Изобретение относится к измерительной технике и предназначено для измерения моментной неуравновешенности малогабаритных тел вращения с нематериализованной осью вращения и тел, не имеющих опорных поверхностей крепления.
Одним из способов измерения неуравновешенности тел вращения является способ измерения моментной неуравновешенности по авторскому свидетельству №302637 (МПК4 G 01 М 1/16, БИ №15 28.04.1971), при котором тело устанавливают в карданном подвесе таким образом, что геометрические оси тела совпадают с осями подвеса, вращают подвес относительно вертикальной оси, одновременно поворачивая тело вокруг его продольной оси, и определяют максимальное отклонение тела от горизонтального положения, по величине которого судят о моментной неуравновешенности. Данный способ предназначен для измерения неуравновешенности тел преимущественно нежесткой конструкции. Недостатком рассмотренной схемы является применение подшипников в качестве элементов подвеса. Наличие момента сил сухого трения в подшипниках приводит к появлению зоны нечувствительности и ограничивает точность измерения. Вращение тела относительно двух осей одновременно также является недостатком рассмотренной схемы, т.к. усложняет конструкцию вследствие необходимости применения дополнительного привода с малой скоростью вращения.
Прототипом предлагаемого изобретения является способ измерения моментной неуравновешенности (патент РФ №2147732 МПК5 G 01 М 1/16, Б.И. №11, 2000 г.), в котором тело устанавливают в трехстепенном карданном подвесе с горизонтальными осями подвеса, содержащем обойму и наружную рамку, таким образом, что оси подвеса совпадают со строительными осями тела, вращают подвес относительно вертикальной оси и определяют максимальное отклонение тела от первоначального положения, по величине которого определяют моментную неуравновешенность тела вращения, тело устанавливают в обойме таким образом, что продольная ось тела совпадает с вертикальной осью подвеса, а строительные оси комплекта обойма-тело совпадают со строительными осями тела, при этом обойма с телом и наружная рамка карданного подвеса соединены между собой при помощи торсионов и установлены в корпусе посредством торсионов. Недостатком данного способа является то, что измерение неуравновешенности тела происходит в установившемся режиме после достижения стабильной скорости вращения подвеса. Для этого требуется сравнительно большой промежуток времени, следовательно, время, затрачиваемое на измерение неуравновешенности одного тела, будет велико, что не приемлемо при измерении неуравновешенности большого количества тел вращения, при работе устройства в автоматическом режиме. При использовании данного способа чувствительность устройства к неуравновешенности зависит от стабильности скорости вращения.
При измерении моментной неуравновешенности малогабаритных тел вращения в автоматическом режиме требуется высокая чувствительность устройства к неуравновешенности тела и малое время, затрачиваемое на измерение моментной неуравновешенности одного тела.
Задачей настоящего изобретения является сокращение времени измерения, увеличение чувствительности и уменьшение влияния нестабильности скорости вращения обоймы с телом при измерении моментной неуравновешенности тела за счет использования работы устройства в режиме выбега обоймы с телом и производства измерений в момент резонанса.
Решение поставленной задачи достигается тем, что в способе определения моментной неуравновешенности тел вращения, при котором обойму с размещенном в ней телом устанавливают в подвесе, выполненном в виде рамки, закрепленной в корпусе посредством торсионов, таким образом, что строительные оси комплекта тело-обойма-рамка совпадают с осями подвеса, вращают обойму с телом вокруг продольной оси тела и определяют максимальное отклонение обоймы с телом от первоначального положения, по величине которого судят о неуравновешенности тела вращения. Обойму с телом устанавливают в рамке посредством опор вращения, обойму с телом вращают с переменной скоростью по экспоненциальному закону, величину угла, характеризующего моментную неуравновешенность тела вращения, определяют по следующей зависимости:
где С, А - осевой и экваториальный моменты инерции обоймы с телом, кг·м2; J - экваториальный момент инерции комплекта тело-обойма-рамка, кг·м2; с - угловая жесткость торсионов, H·м/рад; d - коэффициент демпфирадрования угловых колебаний комплекта тело-обойма-рамка, Н·м·с; βm - максимальная величина амплитуды вынужденных колебаний комплекта тело-обойма-рамка.
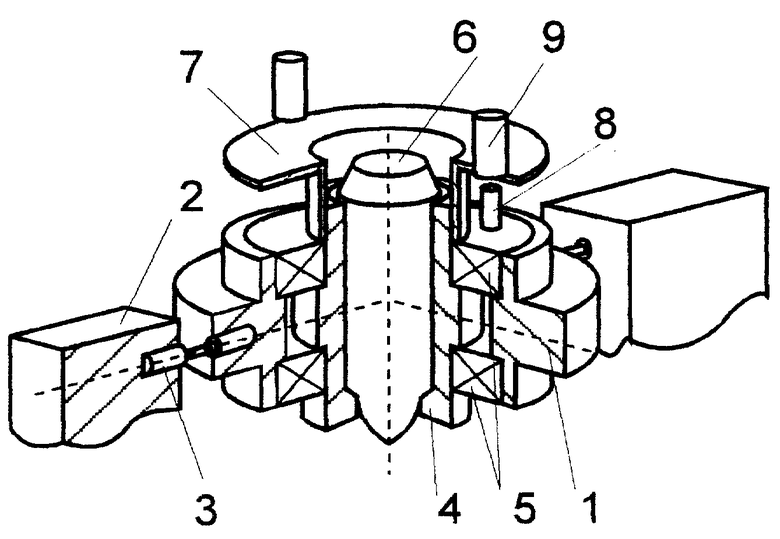
На чертеже - изображена схема устройства, реализующего заявленный способ.
Устройство состоит из рамки 1, связанной с корпусом 2 с помощью торсионов 3, обоймы 4, установленной в рамке 1 на подшипниках 5. В обойме жестко закреплено тело вращения 6, моментную неуравновешенность которого нужно измерить. На обойме 4 жестко закреплена шторка 7, перекрывающая световой поток от светодиода 8 к фотодиоду 9, установленныму на корпусе устройства. С помощью элементов 8, 9, получают сигнал, пропорциональный угловому отклонению βm обоймы с телом от первоначального положения.
Способ определения моментной неуравновешенности тел вращения заключается в следующем: тело вращения 6, моментную неуравновешенность которого необходимо измерить, устанавливают в обойме 4 таким образом, что центр масс комплекта, включающего в себя рамку 1, обойму 4 и тело 6, располагается на пересечении оси вращения обоймы с телом с осью торсионов 3. Затем обойме 4 с телом вращения 6 придают начальную скорость вращения  . (Привод на чертеже не показан. Это может быть в частности, газовый привод). В режиме свободного выбега вращающейся обоймы 4 с телом вращения 6, происходящим по закону, близкому к экспоненциальному
. (Привод на чертеже не показан. Это может быть в частности, газовый привод). В режиме свободного выбега вращающейся обоймы 4 с телом вращения 6, происходящим по закону, близкому к экспоненциальному  , где k - коэффициент затухания оборотов обоймы с телом; t - время, наличие моментной неуравновешенности тела вызывает вынужденные колебания обоймы с телом вокруг оси торсионов. В момент достижения некоторой скорости вращения
, где k - коэффициент затухания оборотов обоймы с телом; t - время, наличие моментной неуравновешенности тела вызывает вынужденные колебания обоймы с телом вокруг оси торсионов. В момент достижения некоторой скорости вращения  амплитуда угловых колебаний комплекта тело-обойма-рамка достигает максимального значения βm. Величину скорости вращения обоймы с телом
амплитуда угловых колебаний комплекта тело-обойма-рамка достигает максимального значения βm. Величину скорости вращения обоймы с телом  , соответствующую максимальному угловому отклонению комплекта тело-обойма-рамка, можно найти по формуле:
, соответствующую максимальному угловому отклонению комплекта тело-обойма-рамка, можно найти по формуле:
где ω0 - круговая частота собственных незатухающих колебаний комплекта тело-обойма-рамка; ξ - относительный коэффициент демпфирования угловых колебаний комплекта тело-обойма-рамка. При этом величина начальной скорости вращения должна выбираться из условия  .
.
Электрический сигнал, пропорциональный угловому отклонению комплекта тело-обойма-рамка, снимают с датчиков информации, расположенных на корпусе устройства.
Изобретение относится к измерительной технике. Сущность: обойму с размещенным в ней телом устанавливают в подвесе, выполненном в виде рамки, закрепленной в корпусе посредством торсионов, таким образом, что строительные оси комплекта тело-обойма-рамка совпадают с осями подвеса. Обойму с телом вращают вокруг продольной оси тела и определяют максимальное отклонение обоймы с телом от первоначального положения, по величине которого судят о неуравновешенности тела вращения. Обойму с телом устанавливают в рамке посредством опор вращения, обойму с телом вращают с переменной скоростью по экспоненциальному закону, а величину угла ε, характеризующего моментную неуравновешенность тела, определяют при помощи зависимости. Технический результат - упрощение проведения измерений. 1 ил.
Способ определения моментной неуравновешенности тел вращения, при котором обойму с размещенным в ней телом устанавливают в подвесе, выполненном в виде рамки, закрепленной в корпусе посредством торсионов таким образом, что строительные оси комплекта тело-обойма-рамка совпадают с осями подвеса, обойму с телом вращают вокруг продольной оси тела и определяют максимальное отклонение обоймы с телом от первоначального положения, по величине которого судят о неуравновешенности тела вращения, отличающийся тем, что обойму с телом устанавливают в рамке посредством опор вращения, обойму с телом вращают с переменной скоростью по экспоненциальному закону, а величину угла ε, характеризующего моментную неуравновешенность тела, определяют по следующей зависимости:
где С, А - осевой и экваториальный моменты инерции обоймы с телом, кг·м2;
J - экваториальный момент инерции комплекта тело-обойма-рамка, кг·м2;
с - угловая жесткость торсионов, Н·м/рад;
d - коэффициент демпфирования угловых колебаний комплекта тело-обойма-рамка, Н·м·с;
βm - максимальное значение амплитуды колебаний комплекта тело-обойма-рамка, рад.
| RU 2001126904 A 20.08.2003 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТНОЙ НЕУРАВНОВЕШЕННОСТИ ТЕЛ ВРАЩЕНИЯ | 1998 |
|
RU2147732C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОЙ НЕУРАВНОВЕШЕННОСТИ | 0 |
|
SU302637A1 |
| Способ балансировки деталей вращения и устройство для его осуществления | 1984 |
|
SU1247702A1 |
| US 6062078 A 16.05.2000. | |||

