклонений при n моментах времени Рji(tl), j=1,…, k; i=1,…, m; l=1, …, n регистрируют.
8. Определяют отклонения сигналов модели, полученных в результате пробных отклонений параметров соответствующих блоков
ΔРji(tl)=Pjt(tl)-Fjном(tl), j=1,.…, k; i=1,.…, m; l=1, …, n.
9. Замещают систему с номинальными характеристиками контролируемой. На вход системы подают аналогичный тестовый сигнал x(t).
10. Определяют сигналы контролируемой системы для k контрольных точек и n моментов времени Fj(tl), j=1, …, k; l=1, …, n, осуществляя операции, описанные в пунктах 5 и 6 применительно к контролируемой системе.
11. Определяют отклонения сигналов контролируемой системы для k контрольных точек и n моментов времени от номинальных значений
ΔFj(tl)=Fj(tl)-Fjном(tl), j=1,.…, k; l=1,.…, n.
12. Вычисляют диагностические признаки наличия неисправного параметра по формуле (1).
13. По минимуму значения диагностического признака определяют дефектный параметр.
Поскольку диагностические признаки (1) и (2) имеют область возможных значений, ограниченную интервалом [0,1], то разность между ближайшим к минимальному признаку и минимальным признаком (который указывает на дефектный параметр) количественно характеризует различимость данного дефекта с учетом расположения параметра блока на структурной схеме, вида и параметров передаточных функций блоков и всех условий диагностирования, при которых получены эти значения диагностических признаков (вид тестового сигнала, количество и расположение контрольных точек, количество и величина дискретных моментов времени контроля). Наилучшая различимость - когда указанная разность равна единице (в терминах векторной интерпретации нормированные векторы отклонений сигналов, соответствующих этим параметрам для пробных отклонений ортогональны). Наихудшая различимость - когда указанная разность равна нулю (в терминах векторной интерпретации нормированные векторы отклонений сигналов, соответствующих этим параметрам для пробных отклонений коллинеарные). Поэтому применение нормированных диагностических признаков позволяет сравнивать результаты диагностирования для выбора оптимальных режимов поиска дефектов.
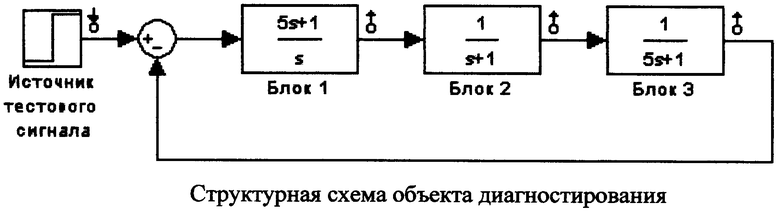
Рассмотрим реализацию предлагаемого способа поиска одиночного параметрического дефекта для системы, структурная схема которой представлена на рисунке.
Передаточные функции блоков:
номинальные значения параметров: T1=5 с (J1); k1=1 (J2); К2=1 (J3); Т2=1 с (J4); К3=1 (J5); Т3=5 с (J6). При поиске одиночного параметрического дефекта в виде отклонения постоянной времени T1=4 с (дефект №1) в первом звене путем подачи ступенчатого тестового входного сигнала единичной амплитуды (Тr=10 с) получены значения диагностических признаков по формуле (1) при использовании трех контрольных точек, расположенных на выходах блоков. Дефект, найденный путем использования пробных отклонений величиной 10%, дает следующие значения диагностических признаков: J1=0.05717; J2=0.705; J3=0.5803; J4=0.8367; J5=0.3906; J6=0.5171. Анализ значений диагностических признаков показывает, что заявляемый способ обладает довольно хорошей различимостью параметрических дефектов, расположенных как в разных, так и в одном блоке.
Моделирование процессов поиска параметрических дефектов во втором и третьем блоках данного объекта диагностирования при тех же условиях диагностирования дает следующие значения диагностических признаков.
При наличии дефекта в блоке №2 (в виде уменьшения параметра Т2 на 20%, дефект №4) заявляемый способ дает следующие результаты: J1=0.8379; J2=0.2854; J3=0.5009; J4=0.01201; J5=0.467l; J6=0.4578.
При наличии дефекта в блоке №3 (в виде уменьшения параметра Т3 на 20%, дефект №6) заявляемый способ дает: J1=0.5175; J2=0.2672; J3=0.5984; J4=0.2612; J5=0.3087; J6=0.04483.
Минимальное значение диагностического признака во всех случаях правильно указывает на дефектный параметр.
Анализ значений диагностических признаков показывает, что различимость параметрических дефектов заявляемого способа высокая, что благоприятно сказывается на помехоустойчивости диагностирования.
Следует отметить, что заявляемый способ работоспособен и при больших значениях величин пробных отклонений параметров (10-40%). Ограничением на величину пробного отклонения является необходимость сохранения устойчивости модели с пробным отклонением.
Анализ значений диагностических признаков также показывает, что различимость параметрических дефектов, расположенных в разных блоках, значительно лучше различимости параметрических дефектов, расположенных в одном блоке.
Областью применения является область контроля и диагностирования систем автоматического управления и их элементов. Технический результат - улучшение помехоустойчивости способа поиска параметрических дефектов в непрерывных системах автоматического управления путем улучшения различимости дефектов и расширение функциональных возможностей способа для нахождения неисправностей в виде отклонений параметров передаточных функций блоков произвольной структуры в динамической системе с произвольным соединением блоков. Результат достигается тем, что предварительно регистрируют реакцию заведомо исправной системы на интервале в контрольных точках при дискретных моментах времени на входное воздействие; определяют выходные сигналы модели для каждой из контрольных точек, полученные в результате пробных отклонений параметров всех блоков, для чего поочередно в каждый параметр передаточной функции всех блоков динамической системы вводят пробное отклонение и находят выходные сигналы системы для того же входного воздействия, полученные в результате выходные сигналы для каждой из контрольных точек и каждого из пробных отклонений в дискретные моменты времени регистрируют, определяют отклонения сигналов модели, полученных в результате пробных отклонений соответствующих параметров всех структурных блоков от реакции заведомо исправной системы, замещают систему с номинальными характеристиками контролируемой, на вход системы подают аналогичный тестовый сигнал, определяют сигналы контролируемой системы для контрольных точек в дискретные моменты времени, определяют отклонения сигналов контролируемой системы для контрольных точек в дискретные моменты времени от номинальных значений, определяют диагностические признаки для каждого из параметров из соотношения, по минимуму значения диагностического признака определяют неисправный параметр. 1 ил.
Способ поиска неисправностей динамического блока в непрерывной системе, основанный на том, что фиксируют число m параметров передаточных функций блоков, входящих в состав системы, определяют время контроля TK≥ТПП, фиксируют число k контрольных точек системы, регистрируют реакцию системы и модели, определяют диагностический признак, по минимуму диагностического признака определяют неисправный параметр, отличающийся тем, что регистрируют реакцию заведомо исправной системы Fj ном(t1), j=1, …, k; l=1, …, n, на интервале t1∈[0, Тк] в k контрольных точках и n дискретных моментов времени, определяют сигналы модели для каждой из k контрольных точек, полученные в результате пробных отклонений каждого из m параметров и n дискретных моментов времени, для чего поочередно для каждого параметра всех динамических блоков системы вводят его пробное отклонение и находят выходные сигналы системы для тестового входного сигнала x(t), полученные выходные сигналы для каждой из k контрольных точек и каждого из m пробных отклонений и n дискретных значений времени Pji(t1), j=1, …, k; i=1, …, m; l=1, …, n, регистрируют, определяют отклонения сигналов модели, полученных в результате пробных отклонений соответствующих параметров, от номинальных ΔPji(t1)=Pji(t1)-Fjном(t1), j=1, …, k; i=1, …, m; l=1, …, n, замещают систему с номинальными характеристиками контролируемой, на вход контролируемой системы подают аналогичный тестовый сигнал x(t), определяют сигналы контролируемой системы для k контрольных точек и n дискретных значений времени Fj(t1), j=1, …, k; l=1, …, n, определяют отклонения сигналов контролируемой системы для k контрольных точек и n дискретных значений времени от номинальных значений ΔFj(t1)=Fj(t1)-Fjном(t1), j=1, …, k; l=1, …, n, определяют диагностические признаки из соотношения
по минимуму диагностического признака определяют неисправный параметр.
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЗВЕНЬЕВ СИСТЕМ УПРАВЛЕНИЯ | 1999 |
|
RU2173873C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОГО БЛОКА В СОСТАВЕ СИСТЕМЫ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2136033C1 |
| СПОСОБ ПОИСКА НЕИСПРАВНОСТЕЙ В ДИНАМИЧЕСКИХ СИСТЕМАХ | 1998 |
|
RU2143720C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ НЕИСПРАВНОСТЕЙ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2084945C1 |
| СПОСОБ ПОИСКА НЕИСПРАВНОГО БЛОКА В ДИНАМИЧЕСКОЙ СИСТЕМЕ | 2001 |
|
RU2199776C2 |
| Способ диагностирования неисправностей динамических объектов | 1987 |
|
SU1462254A1 |
| Способ диагностики отказов динамических объектов и устройство для его осуществления | 1990 |
|
SU1718190A1 |
| Самозаряжающийся сифон | 1947 |
|
SU73093A1 |
| СПОСОБ ОСНОВАННОЙ НА МОДЕЛИ ДИАГНОСТИКИ МЕХАТРОННОЙ СИСТЕМЫ | 2006 |
|
RU2394276C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ЭЛЕКТРОННЫХ СХЕМ | 1997 |
|
RU2137148C1 |
| US 4500951, 19.02.1985 | |||
| US 4608628, 26.08.1986 | |||
| US 4851985 А, 25.07.1989. | |||

