Пзобретение относится к области анало1-овой и вычис.тительной техники.
Пзвестно устройство для моделирования приводов, в котором выходной вал совершает движение иод действием момента, развиваемого приводом, и момента нагрузки, создаваемого ири ИОМОШ.И электромеханического или электрогндравлического нагрузочного стенда. Это устройство имеет следующие недостатки.
Исследуемый нривод и нагрузочный стенд нотребляют значительную мощность. Потребляемая мощность значительно возрастает по сравнению с мощностью, расходуемой в исследуемом нриводе, в случае необходимости воспроизведения быстроизменяющихся моментов нагрузки; нагрузочный стенд представляет собой сложное устройство, требующее, как правило, сиециального нроектирования и изготовления для каждого нового тина привода; нагрузочный стенд не обеспечивает восироизведення быстроизменяющихся, в частности импульсных, воздействий; экснеримеитальная часть работы сопровождается угнетающим щумом от вращающихся электрических маЩИН.
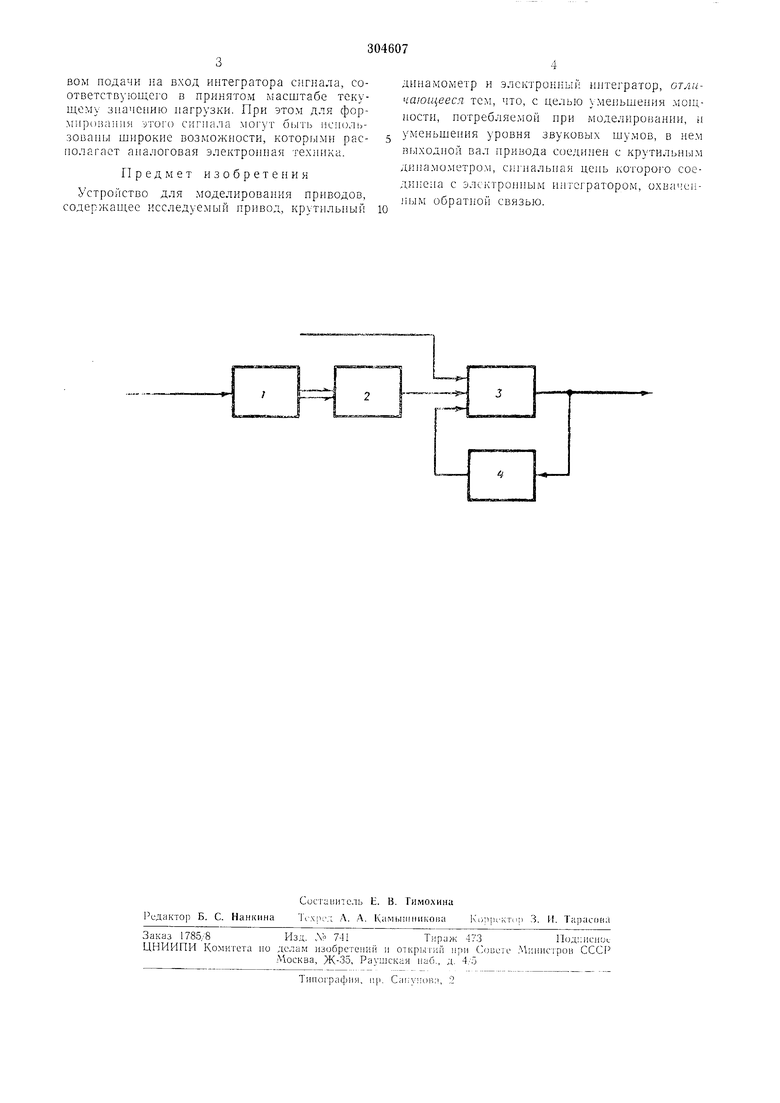
Предлагается устройство для моделирования приводов, позволяющее избежать или существенно уменьщить эти недостатки. Принцип деГютвия этого устройства, схематически показаппого на чертеже, состоит в том, что выходной вал привода / затормаживают носредством кинематического соединения его с крутильным динамометром 2, сигнальную цепь которого электрически соединяют с электронным интегратором 3, охваченным обратной связью 4, при которой функциональная зависимость между входной и выходной переменными интегратора соответствует в принятом масштабе зависимости текущего значения момента привода от текущего значения скорости его вала. Крутильный динамометр представляет собой обычио упругую пластину, перемещение которой под действием момента нривода регистрируется ири помощи электромеханического датчика перемещения. Крутильный динамометр выполняет здесь функцию линейного датчика текущего значения момента привода и частота его собственных колебаний должна быть но крайней мере на порядок выше частоты собственных колебаний исследуемого ирнвода. При помощи электронного интегратора, охваченного обратной связью, формируется механическая характеристика исследуемого привода, так что выходная координата интегратора в принятом масштабе соответствует скорости вращения выходного вала иривода. Посредством обратной связи чит зшается зависимость момента привода от его скорости: «вязкое трение, «ограничение и др.
BOM подачи на вход интегратора сигиала, соответствующего в принятом масштабе текущему значению нагрузки. При этом для формирования утого сигнала могут б1)ГГ1 1))Л1 зованы щирокие возможности, котор1 1ми располагает аналоговая электронная техника.
Предмет изобретения
Устройство для моделирования приводов, содержащее исследуемый привод, крутильный
динамометр и электронный интегратор, отличающееся тем, что, с целью у.меньщения MOHI,иости, потребляемой при моделировании, и уменьгиения уровня звуковых шумов, в нем выходной вал привода соединен с крутильны.м динамометро.м, сигнальная день KOTOpoiO соединена с электронным интегратором, охваченным обратноГ) связью.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для испытания приводов | 1975 |
|
SU533915A1 |
| Электромеханический привод с механической характеристикой, адаптивной к действию нагрузки | 2022 |
|
RU2783044C1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для моделирования привода | 1983 |
|
SU1138814A1 |
| УСТРОЙСТВО для МОДЕЛИРОВАНИЯ УПРАВЛЯЕМОГОРЕАКТОРА | 1969 |
|
SU252735A1 |
| СТЕНД ДЛЯ МОДЕЛИРОВАНИЯ ВОЗДЕЙСТВИЯ СОЛНЕЧНОЙ БАТАРЕИ С ПРИВОДОМ НА КОСМИЧЕСКИЙ АППАРАТ | 2003 |
|
RU2270793C2 |
| Стенд для испытания механических и бесступенчатых коробок передач легковых автомобилей | 2022 |
|
RU2801509C1 |
| Способ испытаний судовых движительных комплексов и стенд для его осуществления | 2023 |
|
RU2817909C1 |
| Стенд для испытаний объемных гидромеханических передач на неустановившихся режимах работы | 1989 |
|
SU1707303A1 |
| УСТРОЙСТВО АВТОМАТИЗАЦИИ ИСПЫТАНИЙ ДВИЖИТЕЛЕЙ АВТОНОМНЫХ ОБЪЕКТОВ | 2020 |
|
RU2739905C1 |
