Изобретение относится к точному приборостроению, а именно к гироскопической технике, и может быть использовано для измерения угла поворота летательного аппарата при маневрах в горизонтальной плоскости.
Известен способ измерения угла поворота летательного аппарата в горизонтальной плоскости, который реализован в различных типах гирополукомпасов и, в частности, в гирополукомпасе ГПК-52 (Михайлов О.И., Козлов И.М., Гергель Ф.С. Авиационные приборы. М.: Машиностроение, 1977, стр. 166). Способ состоит в том, что в трехстепенном гироскопе с осью наружной рамы, расположенной параллельно нормальной оси летательного аппарата, содержащем систему горизонтальной коррекции, компенсируют методическую погрешность в измерении угла поворота от действия вертикальной составляющей угловой скорости вращения Земли относительно своей оси с помощью специального момента, приложенного к оси подвеса гироузла. Для этого измеряют (или задают) текущую широту и формируют данный момент пропорционально синусу угла широты. Угол поворота летательного аппарата измеряют по взаимному положению ротора датчика угла, жестко закрепленного на оси наружной рамы, и статора, расположенного на корпусе.
Однако при измерении угла поворота во время выполнения виража (поворота) ось наружной рамы гирополукомпаса, ориентированная по нормальной оси летательного аппарата, будет отклоняться от вертикали места на угол крена. При этом возникает погрешность, которая носит геометрический характер, и называется кардановой погрешностью
где  угол поворота в горизонтальной плоскости;
угол поворота в горизонтальной плоскости;  угол крена;
угол крена;  кардановая погрешность.
кардановая погрешность.
Известен способ измерения угла поворота летательного аппарата в горизонтальной плоскости, принятый за прототип и реализованный в различных типах курсовых систем, например, в курсовой системе КС-6, в которой гирополукомпас (гироагрегат ГА-1М) наружной рамой установлен в следящую раму, корректируемую по сигналам гировертикали по углу крена (Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации / Ю.А. Акиндеев, В.Г. Воробьев, А.А. Карчевский и др.; Под общ. ред. П.А. Иванова. М.: Машиностроение, 1989. – 344с. Стр.89-93). Способ состоит в том, что для компенсации кардановой погрешности наружную раму гирополукомпаса помещают в следящую раму, ось подвеса которой направляют параллельно продольной оси летательного аппарата. Измеряют угол рассогласования между углом отклонения следящей рамы относительно корпуса и углом крена, измеренного гировертикалью, пропорционально углу рассогласования формируют момент относительно оси подвеса следящей рамы. При этом ось подвеса наружной рамы гирополукомпаса будет независимо от угла крена оставаться на вертикали места (с точностью до погрешностей гировертикали и работы следящей системы), а, следовательно, не будет причины возникновения кардановой погрешности.
Недостатком данного способа измерения угла поворота летательного аппарата является значительное конструктивное усложнение при его реализации, которое не обеспечивает эквивалентное повышение точности и надежности измерения угла поворота.
Технический результат, на достижение которого направлено заявленное изобретение, заключается в упрощении конструктивных решений, повышении надежности и точности при компенсации кардановой погрешности за счет алгоритмического подхода, путем использования информации об измерении угловых скоростей летательного аппарата относительно нормальной и поперечной осей.
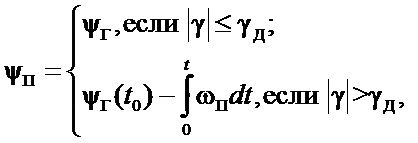
Технический результат достигается тем, что в способе измерения угла поворота летательного аппарата в горизонтальной плоскости, включающем измерение угла крена и угла поворота относительно его нормальной оси, новым является то, что дополнительно измеряют угловые скорости по нормальной и поперечной осям летательного аппарата, а его угол поворота в горизонтальной плоскости формируют в соответствии с формулой
 (2)
(2)
где  текущий угол поворота, измеряемый относительно нормальной оси летательного аппарата;
текущий угол поворота, измеряемый относительно нормальной оси летательного аппарата;  угол поворота, измеряемый относительно нормальной оси, на момент выполнения условия
угол поворота, измеряемый относительно нормальной оси, на момент выполнения условия  ;
;  действительный и допустимый углы крена;
действительный и допустимый углы крена;  угловая скорость поворота вокруг местной вертикали;
угловая скорость поворота вокруг местной вертикали;  угловые скорости, направленные по нормальной и по поперечной осям летательного аппарата соответственно.
угловые скорости, направленные по нормальной и по поперечной осям летательного аппарата соответственно.
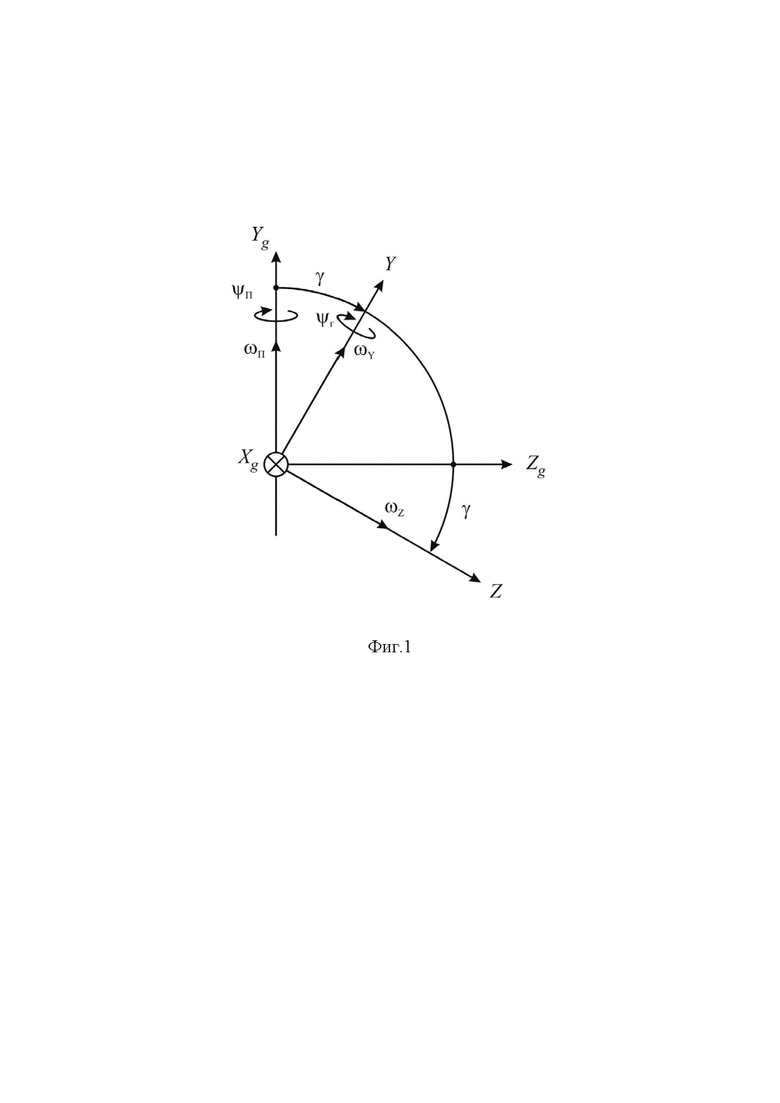
Существо способа поясняет схема, приведенная на фиг. 1, на которой приняты следующие обозначения:
 ось местной вертикали;
ось местной вертикали;
 плоскость местного горизонта;
плоскость местного горизонта;
 нормальная ось летательного аппарата;
нормальная ось летательного аппарата;
 поперечная ось летательного аппарата;
поперечная ось летательного аппарата;
 угол поворота летательного аппарата в горизонтальной плоскости;
угол поворота летательного аппарата в горизонтальной плоскости;
 угол поворота летательного аппарата относительно нормальной оси;
угол поворота летательного аппарата относительно нормальной оси;
 угол крена летательного аппарата;
угол крена летательного аппарата;
 угловая скорость поворота летательного аппарата относительно оси местной вертикали;
угловая скорость поворота летательного аппарата относительно оси местной вертикали;
 угловая скорость летательного аппарата относительно нормальной оси местной вертикали;
угловая скорость летательного аппарата относительно нормальной оси местной вертикали;
 угловая скорость летательного аппарата относительно поперечной оси.
угловая скорость летательного аппарата относительно поперечной оси.
На фиг. 1 направления всех угловых скоростей и отклонение по углу крена указаны положительные. При левом повороте  и, соответственно,
и, соответственно,  При правом повороте
При правом повороте  и, соответственно,
и, соответственно, 
Описание схемы, приведенной на фиг. 1. Рассматривать будем горизонтальный полет летательного аппарата.
На фиг. 1 показаны оси  нормальной системы координат и оси XYZ связанной системы координат. Ось
нормальной системы координат и оси XYZ связанной системы координат. Ось  направлена по местной вертикали, а оси
направлена по местной вертикали, а оси  и
и  занимают произвольное положение в горизонтальной плоскости. Продольная ось ЛА
занимают произвольное положение в горизонтальной плоскости. Продольная ось ЛА  совпадает с осью
совпадает с осью  . При этом летательный аппарат совершает поворот с креном
. При этом летательный аппарат совершает поворот с креном  и угловой скоростью
и угловой скоростью  проекции которой на оси
проекции которой на оси  и
и  равны
равны  и
и  соответственно. В соответствии с фиг. 1 по измеренным
соответственно. В соответствии с фиг. 1 по измеренным  может быть определена угловая скорость поворота по формуле
может быть определена угловая скорость поворота по формуле
 .
.
Горизонтальный прямолинейный полет.
В этом случае крен летательного аппарата, который обуславливается динамическими ошибками при работе автопилота или ручного управления, всегда будет удовлетворять условию  , и при правильном задании
, и при правильном задании  , значение которого достаточно взять в диапазоне
, значение которого достаточно взять в диапазоне  , максимальная кардановая погрешность, вычисленная по формуле (1), будет меньше
, максимальная кардановая погрешность, вычисленная по формуле (1), будет меньше  . В действительности амплитуда колебаний летательного аппарата по крену значительно меньше
. В действительности амплитуда колебаний летательного аппарата по крену значительно меньше  и кардановая погрешность будет значительно меньше
и кардановая погрешность будет значительно меньше  . Поэтому судить об угле поворота в горизонтальной плоскости вокруг оси местной вертикали
. Поэтому судить об угле поворота в горизонтальной плоскости вокруг оси местной вертикали  достаточно использовать информацию о повороте вокруг нормальной оси летательного аппарата
достаточно использовать информацию о повороте вокруг нормальной оси летательного аппарата  . Т.е. в этом случае в соответствии с формулой (2)
. Т.е. в этом случае в соответствии с формулой (2) 
Горизонтальный полет с разворотом на произвольный угол.
В этом случае разворот происходит с углом крена, значительно большим, чем допустимый угол крена  При этом максимальное значение кардановой погрешности может достигать более
При этом максимальное значение кардановой погрешности может достигать более  . Для ее исключения в соответствии с предлагаемым способом необходимо формировать приращение угла поворота летательного аппарата в горизонтальной плоскости с использованием значений угловых скоростей относительно нормальной и поперечной осей с учетом угла крена
. Для ее исключения в соответствии с предлагаемым способом необходимо формировать приращение угла поворота летательного аппарата в горизонтальной плоскости с использованием значений угловых скоростей относительно нормальной и поперечной осей с учетом угла крена
 ,
,
что указано во второй части формулы (2), добавив приращение этого угла к значению курсового угла, которое было в момент начала поворота  .
.
При этом при левом повороте  а при правом повороте
а при правом повороте 
Так как разворот происходит непродолжительное время, обычно десятки секунд, то за счет операции интегрирования накопится незначительная погрешность, которая будет меньше кардановой погрешности, что говорит об эффективности предлагаемого способа.
Таким образом, способ измерения угла поворота летательного аппарата в горизонтальной плоскости формируется в классе систем с переменной структурой, в которой индикатором изменения структуры является допустимый угол крена  . При этом для прямолинейного горизонтального полета, когда
. При этом для прямолинейного горизонтального полета, когда  , угол поворота (угол отклонения от заданного направления) определяется как сигнал системного датчика курса гирополукомпаса
, угол поворота (угол отклонения от заданного направления) определяется как сигнал системного датчика курса гирополукомпаса
а при развороте, когда  , угол поворота определяется как сигнал системного датчика курса гирополукомпаса на момент входа в разворот, просуммированный с приращением угла, вычисленного по измеренным угловым скоростям относительно нормальной и поперечной осей
, угол поворота определяется как сигнал системного датчика курса гирополукомпаса на момент входа в разворот, просуммированный с приращением угла, вычисленного по измеренным угловым скоростям относительно нормальной и поперечной осей
Работоспособность способа была апробирована имитационным моделированием, где модель движения летательного аппарата была задана кинематически: прямолинейный полет с колебаниями по углу крена и курса; разворот по курсу на  с заданным углом крена
с заданным углом крена  и угловой скоростью поворота
и угловой скоростью поворота  ; и далее прямолинейный полет. Модели датчиков угловых скоростей были представлены с учетом их динамики, подобно ДУС-И1С. Модель гирополукомпаса была представлена прецессионной моделью с дрейфом вокруг оси наружной рамы равным
; и далее прямолинейный полет. Модели датчиков угловых скоростей были представлены с учетом их динамики, подобно ДУС-И1С. Модель гирополукомпаса была представлена прецессионной моделью с дрейфом вокруг оси наружной рамы равным  и выключателем коррекции в цепи горизонтальной коррекции. Результаты по погрешностям сопоставимы с работой способа в прототипе, что подтверждает работоспособность предлагаемого технического решения.
и выключателем коррекции в цепи горизонтальной коррекции. Результаты по погрешностям сопоставимы с работой способа в прототипе, что подтверждает работоспособность предлагаемого технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения угла поворота летательного аппарата в горизонтальной плоскости | 2023 |
|
RU2805424C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| СПОСОБ И УСТРОЙСТВО ПОСТРОЕНИЯ НЕВОЗМУЩАЕМОЙ БЕЗГИРОСКОПНОЙ ВЕРТИКАЛИ | 2002 |
|
RU2258907C2 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2374609C2 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
Изобретение относится к способу измерения угла поворота летательного аппарата в горизонтальной плоскости. Для измерения угла поворота в горизонтальной плоскости измеряют угол крена летательного аппарата, угол поворота вокруг его нормальной оси, угловые скорости по нормальной и поперечной осям. Формируют угол поворота в горизонтальной плоскости в соответствии с определенной математической формулой. Обеспечивается повышение надежности и точности измерения за счет компенсации кардановой погрешности. 1 ил.
Способ измерения угла поворота летательного аппарата в горизонтальной плоскости, включающий измерение угла крена и угла поворота относительно его нормальной оси, отличающийся тем, что дополнительно измеряют угловые скорости по нормальной и поперечной осям летательного аппарата, а его угол поворота в горизонтальной плоскости формируют в соответствии с формулой
где  текущий угол поворота, измеряемый относительно нормальной оси летательного аппарата;
текущий угол поворота, измеряемый относительно нормальной оси летательного аппарата;  угол поворота, измеряемый относительно нормальной оси на момент выполнения условия
угол поворота, измеряемый относительно нормальной оси на момент выполнения условия  ;
;  действительный и допустимый углы крена;
действительный и допустимый углы крена;  угловая скорость поворота вокруг местной вертикали;
угловая скорость поворота вокруг местной вертикали;  угловые скорости, направленные по нормальной и по поперечной осям летательного аппарата соответственно.
угловые скорости, направленные по нормальной и по поперечной осям летательного аппарата соответственно.
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| Гирокомпас | 1991 |
|
RU2000542C1 |
| US 4375726 A1, 08.03.1983 | |||
| JP 11263232 A, 28.09.1999 | |||
| СПОСОБ РЕСТАВРАЦИИ ЭЛЕКТРОВАКУУМНЫХ СВЧ-ПРИБОРОВ БОЛЬШОЙ МОЩНОСТИ | 2003 |
|
RU2244979C1 |
