Предлагаемое изобретение относится к измерительной технике и предназначено для измерения моментной неуравновешенности тел вращения с нематериализованной осью вращения и тел, не имеющих четких базовых поверхностей крепления, с целью их сортировки в зависимости от величины неуравновешенности.
Одним из устройств, с помощью которых измеряют неуравновешенность тела, является аппаратура для определения разбаланса вращающегося элемента по патенту США N 5058429 от 22.10.91. Аппаратура содержит: устройство для установки вращаемого элемента в положение, в котором он может вращаться в течение выполняемых измерений и совершать вдоль направляющих вынужденные колебательные движения, которые измеряют с помощью преобразователя, формирующего на выходе сигнал, указывающий величину усилия в направлении измеряемых колебаний, создаваемого вращающимся элементом при его вращении в процессе выполняемых измерений. Для вращения элемента используется приводной ремень, имеющий часть, которая движется в направлении, практически перпендикулярном направлению измеряемых колебаний. Вращаемый элемент расположен в процессе проводимых измерений так что он касается приводного ремня. При этом направление измеряемых колебаний, направление вдоль которого эти колебания происходят, наклонено под острым углом относительно плоскости горизонта, а направление приводного усилия смещено относительно вертикали таким образом, что вращающийся элемент может беспрепятственно перемещаться в вертикальном направлении приводным ремнем к устройству для установки вращающегося элемента или от этого устройства.
Прототипом предлагаемого изобретения является способ измерения моментной неуравновешенности по авторскому свидетельству N302637 (МПК G 01 M 1/16, БИ N15 28.04.1971) при котором тело устанавливают в карданном подвесе таким образом, что геометрические оси тела совпадают с осями подвеса, вращают подвес относительно вертикальной оси, одновременно поворачивая тело вокруг его продольной оси и измеряют максимальное отклонение тела от горизонтального положения, по величине которого судят о моментной неуравновешенности. Данный способ предназначен для измерения неуравновешенности тел преимущественно нежесткой конструкции. Недостатком рассмотренной схемы является применение подшипников в качестве элементов подвеса. Наличие момента сил сухого трения в подшипниках приводит к появлению зоны нечувствительности и ограничивает точность измерения. Вращение тела относительно двух осей одновременно также является недостатком рассмотренной схемы, т. к усложняет конструкцию вследствие необходимости применения дополнительного привода с малой скоростью вращения.
При определении неуравновешенности малогабаритных тел вращения, не имеющих базовых поверхностей крепления, требуется высокая чувствительность к измеряемой неуравновешенности.
Задачей настоящего изобретения является увеличение чувствительности к измеряемой неуравновешенности тел, не имеющих базовых поверхностей крепления и упрощение процесса измерения неуравновешенности.
Поставленная цель достигается применением карданного подвеса с упругими опорами, выбором параметров и скорости вращения карданного подвеса, при которых обеспечивается наибольшая чувствительность устройства к моментной неуравновешенности тела. Для этого в способе измерения моментной неуравновешенности тел вращения тело устанавливают в карданном подвесе, с горизонтальными осями подвеса, таким образом, что оси подвеса совпадают со строительными осями тела, вращают подвес относительно вертикальной оси, измеряют максимальное отклонение тела от первоначального положения, по величине которого судят о неуравновешенности тела. Тело устанавливают во внутренней рамке карданова подвеса, выполненной в виде обоймы таким образом, что его продольная ось совпадает с вертикальной осью подвеса, и строительные оси комплекта обойма-тело совпадают со строительными осями тела.
Моменты инерции элементов подвеса определяются конструктивно, параметры торсионов - на основании расчета на предельное напряжение при кручении для заданного максимального крутящего момента. Скорость вращения подвеса выбирается в соответствии с соотношением:
где: Ω - скорость вращения подвеса;
k - жесткость торсионов;
Λмакс - максимальное значение угла поворота тела от первоначального положения при сохранении линейности характеристики деформации торсиона для заданного максимального крутящего момента;
B1, C1 - экваториальный и осевой моменты инерции обоймы с пулей относительно строительных осей тела;
ε - величина, характеризующая моментную неуравновешенность тела;
На чертеже изображена схема устройства, реализующего заявленный способ:
Исследуемое тело 1 фиксируют в обойме 2, которая при помощи торсионов 3 установлена в наружной рамке 4. Наружная рамка 4, вместе с обоймой 2 и телом 1, при помощи торсионов 5 установлена в корпусе 6, который на подшипниках 7 вращается относительно вертикальной оси Z. На основании устройства установлены датчики 8, 9, фиксирующие отклонения тела от вертикального положения.
Тело 1, величину моментной неуравновешенности которого необходимо измерить, устанавливают в обойму 2 таким образом, чтобы оси подвеса X, Y совпадали со строительными осями комплекта обойма- тело. После этого корпус 6, наружную рамку 4 и обойму 2, вместе с исследуемым телом 1, приводят во вращение вокруг вертикальной оси Z с постоянной угловой скоростью.
При наличии моментной неуравновешенности тело 1 вместе с обоймой 2 отклоняется от первоначального положения вокруг осей подвеса X, Y.
Электрический сигнал, пропорциональный моментной неуравновешенности, снимают с датчиков информации, которые измеряют угол отклонения тела от первоначального положения. Величина сигнала с датчика информации пропорциональна моментной неуравновешенности тела. Съем информации происходит в неподвижной системе координат, т.е. по отношению к корпусу устройства.
Например, если значения моментов инерции элементов подвеса B1= 0,14193•10-4 кг•м2, C1= 0,5935•10-6 кг•м2, значение моментной неуравновешенности ε = 0,006 рад, максимальное значение угла поворота тела от первоначального положения при сохранении линейности характеристики деформации торсиона для заданного максимального крутящего момента Λмакс= 9,136•10-3 рад, значение жесткости торсиона  тo в соответствии с соотношением (1), значение угловой скорости подвеса
тo в соответствии с соотношением (1), значение угловой скорости подвеса  и
и
Способ предназначен для определения моментной неуравновешенности тел вращения с нематериализованной осью вращения и тел, не имеющих четких базовых поверхностей крепления. При реализации способа тело устанавливают в карданном подвесе с горизонтальными осями подвеса так, что оси подвеса совпадают со строительными осями тела. Подвес вращают относительно вертикальной оси и измеряют максимальное отклонение тела от первоначального положения, по величине которого судят о моментной неуравновешенности тела. Тело устанавливают во внутренней рамке карданного подвеса, выполненного в виде обоймы так, что продольная ось тела совпадает с вертикальной осью подвеса, и строительные оси комплекта обойма-тело совпадают со строительными осями тела. Обойма с телом и наружная рамка карданного подвеса соединены между собой при помощи торсионов и установлены в корпусе посредством торсионов. Технический результат - увеличение чувствительности к измеряемой неуравновешенности тел, не имеющих базовых поверхностей крепления, и упрощение процесса измерения неуравновешенности. 1 з.п. ф-лы, 1 ил.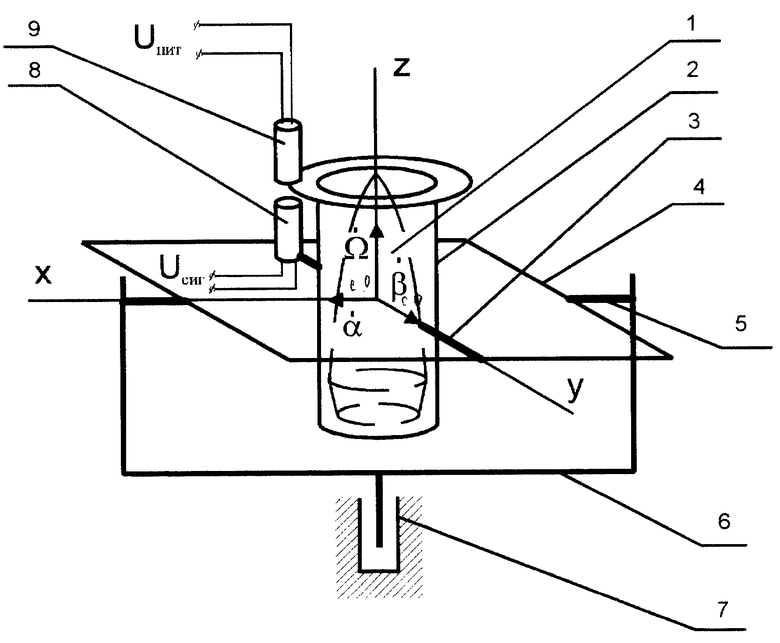
где Ω - скорость вращения карданного подвеса;
k - жесткость торсионов;
λмакс - максимальное значение угла поворота тела от первоначального положения при сохранении линейности характеристики деформации торсиона для заданного максимального крутящего момента;
B1, C1 - экваториальный и осевой моменты инерции обоймы с телом относительно строительных осей тела;
ε - величина, характеризующая моментную неуравновешенность тела.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОЙ НЕУРАВНОВЕШЕННОСТИ | 0 |
|
SU302637A1 |
| Способ определения дисбаланса тела | 1982 |
|
SU1211614A1 |
| US 3720110 A, 13.03.1973 | |||
| US 4467639 A, 28.08.1984. | |||
