Изобретение относится к области изме- ри|ельной техники, в частности к гироскопическим приборам, и может быть использовано для проведения балансировочных и проверочных работ свободных ги- ройкопов в кардановом подвесе.
Изобретение направлено на устранение погрешности определения и компенсации статического небаланса из-за влияния на результаты уходов по внутренней рамке динамической неуравновешенности наружной рамки.
Сущность изобретения состоит в том, что при осуществлении способа балансировки трехстепенного гироскопа в кардановом подвесе, основанном на измерении уходов рамок при колебании гироскопа относительно осей этих рамок и перемещений центра масс рамок, изменение положения центра масс наружной рамки производят с учетом величины ухода внутренней рамки
при колебаниях гироскопа с вертикальным положением оси наружной рамки.
При использовании двухосной качающейся установки отклонение кинетического момента относительно оси наружной рамки не вызывает дополнительных уходов гироскопа.
Первоначальное измерение ухода гироскопа относительно оси внутренней рамки в положении гироскопа, когда ось его наружной рамки вертикальна, и учет величины ухода при изменении положения центра масс рамок гироскопа позволяют устранить погрешность определения и компенсации статического небаланса из-за влияния этого ухода.
Поскольку отличительные признаки достаточны во всех случаях для достижения технического результата, эти признаки являются существенными.
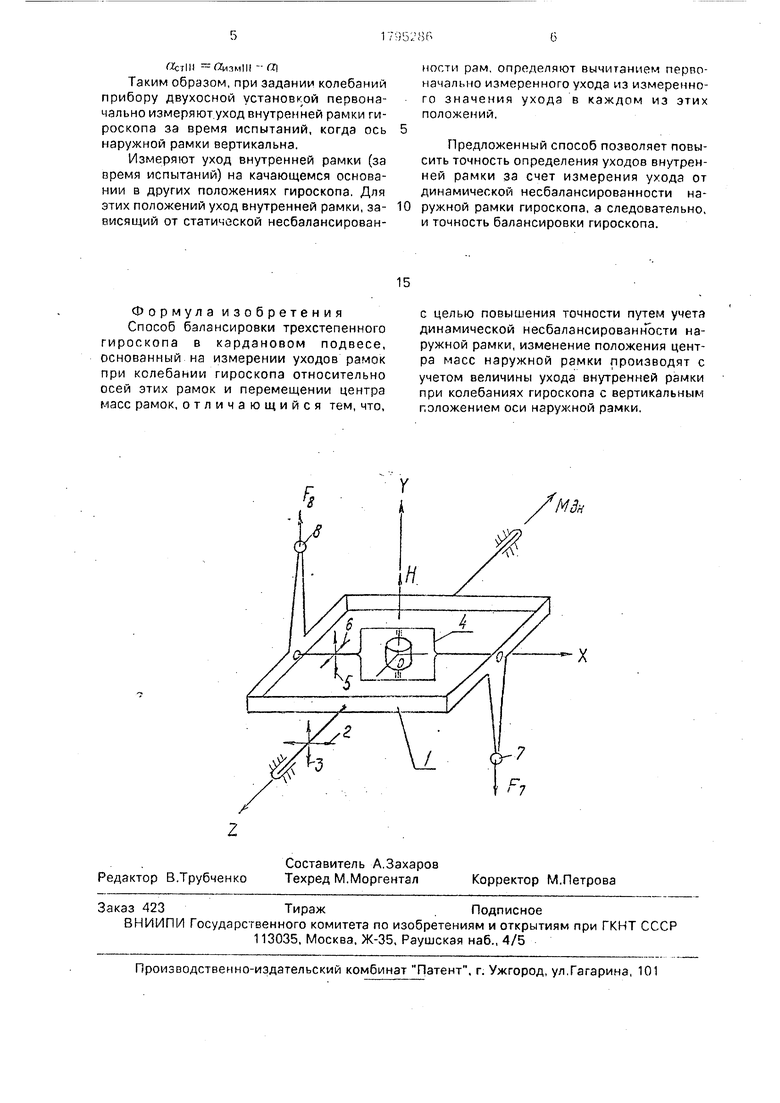
На чертеже изображен балансируемый трехстепенный гироскоп.
XI О
ел
N 00 ON
На наружной рамке 1 гироскопа имеются балансировочные грузы,направления перемещения которых показано стрелками 2, 3.
На внутренней рамке 4 расположены балансировочные грузы, направления перемещения которых обозначены стрелками 5, 6.
Пусть имеется динамическая несбалан
сированность наружной рамки гироскопа,
характеризуемая ненулевым центробежным моментом инерции сечения Ху в плоскости YOX, проходящей через ось ОХ внутренней рамки 4 перпендикулярно оси OZ наружной рамки 1. Эта несбалансиро- ванность может быть показана сосредоточенными массами 7 и 8 (т и тв), расположенными в плоскости XOY на наружной рамке 1, При этом центробежный момент инерции ху равен:.
Ху rri7X7Y7 + msXsYs,
где X, Y - координаты соответствующих сосредоточенных масс.
При закреплении прибора на платформе двухосной качающейся установки обес- печивают постоянное совпадение осей наружной и внутренней рамок с соответствующими осями колебаний установки, а изменение положения гироскопа осуществляют вместе с системой задания колебаний (т.е. вместе с этой установкой),
Во время функционирования двухосной установки колебаний при включенном и раз- арретированном приборе,, находящемся в каком-либо пространственном положении, внутренняя рамка 4 гироскопа остается практически неподвижной в пространстве, а наружная 1 - качается вокруг оси ОХ внутренней рамки с постоянными амплитудой рм и частотой Тк, задаваемыми этой установ- кой. Обычной применяют установку, формирующую синусоидальные колебания, поэтому:
закон изменения угла качаний наруж- .ной рамки 1 относительно оси ОХ внутрен- ней рамки 4:
р (fa sin со t, где Шк 2 л fk - угловая частота колебаний
t - время;.
угловая скорость колебаний наружной рамки 1 относительно оси ОХ:
Q - -jj рм cos dk г.
Центробежные силы, возникающие при колебаниях сосредоточенных масс 7,8:
fip Y7;
Fs me Ј YsВ результате на наружную рамку 1 вокруг ее оси OZ действует момент от динами
ческой несбалансированности наружной рамки 1:
Мдн F7 X + РвХа & ( Y +
+ msXeYs) С Ixy Ixy У Д COS UAc t lxy (1 + COS ) .
Среднее значение момента
Ixy Q рм
2
Этот средний момент вызовет дрейф гироскопа относительно оси внутренней рамки 1:
М
АН ср
«
М
|дн ср
gg-ixy
(
Н COS (рм COS Oh. t)2 Н
где Н - кинетический момент гироскопа.
(так как (рм-мзп((рм 3...60), то можно считать созОрм cos ГАс t 1).
Этот уход гироскопа относительно оси внутренней рамки будет присутствовать при качаниях независимо от пространственного положения гироскопа.
В первоначальном положении гироскопа, когда (до задания колебаний) ось OZ наружной рамки 1 вертикальна, этот уход нельзя скомпенсировать грузами 2, 3, 5, 6 (применяемыми для статической балансировки), и р езультзт измерения ухода внутренней рамки 4 в этом положении как раз равен уходу от динамической несбалансированности наружной рамки 1 (с небольшой погрешностью, определяемой несимметрией и нестабильностью сил сухого трения). Поэтому этот результат измерения с учетом знака (а) следует зафиксировать.
В другом положении гироскопа, когда оси наружной рамки 1 (OZ) и внутренней рамки 4 (ОХ) - горизонтальны (как на фиг. 1), результат измерения ухода внутренней рамки 4 (Оизм) будет содержать уход от статической несбалансированности (OCTII), устраняемой перемещением груза 2, а также уход от динамической несбалансированности наружной рамки 1 (равный ai).
Аналогично в третьем положении, когда ось OZ наружной рамки 1 горизонтальны, а ось ОХ внутренней рамки 4 - вертикальна, результатизмерени.я ухода внутренней рамки (Оизмш) будет содержать уход от статической несбалансированности (Остш), устраняемой перемещением грузов 3, 5, а также уход от динамической несбалансированности наружной рамки 1 (равный а).
. Следовательно, уход внутренней рамки 4, зависящий от статической несбалансированности, для второго и третьего положения определится:
ОизмП ( А ,
«CTlll ЙИЗМ|И CX
Таким образом, при задании колебаний прибору двухосной установкой первоначально измеряют.уход внутренней рамки гироскопа за время испытаний, когда ось наружной рамки вертикальна.
Измеряют уход внутренней рамки (за время испытаний) на качающемся основании в других положениях гироскопа. Для этих положений уход внутренней рамки, зависящий от статической несбалансирован0
мости рам, определяют вычитанием первоначально измеренного ухода из измеренного значения ухода в каждом из этих положений.
Предложенный способ позволяет повысить точность определения уходов внутренней рамки за счет измерения ухода от динамической несбалансированности наружной рамки гироскопа, а следовательно, и точность балансировки гироскопа.

Изобретение относится к точному машиностроению, а именно к балансировке трехстепенных гироскопов. Целью изобретения является повышение точности балансировки гироскопа путем учета динамической несбалансированности наружной рамки. Это достигается тем, что сначала измеряют уход внутренней рамки при вертикальном положении оси наружной рамки. Значение этого ухода учитывают при балансировке наружной рамки. Балансировка может проводиться дополнительными грузами, размещенными на наружной рамке в плоскости XOY. 1 ил.
Формула изобретения Способ балансировки трехстепенного гироскопа в кардановом подвесе, основанный на измерении уходов рамок при колебании гироскопа относительно осей этих рамок и перемещении центра масс рамок, отличающийся тем, что,
с целью повышения точности путем учета динамической несбалансированности наружной рамки, изменение положения центра масс наружной рамки производят с учетом величины ухода внутренней рамки при колебаниях гироскопа с вертикальным положением оси наружной рамки.
| Асе Б | |||
| А | |||
| и др | |||
| Сборка, регулировка и испытание авиационных приборов | |||
| М.: Машиностроение, 1969, с | |||
| Катодное реле | 1921 |
|
SU250A1 |
