(54) ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЯ В КОД

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля преобразователей угла поворота вала в код | 1982 |
|
SU1027749A1 |
| Преобразователь перемещения в код | 1980 |
|
SU911583A1 |
| Способ преобразования угла поворота вала в код и устройство для его осуществления | 1989 |
|
SU1713103A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU926703A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU942097A1 |
| Преобразователь угловых перемещений в код | 1978 |
|
SU743002A1 |
| Устройство для контроля преобразователя угла поворота вала в код | 1988 |
|
SU1589391A1 |
| Преобразователь угла поворота вала в код | 1991 |
|
SU1797161A1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU752423A1 |
| Преобразователь перемещения в код | 1989 |
|
SU1656682A1 |
Изобретение относится к автомати- , ке и вычислительной технике и может быть использовано при обработке сиг налов перемещения в код.
По основному авт.св, № 911583 известен преое5разователь перемещения в код, содержащий источник питания, выходы которого соединены с первичной обмоткой синусно-косинусного датчика, четыре сумматора,четыре двухполупери одных выпрямителя, два фильтра нижний чартот, интерполятор и реверсивный счетчик. В устройстве осуществляется преобразование перемещения в цифро- вой код (в последовательность импульсов на выходе интерполятора - код унитарный) 1 .
Однако устройство не позволяет осуществ.лять контроль за измеряемьи перемещением, что сужает функциональные возможности. Наличие такого контроля позволяет иметь информацию о погрешности преобразователя и либо отдельно это регистрировать, либо далее эт.от сигнал использовать для коррекции преобразователя.
Целью изобретения является расширение функциональных возможностей путем обеспечения контроля измеряемого перемещения.
Поставленная цель достигается , тем, что в преобразователь перемещения в код введены привод, эталонный преобразователь перемещения в кодг формирователь импульсов, делитель частоты, триггер, третий фильтр ниж- них частот и регистрирующий , вал эталонного преобразователя перемещения в код кинематически соединен с .
10 приводом,и валом синусно-косинусного датчика,а выход соединен через последовательно соединенные формирователь импульсов и делитель частотыс первьв вхр- дом триггера,выход интерполятора соеди15нен с вторым входом триггера, выход которого соединен через третий фильтр нижних частот с регистрирующим блоком.
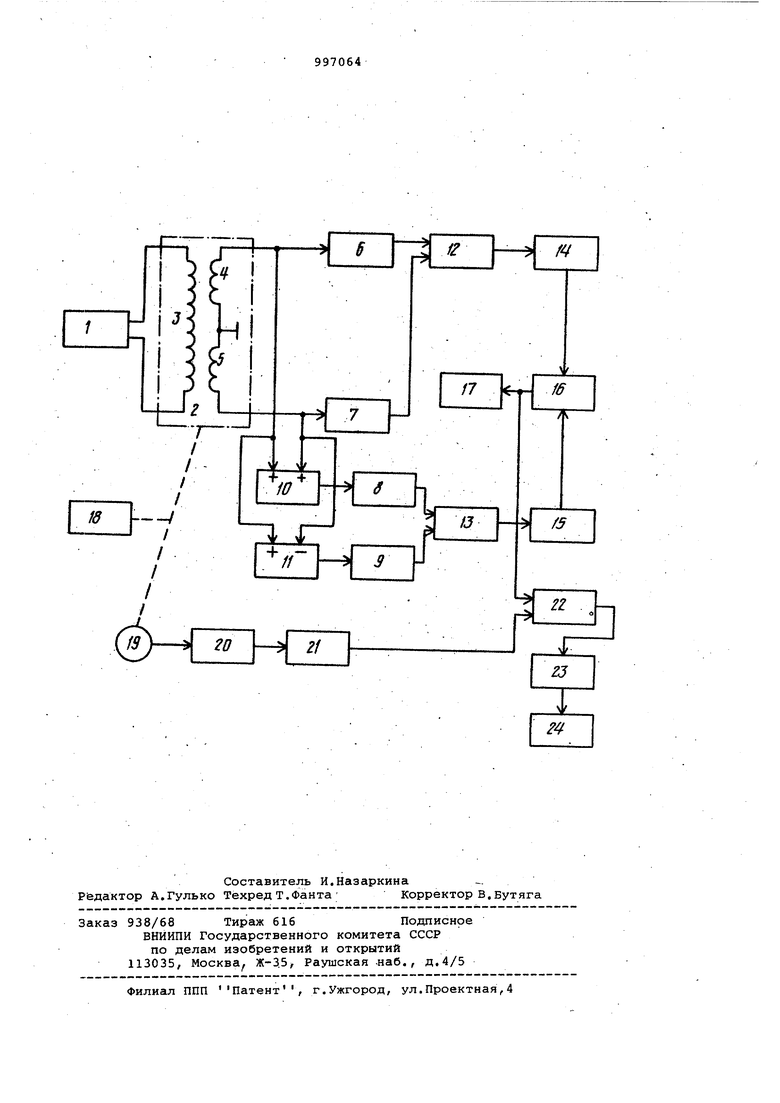
На чертеже изображена блок-схема
20 предлагаемого устройства.
Схема включает источник 1 питания, синусно-косинусный датчик 2 с первичной обмоткой 3 и выходнЪ1ми синусной 4 и косинусной 5 обмотками, двухполу25периодные выпрямители , сумматоры 10-13, фильтры 14 и 15 нижних частот, интерполятор 16, реверсивный счетчик 17, привод 18 с эталлонным преобразователем 19, формирователь 20 импульсов,
30 делитель 21 частоты, триггер 22, фильтр 23 нижних частот и регистриру ющий блок 24, Устройство работает следующим образом. При вращении оси синусно-косинусного датчика 2 (вращение осуществляется приводом 18, с которым,также жестко связана ось эталонного преобразователя 19) напряжения синусной. 4 и косинусной 5 выходных обмоток соответственно пропорциональны выражениям , . S1M A-siM(t)-t (.) C05dL-SinU)t {1) где cL - угол поворота подвижной части датчика 2; № - угловая частота напряжения питания датчика 2. Эти напряжения поступают на двухпериодные выпрямители 6 и 7, на выходе которых образуются сигналы (sind-SIHUJ :/ О) /cosd(.-siMa;t/ (4) Выпрямитель 7 выполнен так, что на его выходе получается сигнал, рав ный абсолютной величине сигнала ,.(2) с обратным знаком. Сигналы (З) и (4) суммируются в сумматоре 12, на выходе которого образуется, сигнал /uinu;t|(|eiMdl|-/c05cJL|) (Ю . . Огибающая; сигнала после суммирования имеет треугольную форму,, а ito частоте в 2 раза выше. Демодуляция этой огибающей осуществляется обЬгчным фильтром 14 нижних частот. Аналогичные преобразования претер певают сигналы синусно-косинусного,г датчика 2 в блоках 8-11, 13 и 15, В сумма,5горе 10 происходит суммирование сигналов (-1) и (2) , поэтому сигнал на его выходе пропорционален . (SWd -k-C05)5ina)t V siviGL-45°)siMa)i ((, В сумматоре 11 (в котором практически осуществляется вычитание, та как один из сигналов подается на инвертирующий вход) получается сигнал Ca d-CObc)siviU)t -Tr2C05(d-45)sivm;-t (1 Как .видно, амплитуды суммарных сигналов имеют амплитуду в 2 раза большую, чем у входного сигнала. Под бором коэффициента усиления сумматоров 10 и 11 амплитуду этих сигналов уравновешивают с амплитудой сигналов (1) и (2) (т,е, производят нормирова ние амплитуды), В -двухполярных В;ЫПрямителях 8 и 9осуществляется ввделение сигналов (б) и (7) с выхода сумматор 10ИИ,|5iv Cd-45}siMU)-i| w-Jco5((i-4 ;5inUJ-t/ (Ъ) в сумматоре 13 суммируются сигнал (8) и получается сигнал IS v4ytK(5ivi(di-4b }|-|cosU-45;/ (9; Фи тьтруя несущую частоту сигнала (9) в фильтре 15, подучаем на его выходе треугольный сигнал, который, однако сдвинут относительно сигнала на выходе фильтра -14 на.90°, Таким образом, на выходах фильтров 14 и 15 образуются два треугольных сигнала удвоенной частоты, сдвинутых друг относительно друга на 90, Оба сигнала поступают на интерполятор 16, на выходе которого образуются выходные сигналы в виде последовательности имрульсов, период которых в Р раз меньде периода входных треугольных сигналов, где Р - коэффициент интерполяции. Эти импульсы содержат всю-информацию о перемещении (унитарный код) и при необходимости подсчитываются счетчиком 17, Если синусно-косинусный датчик характеризуется погрешностью, то при преобразовании перемещения в код расстояния между выходными импульсами на выходе интерполятора неодинаковы. Одновременно с осью синусно-косинусного датчика вращается ось эталонного высокоточного преобразователя 19, Последний формирует за о борот.У импульсов (обычно он является фотоэлектрическим растровым, но может быть иного типа). Величину N может составлять количество импульсов порядкаЗбОО-10800 и выше, точность эталонного преобразова-. теля л .выбирается исходя из точности синусно-косинусного датчика и может составить величину порядка нескольких угловых секунд, В формирователе 20импульсов формируются импульсы и поступают на обычный делитель 21 частоты, на его выходе образуется импульсов, где W -.коэффициент деления, равномерная последовательность которых поступает на первый вход триггера 22, на второй вход которого поступают импульсы с выхода интерполятора 16. Регистрация колебаний фазового угла между обеими последовательностями и представляетсобой операцию контроля за перемещением. В триггере 22 фронтом (например, передним) импульсов с делителя 21частоты триггер переводится из исходного логического состояния в другое, а фронтом импульсов с выхода интерполятора 16 триггер 22 возвращается в исходное логическое состояние, т.е., если сйнусно-косинусный датчик не обладает погрешностью (т.е. последовательность импульсов с выхода интерполятора 16 равномерна), то на выходе триггера 22 формируется последовательность прямоугольных импульсов .одинаковой длительности. Поэтому на выходе фильтра 23 нижних .частот образуется постоянное напряжение, которое принимае.тся за нулевую линию отсчета. Она и регистрируется в регистрирующем блоке 24, подключенным на выходе фильтра 23. Если оинусио-косинусный датчик характеризуетсй погрешностью, то последовател ность импульсов с выхода интерполятора 16 неравномерна, поэто му прямоугольные импульсы на выходе триггера 22 имеют неодинаковую длительность, которая меняется в течение периода пропорционально погрешности, т.е. на выходе триггера имеет место широтно-импульсная модуляция (ШИМ). При интегрировании ШИМ импульсов на выходе фильтра 23 образуется кривая погрешности, фиксируемая блоком 24. Запись этой кривой (например, на самописце) осуществляется автоматически. ; Например, синусно-косинусный датчик типа резОльвер за оборот формирует И информационных сигналов (так как И - число пар полюсов в датчике), они умножаются на fi в интерполяторе и еще на 2 при образовании треугольных напряжений, таким образом всего за оборот получается 2ри: импульсов, поступающих н первый вход триггера 22, а на второ поступает число импульсов за оборот равное . Параметры N и П} выбираются исходя из известного числа У пар полюсов синусно-косинусного датчика и коэффициента интерполяции р в соо ветствии с уравнением 2p|i- , напри мер, при и р - 20, число N мо жет быть выбрано равным 3600 при VYi Таким образом, в предлагаемом яэобрётении расширяются функциональ ные возможности путем обеспечения контроля за погрешностью преобразуемого переме1цеиия, который осуществляется автоматически, сигнал, пропорциональный погрешности, может, быть использован для последующей коррекции точности.Перечисленные обстоятельства обуславливают технико-экономический эффект, связанные с расширенны ми функциональными возможностями. Формула изобретения Преобразователь перемещения в код по авт.св. 911583,-о т л и ч а ющ и и с я тем, что, с целью расширения функциональных возможностей, в него введены привод, эталонный преобразователь перемещения в .код, формирователь импульсов, делитель частоты, триггер, третий фильтр нижних частот и регистрирукицйй блок, вал эталонного преобразователя перемещения в код кинематически соединен с приводом и валом синусно-косинусного датчика, а выход соединен через последовательно соединенный формирователь импульсов и делитель частоты с первым входом триггера, выход инЧ терполятора соединен с вторым входом триггера, выход которого соединен через третий фильтр нижних частот с регистрирующим блоком. Источники инофрмации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 911583, кл. G 08 С 9/04, 1982 (прототип).
