Изобретение относится к области вибрационного траиснортирования и может быть использовано, например, для привода вибрационных коивенеров.
Известны инерцномпыс вибраторы с выдвижным дебалаисом, включающие вращаю1ЦПЙСЯ 1зал, связанный с дебалансными грузами.
Вибромашины с инерционными приводами требуют некоторого сремеии для пуска и выбега, которое зависит от величины пускового момента, затрачиваемого на разгон вращаюн;ихся масс и на преодоление сил сопротивлеиия в колебательной системе, сил инерции и восстанавливающих сил. Поэтому для запуска и ввода машины в рабочий режим необходимы достаточный занас мощности при запуске и ограничение значения максимальных амплитуд при ироходе через резонанс.
Инерционные вибраторы с выдвижнымн дебалансами частично эти требования выиолняют. В известных вибраторах при вращении Вала вибратора со скоростью, соответствующей собственной частоте колебаний машины, т. е. при проходе через резонансную область и .ниже, вибраторы имеют малую неуравновешенность.
ками существующих вибраторов являются неполное уравновешивание в период разгона и выбега и большой ход удерлсивающен дебаланс пружины при достижении максимального кинетического момента.
Предложенный вибратор отличается от известных тем, что дебалансные грузы, один из которых выполнен составным, жестко укреплены на поворотном в вертикальной плоскости кронштейне, имеющем форму равнобедренного прямоугольного треугольника, причем дебалансные грузы расположены в вершинах острых углов треугольника, а через ве;ршину нрямого угла проходит ось горизонтального
вала, установленного на онорной площадке, укрепленной на свободном конце вращающегося вала.
Такое выполнение вибратора обеспечивает уравновешенность системы в неустановившемея режиме.
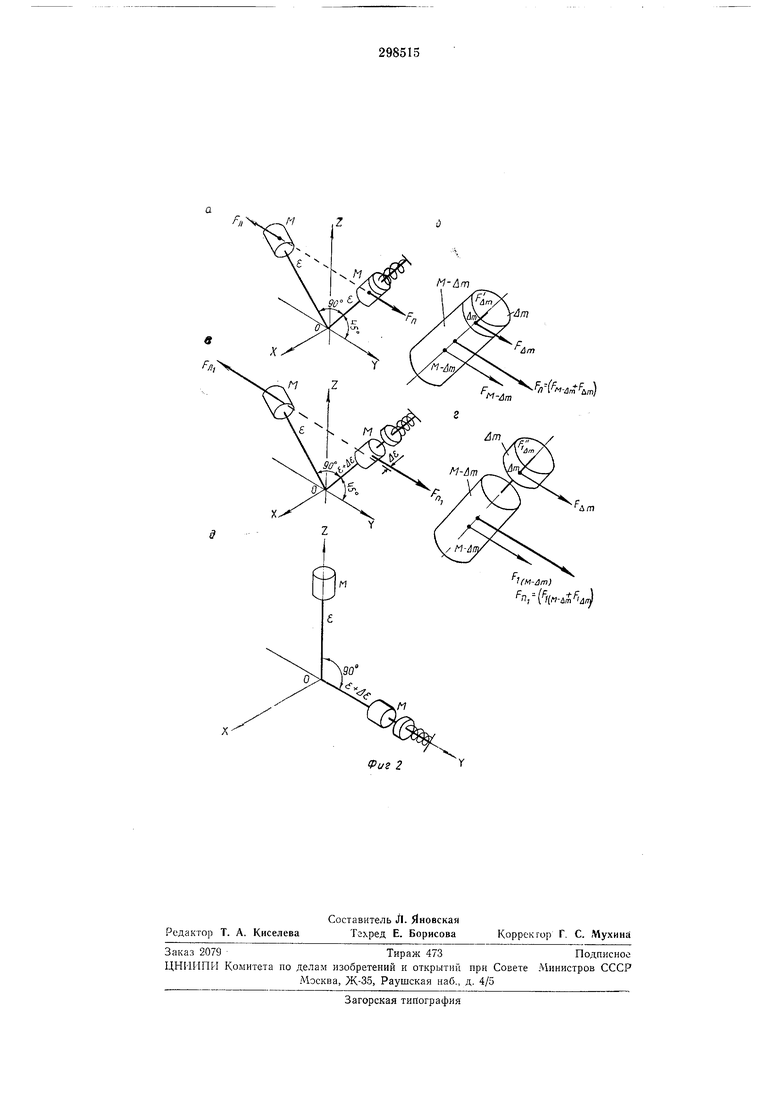
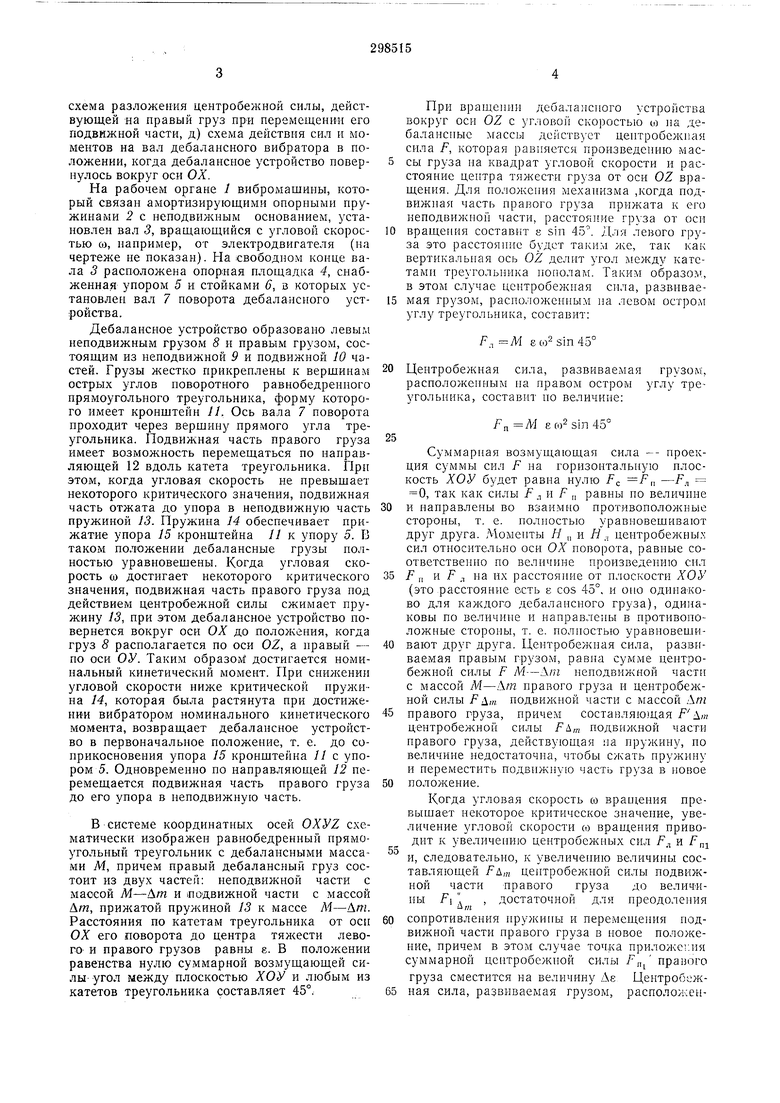
На фиг. 1 изображен предлагае.мый вибратор, общий вид; на фиг. 2 - а) схема действия сил н моментов на вал дебалансного вибратора в ноложении равновесия (при нулевой
величине возмущающей силы), б) схем,а разложения центробежной силы, действующей на правый груз в ноложении равновесия, в) схема действия сил и моментов на вал дебалансного вибратора в положении при перемесхема разложения центробежной силы, действующей на правый груз перемещении его подвижной части, д) схема действия сил и моментов на вал дебалансного вибратора в положении, когда дебалансное устройство повернулось вокруг оси ОЛ.
На рабочем органе 1 вибромашины, который связан амортизирующими опорными пружинами 2 с неподвил :ным основанием, установлен вал 5, вращающийся с угловой скоростью OJ, например, от электродвигателя (на чертеже не показан). На свободном конце вала .3 расположена опорная площадка 4, снабженная упором 5 и стойками 6, в которых установлен вал 7 поворота дебалансного устройства.
Дебалансное устройство образовано левы.м неподвижным грузом 8 п правым грузом, состоящим из неподвижной 9 и подвижной 10 частей. Грузы жестко прикреплены к вершинам острых углов новоротного равнобедренного прямоугольного треугольника, форму которого имеет кронштейн 11. Ось вала 7 поворота проходит через вершину прямого угла треугольника. Подвижная часть правого груза имеет возможность перемещаться по направляющей 12 вдоль катета треугольника. Hpii этом, когда угловая скорость не превышает некоторого критического значения, нодвил ная часть отжата до упора в неподвижную часть пружиной 13. Пружина 14 обеспечивает прижатие упора 15 кронштейна // к упору 5. В таком положении дебалансные грузы полностью уравновешены. Когда угловая скорость со достигает некоторого критического значения, подвижная часть правого груза нод действием центробежной силы сжимает пружину 13, при этом дебалансное устройство повернется вокруг оси ох до положения, когда груз 8 располагается по оси OZ, а правый - по оси ОУ. Таким образом достигается номинальный кинетический момент. При снилсении угловой скорости ниже критической нружина 14, которая была растянута при достижеНИИ вибратором номинального кинетического момента, возвращает дебалансное устройство в первоначальное положение, т. е. до соприкосновения упора 15 кронштейна 11 с упором 5. Одновременно по направляющей 12 перемещается подвижная часть правого груза до его упора в неподвижную часть.
В системе координатных осей ОХУ2 схематически изображен равнобедренный прямоугольный треугольник с дебалапсными массами М, причем правый дебалансный груз состоит из двух частей: неподвижной части с массой М-Дт и тюдвижной части с массой Дш, прижатой пружиной 13 к массе М-Дт. Расстояния по катетам треугольника от оси ОХ его поворота до центра тяжести левого и правого грузов равны е. В положении равенства нулю суммарной возмущающей силы-угол между плоскостью ХОУ и любым из катетов треугольника составляет 45°.
При вращении дебалаысиого устройства вокруг оси OZ с угловой скоростью О) на дебалансные массы действует центробежная сила F, которая равняется произведению массы груза на квадрат угловой скорости и расстояние центра тяжести груза от оси OZ вращения. Для положения механизма ,когда подвижная часть правого груза прижата к его 1 еподвижной части, расстояние груза от оси
вращения составит е sin 45. Для левого груза это расстояние будет таким же, так как вертикальная ось OZ делит угол междз катетами треугольника нополам. Таким образом, в этом случае центробежная снла, развиваемая грузом, расположеииым на левом остро.м углу треугольника, составит:
F.T М е 0)2 sin 45°
Центробежная сила, развиваемая грузом, раснологкенным на правом остром углу треугольника, составит но величине:
eco2sin45°
Суммарная возмущающая сила -- проекция суммы сил F на горизонтальную плоскость ХОУ будет равна нулю Ff. F 0, так как силы F., и F „ равны ио величине
и направлены во взаимио противоположные стороны, т. е. полностью уравновешивают друг друга. Моменты Я „ и /i., центробежны. сил относительно оси ОХ поворота, равные соответственно по величине ироизведепию сил
f п и f ,-, на их расстояиие от плоскости ХОУ (это расстояние есть в cos 45°, и оно одинаково для каждого дебалансиого груза), одинаковы по величине и направлены в противоположные стороны, т. е. полностью уравновепливают друг друга. Центробежная сила, развиваемая правым грузом, равна сумме центробежной силы F /И-А/п неподвижной части с массой yW-Am правого груза и центробежной силы F „1. подвижной части с массой Аш
правого груза, причем составляющая центробежной силы подвижной части иравого груза, действуюи1ая на пружину, по величине недостаточна, чтобы сжать пружину и переместить подвижную часть груза в новое
положение.
Когда угловая скорость со нрап1,ения превышает некоторое критическое значение, увеличение угловой скорости со приводит к увеличению центробежных сил F,, и f „j и, следовательно, к увеличению величины составляющей центробежной силы подвижной части правого груза до величины F. , достаточной для нреодоления
сопротивления пружины и перемещения подвижной части правого груза в иовое положение, причем в этом случае точка ириложе :ия суммарной центробежиой силы правого груза сместится на величину Де Центробеж9иг. 1
7
пым на левом остром углу треугольника, составит по величине:
л, М so)i2 sin 45°
Центробежная сила, развиваемая грузом, расноложенным на нравом остром углу треугольника, составит:
f „j--: М (е + Дв) 03(2 sin 45°
Суммарная возмущающая сила - проекция суммы сил F на горизонтальную плоскость ХОУ будет равна:
,,-r,M() со sin45- - Жгсо; sin45:z::/V/A ш sin45
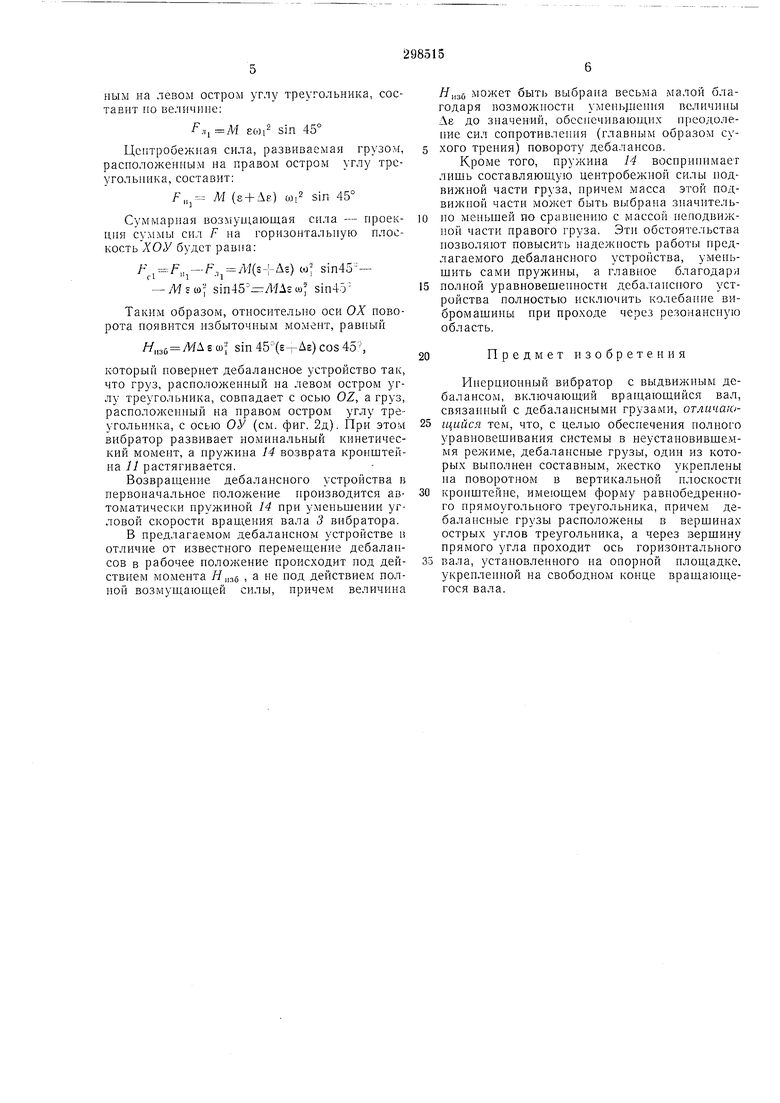
Таким образом, относительно оси ОХ новорота появится избыточным момент, равный
1зб Д со sin 45(ДЕ) cos 45,
который новернет дебалансное устройство так, что груз, расположенный на левом остром углу треугольника, совпадает с осью OZ, а груз, расположенный на нравом остром углу треугольника, с осью ОУ (см. фиг. 2д). При этом вибратор развивает номинальный кинетический момент, а пружина 14 возврата кронштейна 1 растягивается.
Возвращение дебалансного устройства в первоначальное положение производится автоматически пружиной 14 при уменьшении угловой скорости вращения вала 3 вибратора.
В предлагаемом дебалансном устройстве в отличие от известного перемещение дебалансов в рабочее ноложение происходит под действнем момента Яцзв - а не под действием полной возмущающей силы, причем величина
//„30 может быть выбрана весьма малой благодаря возможности умень}11ення величины Де до значений, обеспечивающих преодоление сил сопротивления (главным образом сухого трения) повороту деба.лансов.
Кроме того, пружина 14 воспрИ1И1мает лищь составляющую центробежной силы подвижной части груза, причем масса этой подвижной части может быть выбрана значительно меньшей ио сравнению с массой неподвижной части правого груза. Этн обстоятельства позволяют повысить падежпость работы предлагаемого дебалансного устройства, уменьщить сами пружины, а главное благодари
полной уравновешенности дебаланспого устройства полностью исключить колебание вибромащины при проходе через резонансную область.
Предмет изобретения
20
Инерционный вибратор с выдвижным дебалансом, включающий вращающийся вал, связанный с дебалансными грузами, отличающийся тем, что, с целью обеспечения полного уравновешивания системы в неустановивщеммя режиме, дебалансные грузы, один из которых вынолнен составным, жестко укреплены на поворотпом в вертикальной плоскости
кронштейне, имеющем форму равнобедренного прямоугольпого треугольника, причем дебалапсные грузы расноложены в вершинах острых углов треугольника, а через вершину прямого угла проходит ось горизонтального
вала, установленного на опорной нлощадке, укрепленной на свободном конце вращающегося вала.
Лт
йт
..Г --- -)
д/п
Т()
n,-(ff(n-t,
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ ВИБРАТОР | 1971 |
|
SU298381A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ИЗДЕЛИЙ НА ВИБРАЦИЮ | 1973 |
|
SU403984A1 |
| ИНЕРЦИОННЫЙ ВИБРАТОР ДЛЯ ВЕРТИКАЛЬНЫХ ВИБРАЦИОННЫХ КОНВЕЙЕРОВ | 1970 |
|
SU261977A1 |
| СПОСОБ УПРАВЛЕНИЯ ВОЗДЕЙСТВУЮЩЕЙ СИЛОЙ (ВАРИАНТЫ) И РЕГУЛИРУЕМЫЙ ВИБРАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531518C1 |
| Вибровозбудитель | 1986 |
|
SU1676669A1 |
| СПОСОБ НАПРАВЛЕННОГО ИНЕРЦИОННОГО ВИБРОВОЗБУЖДЕНИЯ И ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ НАПРАВЛЕННОГО ДЕЙСТВИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2528715C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕГУЛИРУЕМЫЙ ВИБРАТОР | 2004 |
|
RU2295396C2 |
| Конусная инерционная дробилка | 1990 |
|
SU1766505A1 |
| ДЕБАЛАНСНЫЙ ВИБРОВОЗБУДИТЕЛЬ | 2006 |
|
RU2324547C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |