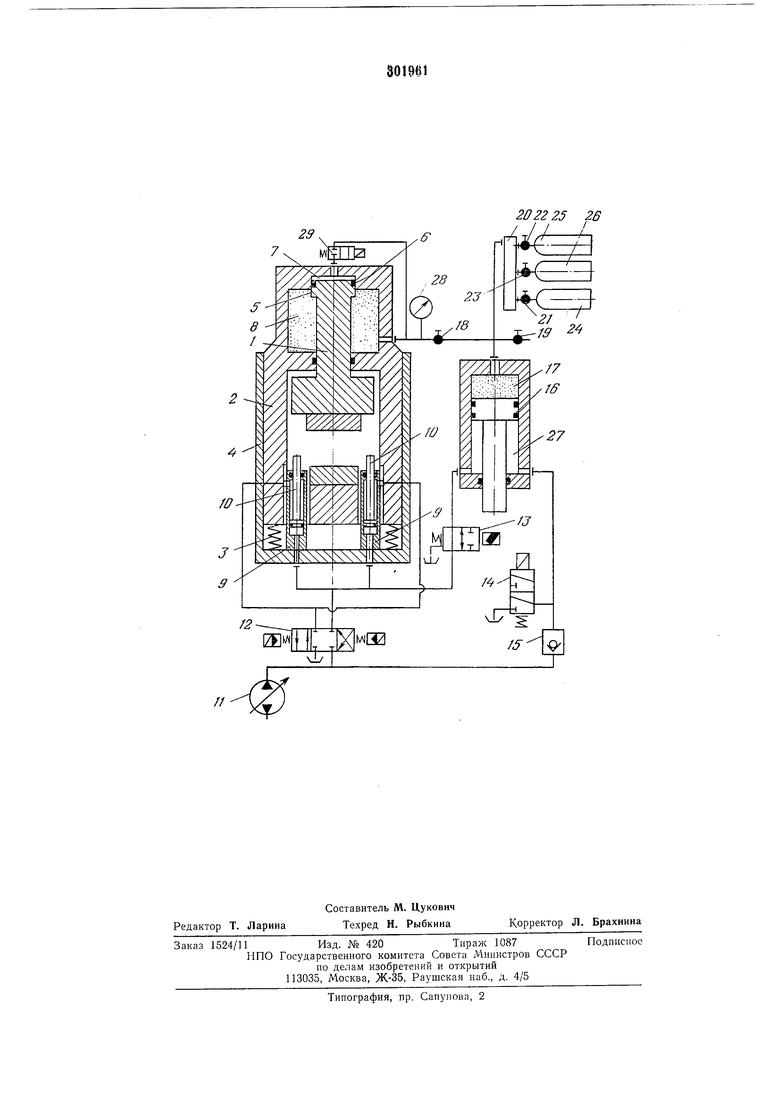
Изобретение относится к области молотостроения. Известен привод высокоскоростного молота, содержащий выполненный в виде ресивера рабочий цилиндр, соединенный посредством трубоировода и установленного в нем датчика давления с воздушным аккумулятором и пневмосетью, а также гидронасос, соединенный трубопроводом через распределительный золотник с полостями возвратных цилиндров Предлагаемый привод отличается от известного тем, что он снабжен соединенным с гидронасосом гидропневматическим аккумулятором, воздушная полость которого подключена к трубопроводу, соединяюш,ему рабочий цилиндр молота с воздушным аккумулятором и пневмосетью. Такое выполнение высокоскоростного молота позволяет изменять объем рабочего цилиндра, а следовательно, и давление газа в нем и благодаря датчику держать это давление постоянным во время работы. Используя гидропривод и газовую полост)) аккумулятора, который в данном случае становится как бы газовым насосом, можно, поочередно открывая и закрывая запорные устройства, соединяюш;ие рабочий цилиндр высокоскоростного молота с баллонами, перекачивать газ из баллонов в рабочий цилиндр и обратно. Подключив газовую полость к пневмосети и пользуясь запорными устройствами, можно аполнить рабочий цилиндр воздухом более высокого давления, чем давление в пневмосети. Это увеличивает производительность и КПД привода. На чертеже представлена схема высокоскоростного молота с насосно-аккумуляторным приводом. Высокоскоростной молот состоит из бабы 1 и рамы 2, которая подвешена на амортизаторах 3 и свободно перемещается в направля ош,их станины 4. Шток бабы 1 в верхней части оканчивается поршнем 5 с уплотнением 6, входящим в проточку 7 рабочего цилиндра 8, который является составной частью рамы 2. Па станине 4 закреилены подъемные цилиндры 9, штоки 10 которых, упираясь в бабу 1, возвращают ее в исходное перед ударом положение. Гидравлический привод состоит из насоса 11, управляющих золотников 12, 13, 14, обратного кланана 15, аккумулятора 16, верхняя полость 17 которого является газовой и соединена с помощью трубопроводов и запорных устройств 18 и 19 с рабочим цилиндром и пневмосетью, а через коллектор 20 и запорные устройства 21, 22, 23 - с баллонами 24, 25, 26.
Дийейа с иДpйcйcreмoй. Давлёййе fe рабочем цилиндре контролируется датчиком 28 давления, а для управления ударом служит клапан 29.
Молот работает следующим образом. Через клапан управления 29 давление подается в проточку 7, и баба летит вниз, производя удар. Жидкость от насоса 11 через золотник 12 подается в нижние полости подъемных цилиндров 9, штоки 10 которых, упираясь в бабу 1, поднимают ее вверх. Одновременно жидкость из нижней полости 27 аккумулятора 16 под действием давления газа рабочего цилиндра через золотник 13 также проходит в нижние полости цилиндров 9 подъема, в результате чего значительно уменьшается время на подъем бабы. После того как баба 1 уперлась в дно проточки 7, жидкость от насоса 11 через золотники 12 и 13 поступает в нижнюю полость 27 аккумулятора 16 - происходит зарядка аккумулятора и изменение объема газовой полости 17, а следовательно, изменение давления в рабочем цилиндре 8. Когда давление газа достигнет давления настройки датчика 28, переключается золотник 12, и насос И начинает нагнетать жидкость в верхние полости цилиндра 9 подъема, штоки 10 которых уходят вниз, и молот готов к следующему удару.
Для перекачки газа, например, из рабочего цилиндра 8 в баллон 25 поступают следующим образом. Сначала перекрывают запорное устройство 22 и открывают запорное устройство 18. Нижняя полость 27 аккумулятора 16 при этом заполнена жидкостью до упора. Затем переключают золотник 14, и жидкость из нижней полости 27 аккумулятора 16 под действием давления газа вытесняется, а верхняя полость 17 заполняется газом из рабочеГО цилиндра. Закрыв запорное устройство 18 и открыв запорное устройство 22, подают давление от насоса 11 при запертом золотнике 14 в нижнюю полость 27. Газ из верхней полости 17 начинает вытесняться в баллон 25. Эта операция повторяется до тех пор, пока давление в рабочем цилиндре не приблизится к атмосферному. Изменив последовательность закрытия и открытия запорных устройств, можно перекачивать газ из баллона в рабочий цилиндр.
Для заполнения рабочего цилиндра воздухом из пневмосети поступают следующим образом. Открыв запорные устройства 18 и 19, наполняют рабочий цилиндр сжатым воздухом. Затем, закрыв устройство 18, наполняют газовую полость 17 аккумулятора, а открыв устройство 18 и закрыв устройство 19, перекачивают сжатый воздух в рабочий цилиндр 8. Проделав эту операцию несколько раз, можно достичь в рабочем цилиндре необходимое давление.
Формула изобретения
Привод высокоскоростного молота, соде-ржап ий выполненный в виде ресивера рабочий цилиндр, соединенный посредством трубопровода и установленного в нем датчика давления с воздушным аккумулятором и пневмосетью, а также гидронасос, связанный трубопроводом через распределительный золотник с полостями возвратных цилиндров, отличающийся тем, что, с целью увеличения производительности и КПД, он снабжен соединенным с гидронасосом гидропневматическим аккумулятором, воздушная полость которого подключена к трубопроводу, соединяющему рабочий цилиндр молота с воздушным аккумулятором и пневмосетью.
J 8
2О2225 26
I I
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод высокоскоростного молота | 1975 |
|
SU816647A1 |
| КУЗНЕЧНЫЙ МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2012 |
|
RU2505375C1 |
| Привод высокоскоростного молота | 1984 |
|
SU1180135A1 |
| ГИДРОПРИВОД МОЛОТА | 1971 |
|
SU305950A1 |
| СВАЙНЫЙ МОЛОТ | 2005 |
|
RU2310723C2 |
| БЕСШАБОТНЫЙ ВЫСОКОСКОРОСТНОЙ МОЛОТ | 1973 |
|
SU381450A1 |
| Высокоскоростной горизонтальный штамповочный молот с двухсторонним ударом | 1977 |
|
SU732065A1 |
| Высокоскоростной молот | 1977 |
|
SU620321A1 |
| МОЛОТ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ | 2006 |
|
RU2364462C2 |
| ПРИВОД ВЫСОКОСКОРОСТНОГО МОЛОТА | 1973 |
|
SU404536A1 |