Изобретение относится к измерительной технике и может быть использовано для определения динамической неуравновешенности тел, преимущественно нежесткой конструкции.
Известны снособы определения динамической неуравновешенности тел, при которых установленное в кардановый подвес тело приводят в движение и измеряют его отклонения (амплитуду и фазу колебаний), возникающие от действия дисбаланса.
Однако нри определении неуравновешенности тел нежесткой конструкции возникают их нагибные колебания, что усложняет процесс измерения неуравновешенности.
Предложенный способ отличается от известных тем, что тело устанавливают в трехстепенном карданном подвесе так, что оси подвеса совпадают с его строительными осями, вращают подвес относительно вертикальной оси и одновременно новорачивают тело относительно его продольной оси и измеряют максимальное отклонение тела от горизонтального положения, по величине которого судят о его неуравновешенности.
Это позволяет упростить и ускорить процесс определения неуравновешенности тел нежесткой конструкции.
мости от угла его поворота относительно продольной оси.
Жесткая рама / вращается от 1о:сительно вертикальной оси 2 в нодшинниках /1 На верхних концах рамы в нодшипннках 4 установлена корзииа 5, в которой размен1,ают исследуемое тело с возможностью вращения корзины относительно ее продольной оси 6. Па раме установлен датчик 7 угла поворота, фикснрующий отклонение корзины от горизонтального ноложения.
Тело, величину динамической неуравновешенности которого необходимо определить, устанавливают в корзину 5 таким образом,
чтобы центр тяжести его находился иа пересечении вертикальной оси 2 и оси подшипников 4. После этого раму вместе с корзииоп 5 и исследуемым телом прпводят во вращение вокруг вертикальной оси 2, а тело со скоростью порядка 0,03 рад/сек вращают относительно оси 6.
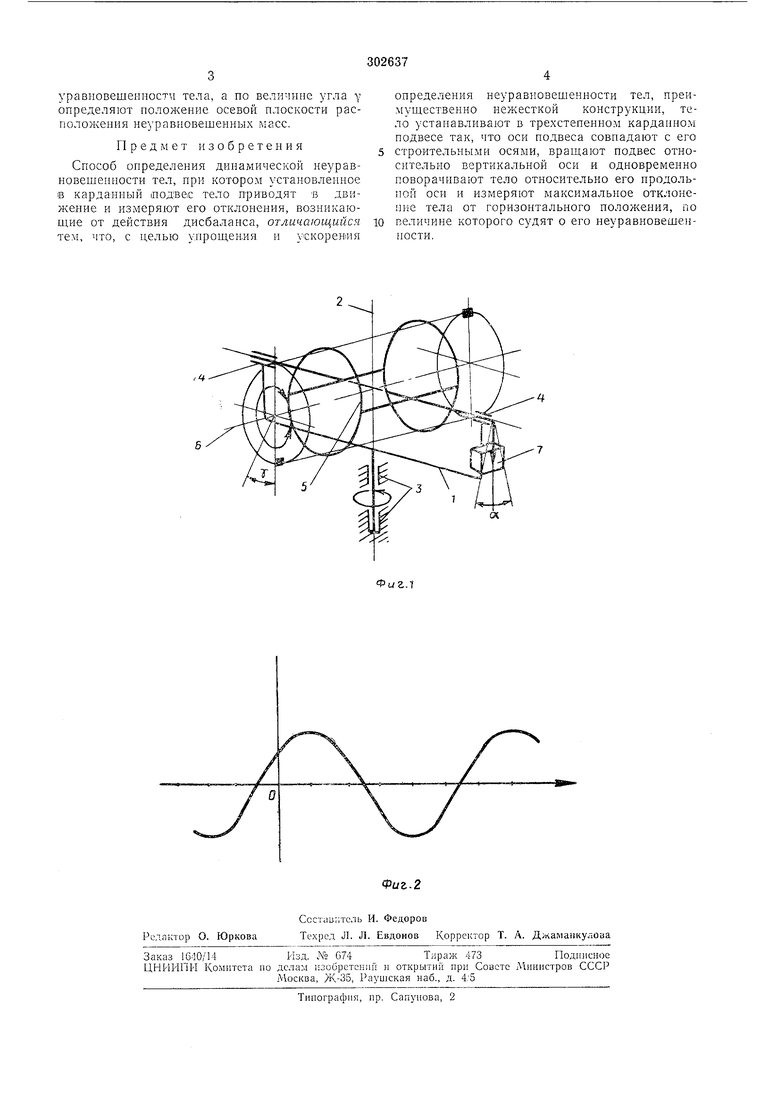
При наличии динамической неуравновешенности тело вместе с корзиной 5 поворачивается на некоторый угол а относительно оси
подшипников 4, при этом величина угла а в зависимости от угла у иоворота тела относительно его продольной осн 6 изменяется по синусоидальному закону (см. фиг. 2). Амплитудному значению угла сх будет соответствоуравновешенности тела, а по величнне угла v определяют ноложение осевой плоскости расположения неуравновешенных масс.
Предмет изобретения
Способ определения динамической неуравновешенности тел, при котором установленное в карданный подвес тело приводят в движение и измеряют его отклонения, возникающие от действия дисбаланса, отличающийся тем, что, с целью упрошен.ия и ускорения
определения неуравновешенности тел, преимушественно нежесткой конструкции, тело устанавливают в трехстепенном карданном подвесе так, что оси подвеса совпадают с его строительными осями, вращают подвес относительно вертикальной оси и одновременно поворачивают тело относительно его продольной оси и изглеряют максимальное отклонение тела от горизонтального положения, по величине которого судят о его неуравновешенности.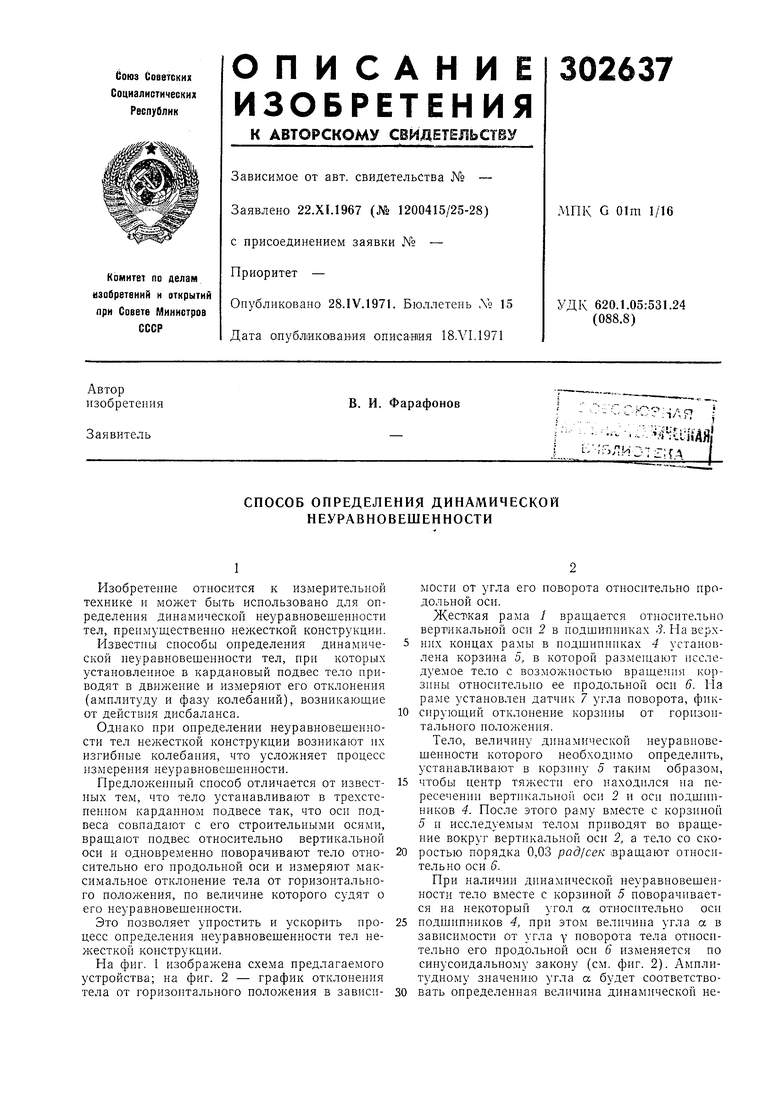
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТНОЙ НЕУРАВНОВЕШЕННОСТИ ТЕЛ ВРАЩЕНИЯ | 1998 |
|
RU2147732C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТНОЙ НЕУРАВНОВЕШЕННОСТИ ТЕЛ ВРАЩЕНИЯ | 2004 |
|
RU2257557C1 |
| Устройство для измерения углов отклонения подвижного объекта | 1991 |
|
SU1810756A1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1994 |
|
RU2117917C1 |
| Способ идентификации тензора присоединенных моментов инерции тела и устройство для его осуществления | 2018 |
|
RU2688964C1 |
| Способ измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805425C1 |
| Способ балансировки трехстепенного гироскопа в кардановом подвесе | 1990 |
|
SU1795286A1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Испытательный стенд для настройки беспилотных летательных аппаратов мультироторного типа | 2023 |
|
RU2804156C1 |
| СТАБИЛИЗИРОВАННОЕ ТЕПЛОВИЗИОННОЕ УСТРОЙСТВО НАВЕДЕНИЯ | 1995 |
|
RU2099750C1 |
