1
Изобретение относится к онециализированным средствам вычислительной техники для измерения параметров движения, широко применяемой во всех отраслях науки и техники. На основе изобретения могут быть созданы устройства для навигации летательных аппаратов относительно подстилающей поверхности или неподвижной среды, для бесконтактного измерения параметров движущихся сред с различными целями (ннпример, измерение скорости -проката, введение ноправки при аэрофотосъемке, для счисления пути и т. д.).
Известен корреляционный способ определения скорости движения изображения, при котором находят время транспортного запаздывания, обратно пропорцнолальное скорости движения изображения при экстремуме взаимно корреляционной функции (ВКФ). Для введения в коррелятор реализаций яркостей изображения применяют два приемника, расположенные друг за другом но направлению движения на известном расстоянии.
Цель иВобретения - измерение угла сноса нри перемещении изображения.
Это достигается тем, что измерительную базу фиксируют строками, разнесенными на величину кадра, запоминают строчные сигналы, находят функцию взаимной корреляции между строчными сигналами базовых строк и между первым запомненным строчным сигналом и последующими разделенными с первым кадровым периодом, фиксируют момент появления экстремума корреляционной функции в кадровом периоде, сдвигают второй
строчной сигнал и величину интервала задержки экстремума корреляционной функции в кадровом периоде, фиксируют момент появления экстремума корреляционной функции в строчном периоде и нелинейно преобразуют
интервалы задержки ,в выходные сигналы.
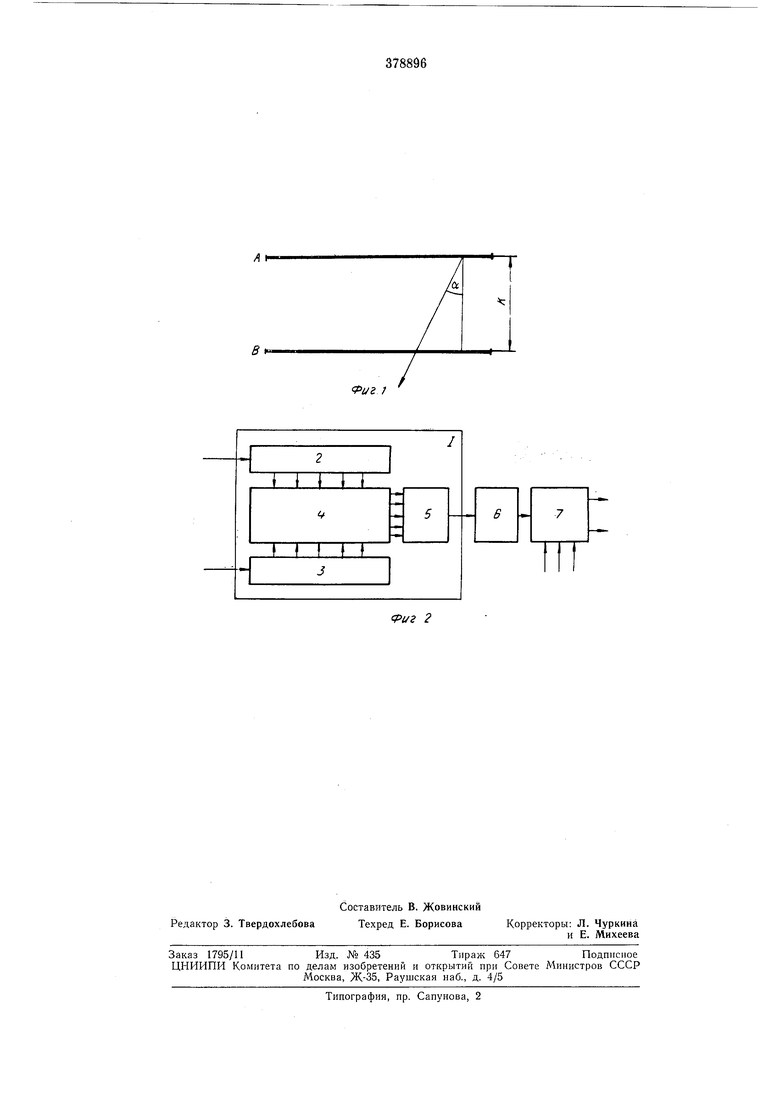
Иа фиг. 1 изображена картипа сканирования движущегося изображения; на фиг. 2 - блоксхема, реализующая предлагаемый способ. Сканирование набегающего изображения
осуществляют двумя параллельными считывающими строками Л и В, отстоящими друг от друга на кадровое расстояние К. Коррелятор / выполняют на регистрах 2 и 3, на норазрядной схеме 4 перемножения (для соответствующих разрядов регистров) и сумматоре 5 выходных сигналов поразрядной схемы перемножения. Указатель 6 экстремума выдает сигнал экстремума ВКФ, момент появления которого относительио выбранного начала отсчета определяет скорость и угол сноса изображения. Обработка сигнала экстремума осуществляется блоком 7 .выделения момента появления экстремума и преобразования.
При принятой картине сканирования удается навлечь информацию об угле сноса изображения в корреляторе параллельного действия. Реализацию :разложеиия изображения строки А синхронно записывают в регистр 2 коррелятора 1, где она хранится на цикле измерения (кадровый период). Реализации разложений изображения строки В синхронно записывают в регистр 5 коррелятора I, прич-ем всякая предыдущая строка выталкивается последующей. Значения одноименных разрядов обоих регистров непрерывно .перемножают поразрядно, а результаты перемножения суммируют в сумматоре 5, т. е. находят величину, Пропорциональную ВКФ двух реализаций изображения а реальном масштабе времени.
ВКФ подают на указатель момента времени появления экстремума, который выдает импульс в момент появления экстремума. Экстпропорциональную ВКФ двух реализаций изображения на кадровый размер /С. Таким образом, происходит идентификация изображения с эталоном, как в корреляционных читающих автоматах.
При движении изображения строго перпендикулярно направлению строк появление экстремума ВКФ возможно только в момент окончания считывания строки, т. е. в момент отсутствия сдвигов реализаций в сдвиговых регистрах относительно друг друга. При другом направлении движения требуется центрирование реализаций, которое осуществляется автоматически при записи реализаций в сдвиговый регистр 3 коррелятора. РезультатОМ центрирования является получение момента появления экстремума ВКФ в строчном периоде. Длительность интервала времени в строчном периоде до этого момента является мерой тангенса угла а сноса изображений. Знак угла определяется по направлению смещения экстремума относительно окоичания цикла
строчной развертки. Точное значение времени транспортного запаздывания, обратно пропорциональное скорости движения изображения, находят путем умножения измеренного времени транспортного запаздывания и на косинус угла сноса а.
Таким образом, при принятой частоте циклов измерения параметров движения изображений, время транспортного запаздывания определяют моментом появления экстремума ВКФ в кадровом периоде, а угол сноса - в строчном периоде в блоке 7, управляемом тактовой, кадровой и строчной последовательностями импульсов.
Предмет изобретения
Способ измерения параметров движения изображения со случайным распределение м
яркостей посредством оценки положения экстремума корреляционной функции двух сигналов строчно-кадрового растра, отличающийся тем, что, с целью измерения угла сноса при перемещении изображепия, измерительную базу фиксируют строками, разнесенными на величину кадра, запоминают строчные сигналы, находят функцию взаимной корреляции между строчными сигналами базовых строк и между первым запомненным строчным сигналом и последующими разделенными с первы.м .кадровым периодом, фиксируют момент появления экстремума корреляционной функции в кадровом пер.иоде, сдвигают второй строч.ной сигнал и величину интервала задержки экстремума корреляционной функции в кадровом периоде, фиксируют момент появления экстремума корреляционной функции в строчном пер.иоде и нелинейно преобразуют интервалы задержки в выходные сигналы.
Af
8
7
иг J
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров движения изображения со случайным распределением яркостей | 1976 |
|
SU588547A1 |
| Способ определения скорости движения и угла сноса изображения | 1977 |
|
SU703838A1 |
| Устройство для измерения параметров движения контрастного изображения | 1976 |
|
SU649172A1 |
| Устройство для определения параметров движения изображения | 1981 |
|
SU994993A1 |
| Устройство для определения параметров движения изображения | 1981 |
|
SU994994A1 |
| Устройство для измерения перемещения объектов | 1974 |
|
SU563743A1 |
| Устройство для считывания и определения параметров движения констрастного изображения | 1976 |
|
SU717796A1 |
| Устройство для измерения перемещения объектов | 1982 |
|
SU1045411A1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2153235C2 |
| Устройство для определения параметров движения контрастного изображения | 1974 |
|
SU484533A1 |
2
