Предлагаемый способ предназначен для определения взаимного положения двух изображений. Такая задача решается в навигационных устройствах, в ряде вычислительных устройств для автоматической настройки аппаратуры и контроля различных технологических и производственных процессов.
Известны способы определения взаимного положения двух сравниваемых изображений с помощью оптической корреляции. Эти способы позволяют определять угловые рассогласования между сравниваемыми объектами вокруг оптической оси коррелятора только при использовании сложного эталонного изображения (двойного). Это приводит к необходимости применения очень сложных фотоэлектронных и радиоэлектронных устройств.
Предлагаемый способ позволяет достаточно просто определять кроме плоскостных смещений и угловые рассогласования двух изображений без использования сложного эталонного изображения.
Это достигается тем, что в предлагаемом способе для исследования угловых рассогласований двух изображений применяется непрерывное сканирование эталонного изображения относительно сравниваемого вокруг оптической оси коррелятора, преобразование оптического сигнала в электрический и его фазочувствительное детектирование.
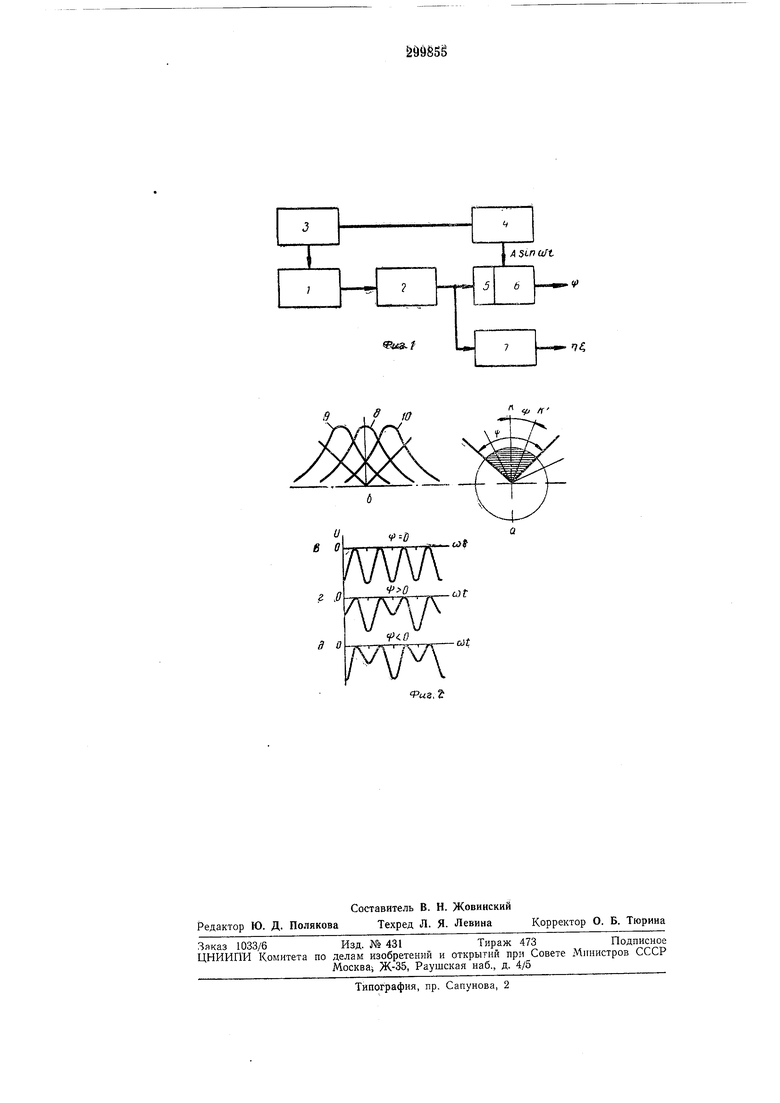
На фиг. 1 показана блок-схема одного из вариантов устройства, осуществляющего предлагаемый способ определения угловых рассогласований; на фиг. 2 приведены схема сканирования эталонного изображения и диаграммы, поясняющие основной принцип определения угловых рассогласований г|;.
В данном устройстве при определении взаимного положения двух изображений плоскостные смещения (вверх, вниз, влево, вправо) одного изображения относительно другого определяются путем корреляции (сравнения) исследуемого и эталонного оптических изображений в оптическом корреляторе /. Выходной
5 сигнал последнего подается на фотоэлектронный преобразователь 2, где превращается з пропорциональный ему электрический сигнал, который содержит информацию о плоскостных смещениях. Затем эта информация извлекается дифференциальным методом. При реализации предлагаемого способа в устройстве для определения угловых рассогласований между сравниваемыми изобрал енпями вокруг оптической оси используют блок 3 скани5 рованпя эталонного изображения, связанный с оптическим коррелятором / и с генератором 4 опорного напряжения, фильтр 5 низких частот и фазочувствптельпый детектор 6, связанные со схемой 7 определения. На диаграммах,
по ф (см. фиг. 26), обозначены: 8 - отсутствие сдвига функции взаимной корреляции в процессе сканирования при отсутствии рассогласования; 9, 10 - наличие сдвигов функции взаимной корреляции в процессе сканирования при ±г( соответственно.
Как видно из фиг. 26, в процессе сканирования эталонного изображения в жестко фиксированном угле ф (фиг. 2а) при наличии угловых рассогласований будет наблюдаться амплитудная модуляция сигнала с выхода фотоэлектронного преобразователя 2; такой модуляции не наблюдается при отсутствии угловых рассогласований (фиг. 2в, г, д).
При изменении знака и величины угла рассогласования двух изображений, фаза огибающей сигнала меняется на 180°, а глубина амплитудной модуляции изменяется пропорционально величине углового рассогласования.
Для выделения огибающей сигнала, несущей информацию об угловом рассогласовании, напряжение с фотоэлектронного преобразователя 2 при сканировании эталонного изображения подается на фильтр 5 низкой частоты. Далее эта огибающая поступает на фазочувствительный детектор 6, в котором она сравнивается с опорным напряжением от генератора 4.
Полярность выходного напряжения фазбчувствительного дискриминатора зависит от
фазы огибающей сигнала, а величина этого
напряжения пропорциональна величине углового рассогласования.
Таким образом, применение данного способа позволяет с помощью очень простой радиоэлектронной и фотоэлектронной части определять с высокой точностью достаточно большие угловые рассогласования.
Предмет изобретения
Способ определения угловых рассогласований изображениями, одно из которых является эталонным, с использованием оптической корреляции, сканирования и фазочувствительного детектирования относительно
опорного напряжения, отличающийся тем, что, с целью упрощения выделения сигнала ошибки, производят непрерывное сканирование эталонного изображения вокруг продольной оси в пределах жестко фиксированного угла, оптический сигнал корреляции преобразуют в гармонический электрический сигнал, который подвергают фазочувствительному детектированию.
S Iff
a 0
ffj П 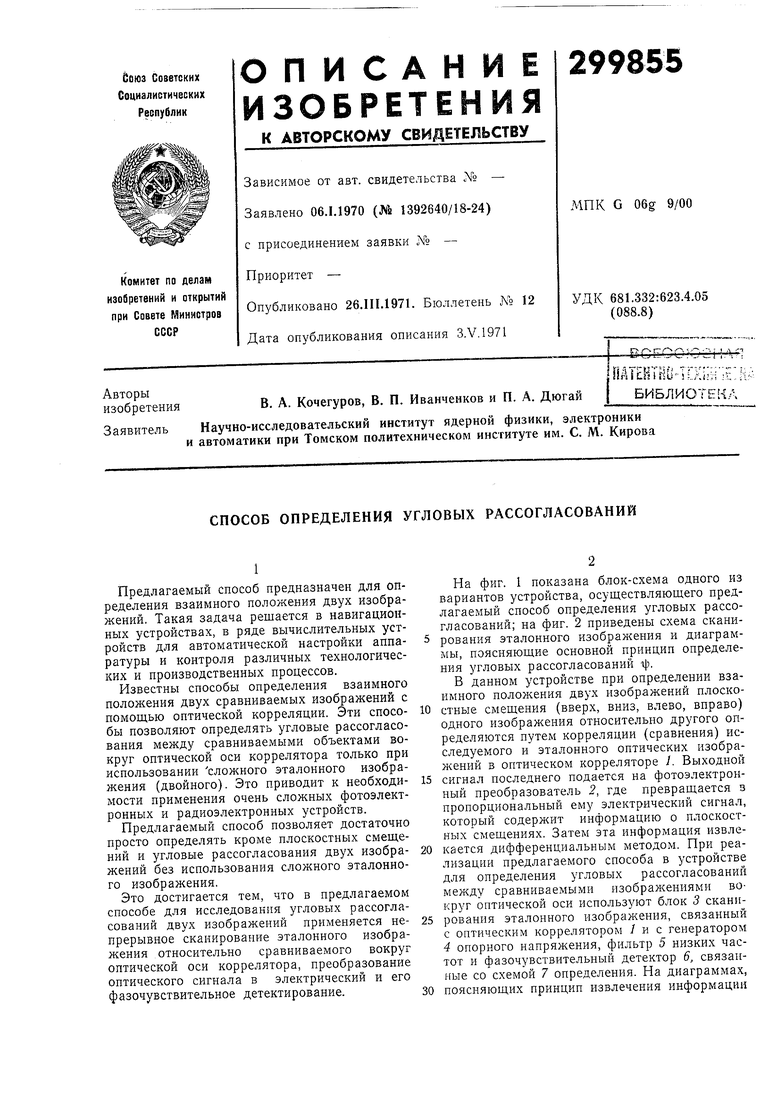
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОРИЕНТИРОВКИ ОПТИЧЕСКОГО КОРРЕЛЯТОРА | 1970 |
|
SU260210A1 |
| Оптический корреляционный координатор | 1973 |
|
SU443396A1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР ДЛЯ ОПРЕДЕЛЕНИЯ РАССОГЛАСОВАНИЯ | 1971 |
|
SU305493A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО РАССОГЛАСОВАНИЯ МЕЖДУ ДВУМЯ ОПТИЧЕСКИМИ ИЗОБРАЖЕНИЯМИ | 1969 |
|
SU241029A1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР1 БИ6/: | 1972 |
|
SU328479A1 |
| ВСЕСОЮ _|пдтейтнп'^;;х^^^^^^^^; | 1972 |
|
SU332474A1 |
| Дактилоскопический электронный замок | 1983 |
|
SU1201472A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИЗОБРАЖЕНИЯ СО СЛУЧАЙНЫМ РАСПРЕДЕЛЕНИЕМ | 1973 |
|
SU378896A1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 1971 |
|
SU302734A1 |
| СПОСОБ ИЗМЕРЕНИЯ НЕРАВНОМЕРНОСТИ СКОРОСТИ ВРАЩЕНИЯ ОБЪЕКТА | 1971 |
|
SU301622A1 |