Изобретение относится к способам преобразования сигналов растрового датчика и может быть использовано в устройствах для точного отсчета угловых и линейных перемещений в системах программного управления станками, в системах навигации, в метрологии и т. д.
Известны способы отсчета линейных и угловых перемещений с растровыми датчиками, в которых входные сигналы вида sin 0 и cos в подаются с соответствующими опорными сигналами sinco/ и costo/ на сумматоры, в которых сигналы вычитаются, а затем разностные сигналы умножаются в умножителе и фильтруются.
В этой системе точность зависит от формы не только входных сигналов, но и опорных.
Цель изобретения - упрощение процесса преобразования и повыщение точности.
Это достигается тем, что синусными и косинусными сигналами растрового датчика модулируют по амплитуде и фазе соответствующие сигналы несущей частоты, сдвинутые по фазе на четверть периода с последующим суммированием и фильтрацией несущей частоты.
Форма сигналов несущей частоты может быть импульсной, а также синусоидальной или пилообразной при условии, что их амплитуда имеет достаточную величину.
Сигналы на выходе сумматора описываются уравнением;
6сум - Sinx Ui (/) +COSX U2(t),
где X - измеряемое перемещение, U(t), f/oCO-сигналы несущей частоты вида U,(t
1 приГ„ Г + /г
О при Т ()
U2(i) 3
/ 1
1 при Г (+,г)( -; +2/г
I -
V 4
о при 7 f4 + « f4+2aV V 4/ 4у
где 2 - период сигнала несущей частоты,
/г -целое натуральное число (О, 1, 2...). После фильтра сигнал принимает вид:
{./,i,.4sin(),
-
где to 2nf - -несущая частота.
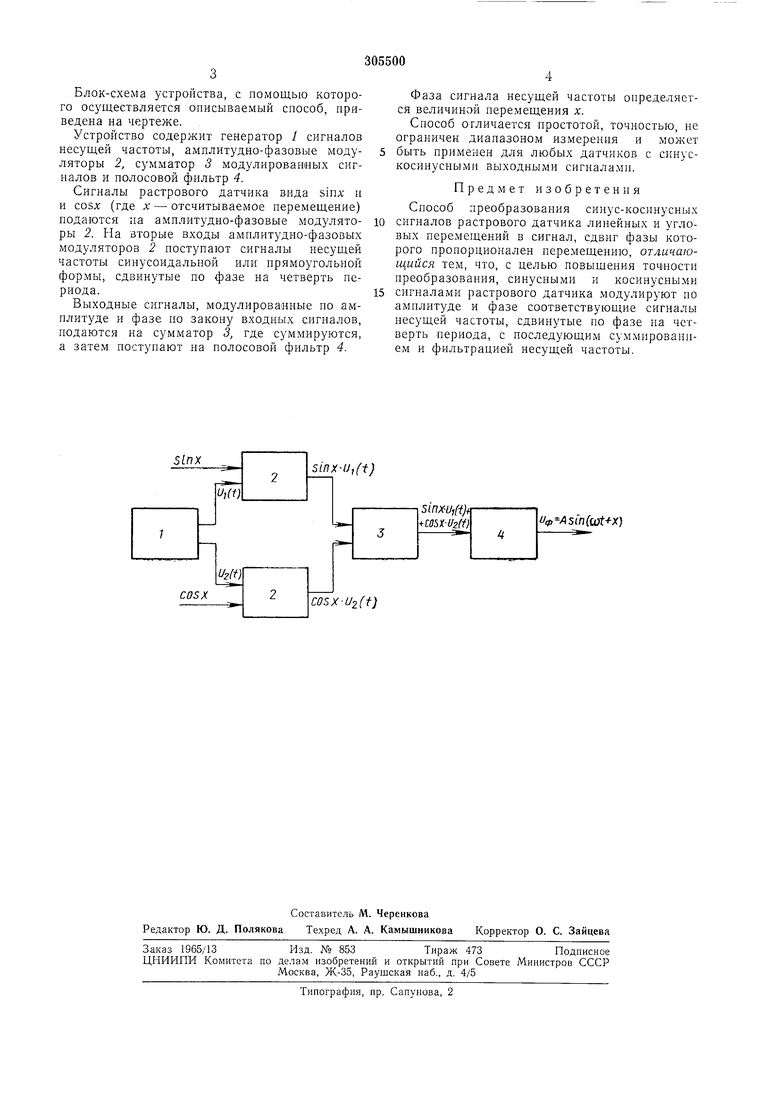
Таким образом, перемещению, равному одному шагу датчика, соответствует полный период изменения фазы сигнала несущей чагтоты на выходе фильтра. Блок-схема устройства, с помощью которого осуществляется описываемый способ, приведена на чертеже. Устройство содержит генератор 1 сигналов несущей частоты, амплитудно-фазовые модуляторы 2, сумматор 3 модулированных сигналов и полосовой фильтр 4. Сигналы растрового датчика вида sinx и и созл: (где х - отсчитываемое перемещение) подаются па амилитудно-фазовые модуляторы 2. На вторые входы амплитудно-фазовых модуляторов 2 поступают сигналы несущей частоты синусоидальной или прямоугольной формы, сдвинутые по фазе на четверть периода. Выходные сигналы, модулированные по амплитуде и фазе но закону входных сигналов, подаются на сумматор 3, где суммируются, а затем поступают па полосовой фильтр 4. Фаза сигнала несущей частоты определяется величиной перемещения х. Способ огличается простотой, точностью, не ограничен диапазоном измерения и может быть применен для любых датчиков с синускосинусными выходными сигналами. Предмет изобретения Способ преобразования синус-косинусных сигналов растрового датчика линейных и угловых перемещений в сигнал, сдвиг фазы которого пропорционален перемещению, отличающийся тем, что, с целью повыщения точности преобразования, синусными и косинусными сигналами растрового датчика модулируют по амнлитуде и фазе соответствующие сигналы несущей частоты, сдвинутые по фазе на четверть периода, с последующим суммированием и фильтрацией несущей частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Фотоэлектрический преобразователь перемещения в фазовый сдвиг сигнала | 1982 |
|
SU1030828A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УГЛОВОЙ МОДУЛЯЦИИ СИГНАЛА | 2003 |
|
RU2260901C1 |
| СПОСОБЫ И УСТРОЙСТВА ПОВЫШЕНИЯ ИНДЕКСА УГЛОВОЙ МОДУЛЯЦИИ | 2012 |
|
RU2493646C2 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU746656A1 |
| Способ преобразования перемещения в код | 1982 |
|
SU1136314A1 |
| Преобразователь перемещения в код | 1981 |
|
SU997064A2 |
| Преобразователь перемещения в фазу переменного сигнала | 1985 |
|
SU1266006A1 |
| Способ преобразования угловых перемещений в код | 1983 |
|
SU1135010A1 |
| Способ преобразования угловых перемещений в код | 1983 |
|
SU1137582A1 |
| Растровый интерполятор | 1977 |
|
SU622052A1 |
COSX
COS)(-U2(f)
