Изобретение относится к области электротехники и может быть использовано в системах приводов летательных аппаратов, робототехники опорно-поворотных устройствах и в других системах управления движением, для которых энергомассовые показатели имеют актуальное значение.
Известны электромеханические приводы (ЭМП) одноканальные и многоканальные различного назначения, содержащие в каждом канале каскад усилителей, электродвигатель с датчиком тока и положения ротора, механический редуктор, а также датчики положения и скорости выходного вала.
В этих схемах все датчики указанных и других параметров используются в корректирующих обратных связях для достижения различных желаемых статических и динамических характеристик (Проектирование следящих систем. Под редакцией Л.В. Рабиновича, рис. 3.36, изд-во Машиностроение, М., 1969, Патент RU 2655723, Опубл. В Бюл. №16, 2018 г.).
Обратные связи по току или моменту вводят для корректировки упругостей электрических и механических передач (повышение жёсткости – крутизны моментных характеристик), а связи по скорости для повышения быстродействия и качества переходных процессов.
Однако перечисленные корректирующие обратные связи по указанным параметрам не использовались (в технической литературе не обнаружено) для корректировки потребляемой мощности источника электрической энергии в зависимости от действующей нагрузки, т.е. известные ЭМП не адаптивны по мощности к действию нагрузки.
Технической задачей и целью предлагаемого изобретения является улучшение энергомассовых показателей за счёт регулирования потребляемой мощности в зависимости от действия нагрузки, т.е. создание ЭМП обладающего свойством адаптивности по мощности к действию нагрузки.
Располагаемая мощность ЭМП характеризуется площадью предельной механической характеристики электродвигателя (ЭД), ограниченной значениями момента пуска  (где
(где  - пусковой момент ЭД; q – передаточное отношение механического редуктора) и скоростью холостого хода
- пусковой момент ЭД; q – передаточное отношение механического редуктора) и скоростью холостого хода  (где
(где  - скорость холостого хода ЭД) при максимальном значении сигнала управления
- скорость холостого хода ЭД) при максимальном значении сигнала управления  .
.
Условием преодоления ЭМП действия нагрузки, изменяющейся по некоторому закону (гармоническому, произвольному или др.), является расположение всех значений моментов нагрузки  и скоростей нагрузки
и скоростей нагрузки  внутри плоскости, ограниченной этой механической характеристикой.
внутри плоскости, ограниченной этой механической характеристикой.
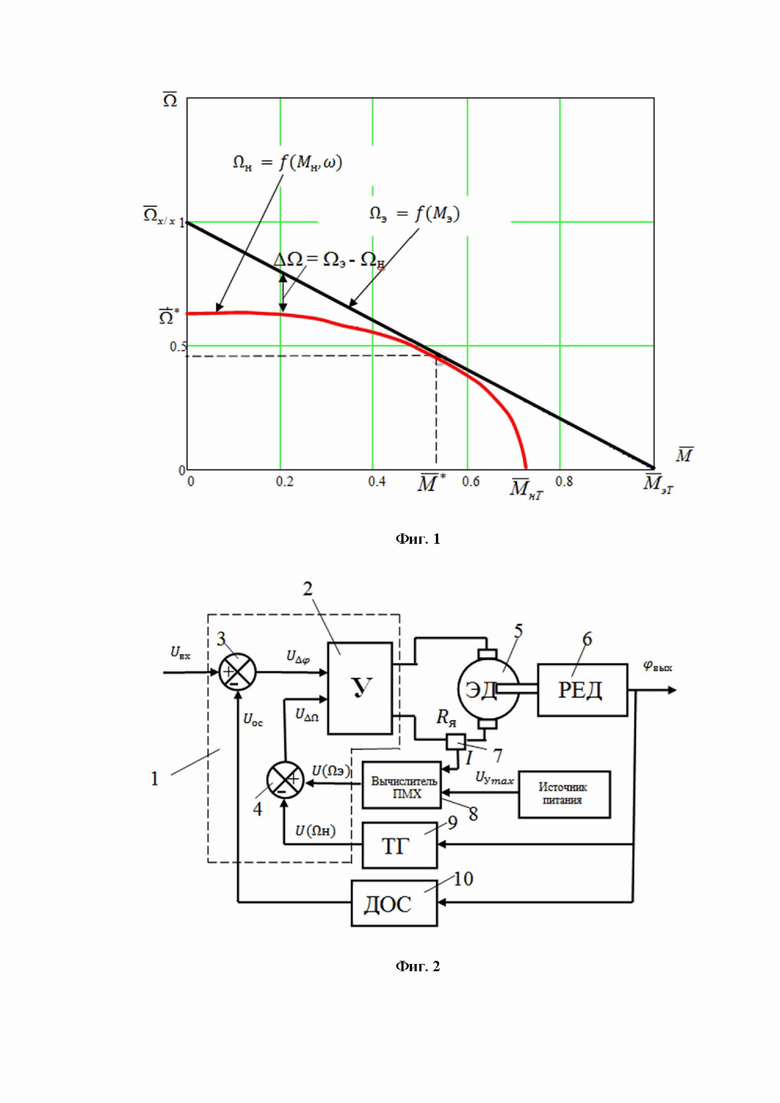
На фиг. 1 приведены графики механической характеристики ЭМП и нагрузочной характеристики при гармоническом сигнале управления – эллипсе нагрузки.
Как видно на фиг. 1 механическая характеристика контактирует с нагрузочной только в одной точке.
Эта точка свидетельствует о том, что располагаемая мощность ЭМП полностью тратится (без учёта потерь) и примерно равна требуемой мощности. В остальных точках плоскости при одинаковом моменте имеет место разность скоростей  .
.
Если формировать механическую характеристику так, чтобы при каждом значении  скорости были примерно равны, т.е. механическая характеристика контактировала бы с нагрузочной во всём диапазоне изменения скорости, то можно сократить (сэкономить) энергоресурс (ёмкость батареи, а следовательно, и массу) источника электрического питания.
скорости были примерно равны, т.е. механическая характеристика контактировала бы с нагрузочной во всём диапазоне изменения скорости, то можно сократить (сэкономить) энергоресурс (ёмкость батареи, а следовательно, и массу) источника электрического питания.
Известно, что механическая характеристика ЭМП, например, с ЭД постоянного тока описывается уравнением
 ,
,
где  - коэффициент противо-ЭДС;
- коэффициент противо-ЭДС;  - коэффициент момента;
- коэффициент момента;  - активное сопротивление обмотки якоря.
- активное сопротивление обмотки якоря.
Если учесть, что
 ,
,
где  - потребляемый ток ЭД, то
- потребляемый ток ЭД, то
 .
.
Скорость нагрузки можно получить с датчика скорости вала тахогенератора  или путём дифференцирования сигнала с датчика положения
или путём дифференцирования сигнала с датчика положения  выходного вала ЭМП.
выходного вала ЭМП.
В результате разность скоростей можно реализовать в виде:  .
.
Технический результат достигается тем, что в ЭМП, содержащим электронный усилитель, исполнительный электродвигатель с датчиком тока, а также датчики положения и скорости выходного звена привода, сформирована и введена обратная связь на вход электронного усилителя по разности напряжений, соответствующей разности скоростей между располагаемой предельной механической и требуемой нагрузочной характеристиками для фиксированного значения момента, при этом, требуемая скорость реализуется в виде сигнала с датчика скорости выходного вала привода, а располагаемая скорость реализуется по сигналу с датчика тока электродвигателя по зависимости
 ,
,
где  - максимальное напряжение сигнала управления; - коэффициент противо-ЭДС; - коэффициент момента; - активное сопротивление обмотки якоря.Сущность предлагаемого изобретения поясняется схемой и графиками.
- максимальное напряжение сигнала управления; - коэффициент противо-ЭДС; - коэффициент момента; - активное сопротивление обмотки якоря.Сущность предлагаемого изобретения поясняется схемой и графиками.
На фиг. 1 приведены графики неадаптивной механической характеристики и нагрузочной характеристики при гармоническом сигнале управления в относительных координатах:  - относительная координата текущего момента;
- относительная координата текущего момента;  - относительная координата текущей угловой скорости.
- относительная координата текущей угловой скорости.
На фиг. 2 приведена функциональная схема ЭМП адаптивного к нагрузке с предлагаемой обратной связью по разности скоростей.
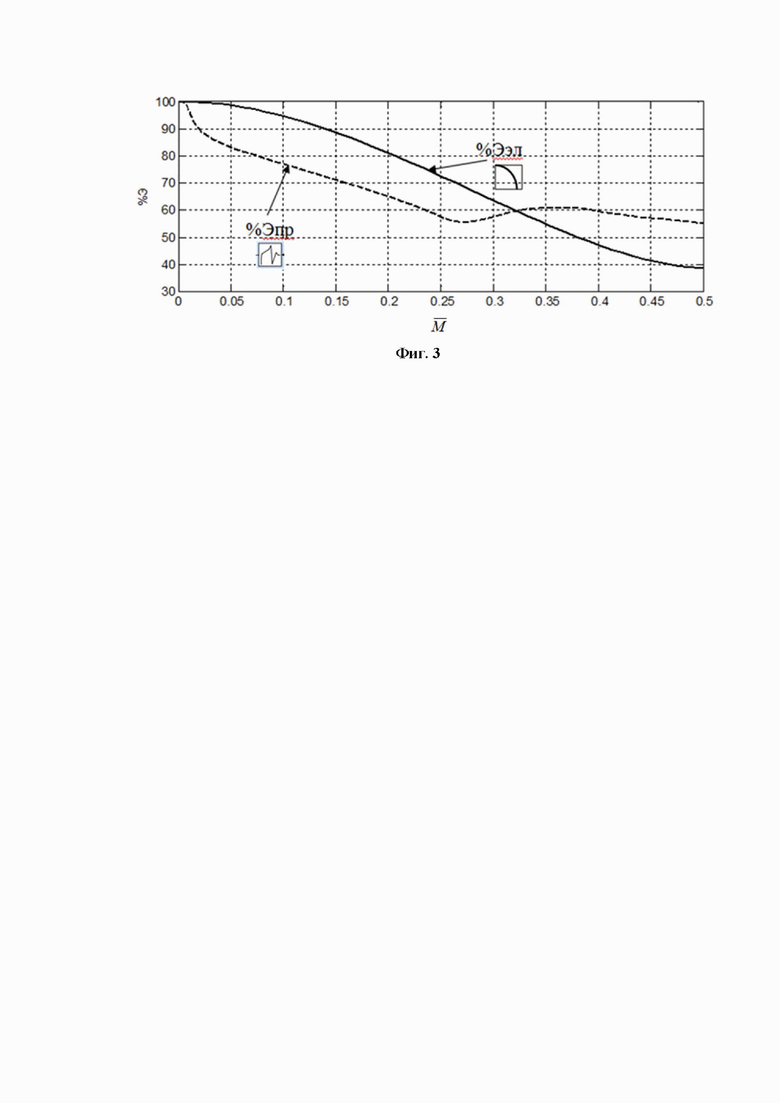
На фиг. 3 изображены графики экономической эффективности при гармоническом и произвольном сигналах управления.
Функциональная схема ЭМП содержит последовательно расположенные: электронный блок 1, в который входят усилительное 2 и суммирующие устройства 3 и 4; исполнительный электродвигатель 5; механический редуктор 6 и датчики обратных связей: по току 7, которым является активное сопротивление в цепи якоря ЭД 5, электрически подключённого к сумматору 4 через вычислитель 8; по скорости выходного вала – тахогенератор (ТГ) 9, обмотки которого подключены к сумматору 4; по положению выходного вала – датчик обратной связи (ДОС) 10, подключённого к сумматору 3 электронного блока 1.
В вычислитель 8 вводятся параметры исполнительного двигателя 5: коэффициент противо-ЭДС  , коэффициент момента
, коэффициент момента  и активное сопротивление
и активное сопротивление  и запрограммировано вычисление скорости в зависимости от тока
и запрограммировано вычисление скорости в зависимости от тока  .
.
ЭМП работает следующим образом. На вход электронного блока 1 подаётся сигнал  , например, в виде гармонического
, например, в виде гармонического  или сигнала произвольной формы. В результате вычитания в сумматоре 3 сигнал с датчика обратной связи
или сигнала произвольной формы. В результате вычитания в сумматоре 3 сигнал с датчика обратной связи  на вход усилителя 2 поступает сигнал управления
на вход усилителя 2 поступает сигнал управления  .
.
Для наглядности представления работы ЭМП примем, что усилитель работает по принципу широтно-импульсной модуляции (ШИМ), т.е. в усилителе формируется скважность импульсов пропорциональная сигналу управления. При отсутствии сигнала управления скважность γ = 0, при максимальном сигнале управления скважность γ = 1.
Амплитуда импульсов напряжения на выходе усилителя выбирается из условия, что скорость нагрузки и требуемая мощность, при фиксируемом моменте, равны без учёта потерь мощности, располагаемой ЭМП. Равенство скоростей и моментов свидетельствует о совпадении механической характеристики с нагрузочной. При любой скважности для каждой скорости располагаемая скорость превышает требуемую.
При наличии импульса напряжения на обмотке ЭД по ней течёт ток, и вычислитель в соответствии с величиной тока рассчитывает по формуле  допустимую скорость при располагаемом моменте. Сигнал с вычислителя 8 подаётся на сумматор и из него вычитается напряжение с датчика скорости выходного вала – тахогенератора 9. Сигнал по разности скоростей
допустимую скорость при располагаемом моменте. Сигнал с вычислителя 8 подаётся на сумматор и из него вычитается напряжение с датчика скорости выходного вала – тахогенератора 9. Сигнал по разности скоростей  поступает в усилитель и изменяет величину амплитуды импульса в соответствии (пропорционально) с этой разностью. В результате ЭМП с введённой обратной связью по разности скоростей потребляет энергию в соответствии с действием нагрузки, сокращая её расход. Или другими словами формирует механическую характеристику ЭМП адаптивную к действию нагрузки.
поступает в усилитель и изменяет величину амплитуды импульса в соответствии (пропорционально) с этой разностью. В результате ЭМП с введённой обратной связью по разности скоростей потребляет энергию в соответствии с действием нагрузки, сокращая её расход. Или другими словами формирует механическую характеристику ЭМП адаптивную к действию нагрузки.
Для оценки эффективности экономии энергии составлена математическая модель предлагаемого ЭМП и проведено моделирование его работы при гармоническом и произвольном законах управления. Результаты моделирования в виде графиков приведены на фиг. 3, где:
- - относительная координата текущего момента;
-  - относительная координата процента экономии электрической энергии;
- относительная координата процента экономии электрической энергии;
-  - площадь под кривой
- площадь под кривой  для предельной механической характеристики ЭМП;
для предельной механической характеристики ЭМП;
-  - площадь под кривой
- площадь под кривой  для адаптивной предельной механической характеристики ЭМП;
для адаптивной предельной механической характеристики ЭМП;
- площадь под кривой для предельной механической характеристики ЭМП;
-  - для эллипса нагрузки;
- для эллипса нагрузки;
-  - для произвольного закона нагрузки.
- для произвольного закона нагрузки.
Из приведённых графиков следует, что ЭМП с механической характеристикой адаптивной к действию нагрузки потребляет энергии на 15…38% меньше, чем с неадаптивной, в которой не используется обратная связь по разности скоростей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСТОЧНИК ВТОРИЧНОГО ЭЛЕКТРОПИТАНИЯ С КОМПЕНСАЦИЕЙ ИСКАЖЕНИЙ В ПИТАЮЩЕЙ СЕТИ | 2005 |
|
RU2292627C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ДВУХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ С ЭЛЕКТРИЧЕСКОЙ ОБРАТНОЙ СВЯЗЬЮ | 2007 |
|
RU2361119C2 |
| ТРЕХКАСКАДНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2007 |
|
RU2346187C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ДВУХКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361123C2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ С ОДНОКАСКАДНЫМ ЭЛЕКТРОГИДРАВЛИЧЕСКИМ УСИЛИТЕЛЕМ МОЩНОСТИ | 2007 |
|
RU2361122C2 |
| Стенд универсальный автоматизированный энергосберегающий | 2024 |
|
RU2840012C1 |
| Электропривод переменного тока | 1985 |
|
SU1264294A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2002 |
|
RU2202812C1 |
Изобретение относится к области электротехники и может быть использовано в системах приводов летательных аппаратов, робототехники опорно-поворотных устройствах и других системах управления движением, для которых энергомассовые показатели имеют актуальное значение. Технический результат заключается в повышении энергомассовых показателей за счёт регулирования потребляемой мощности в зависимости от действия нагрузки, т.е. создание ЭМП обладающего свойством адаптивности по мощности к действию нагрузки. Технический результат достигается за счет введения обратной связи по разности скоростей располагаемой и требуемой, осуществляя потребление мощности от источника в зависимости от действия нагрузки, т.е. обеспечивая электромеханическому приводу адаптивность к действию нагрузки. Электромеханический привод содержит электронный усилитель, исполнительный электродвигатель с датчиком тока, механический редуктор, а также содержит датчики положения и скорости выходного вала. Сформирована и введена обратная связь на вход электронного усилителя по разности напряжений, соответствующей разности скоростей между располагаемой предельной механической и требуемой нагрузочной характеристиками для фиксированного значения момента. Требуемая скорость реализуется в виде сигнала с датчика скорости выходного вала привода, а располагаемая скорость реализуется вычислителем по сигналу с датчика тока электрического двигателя по зависимости 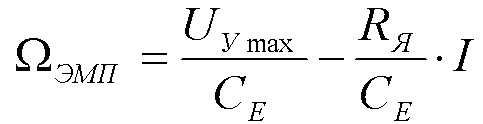 , где
, где  - максимальное напряжение сигнала управления;
- максимальное напряжение сигнала управления;  ,
,  - параметры ЭД соответственно: коэффициент противо-ЭДС, активное сопротивление якоря. 3 ил.
- параметры ЭД соответственно: коэффициент противо-ЭДС, активное сопротивление якоря. 3 ил.
Электромеханический привод с механической характеристикой, адаптивной к действию нагрузки, содержащий электронный усилитель, исполнительный электродвигатель с датчиком тока, механический редуктор, а также датчики положения и скорости выходного вала, отличающийся тем, что сформирована и введена обратная связь на вход электронного усилителя по разности напряжений, соответствующей разности скоростей между располагаемой предельной механической и требуемой нагрузочной характеристиками для фиксированного значения момента, при этом требуемая скорость реализуется в виде сигнала с датчика скорости выходного вала привода, а располагаемая скорость реализуется вычислителем по сигналу с датчика тока электрического двигателя по зависимости  , где
, где  - максимальное напряжение сигнала управления;
- максимальное напряжение сигнала управления;  ,
,  - параметры ЭД соответственно: коэффициент противо-ЭДС, активное сопротивление якоря.
- параметры ЭД соответственно: коэффициент противо-ЭДС, активное сопротивление якоря.
| US 2009011301 A1, 08.01.2009 | |||
| JP 2017163629 A, 14.09.2017 | |||
| Реверсивный электропривод | 1986 |
|
SU1372568A1 |
| Способ регулирования координат взаимосвязанных электроприводов | 2017 |
|
RU2655723C1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

