Изобретение относится к оборудованию для комплексной механизации шахт. Оно может быть применено в качество механизма для передвижения элемептов оборудования и машин, например забойного конвейера, механнзированной крепи.
Известны групповые гидроприводы с перемешением силовых гидроцилиндров посредством дроссельных делителей потока жидкости, объемных дозаторов и других.
Однако гидроприводы с дроссельными делителями потока жидкости не имеют достаточно высокой точности синхронизации и не обеспечивают перемеш;ение гидроцилиндров на строго определенный ход.
У гидроприводов же с объемными дозаторами не одинаковое перемещение всех гидроиилиндров вследствие утечек жидкости и накопления воздуха в гидросистеме.
Целью изобретения является обеспечение синхронного перемещения всех гидроцилиндров в одну сторону и независимого перемещения каждого гидроцилиндра в обратную сторону.
Это достигается тем, что внутренняя обратная связь однопоршневых гидроцилиндров выполнена в виде скалки, имеющей ряд выступов и впадии, расиоложенной внутри полого штока и соединенной с корпусом гидроцилиндра, и клананов, расположенных в поршне, взаи.модействующих с выступами и впадинами скалки и связанных гидравлически с одной стороны с иоршневой полостью гидроцилиндра, с другой - с подводящими каналами внутри штока. Для автоматического коитроля перемещения гидроцилиидров в поршие каждого гидроцилиндра становлен нндуктивный датчик электрических импульсов, взаимодействующий с выступами и внадинами скалки.
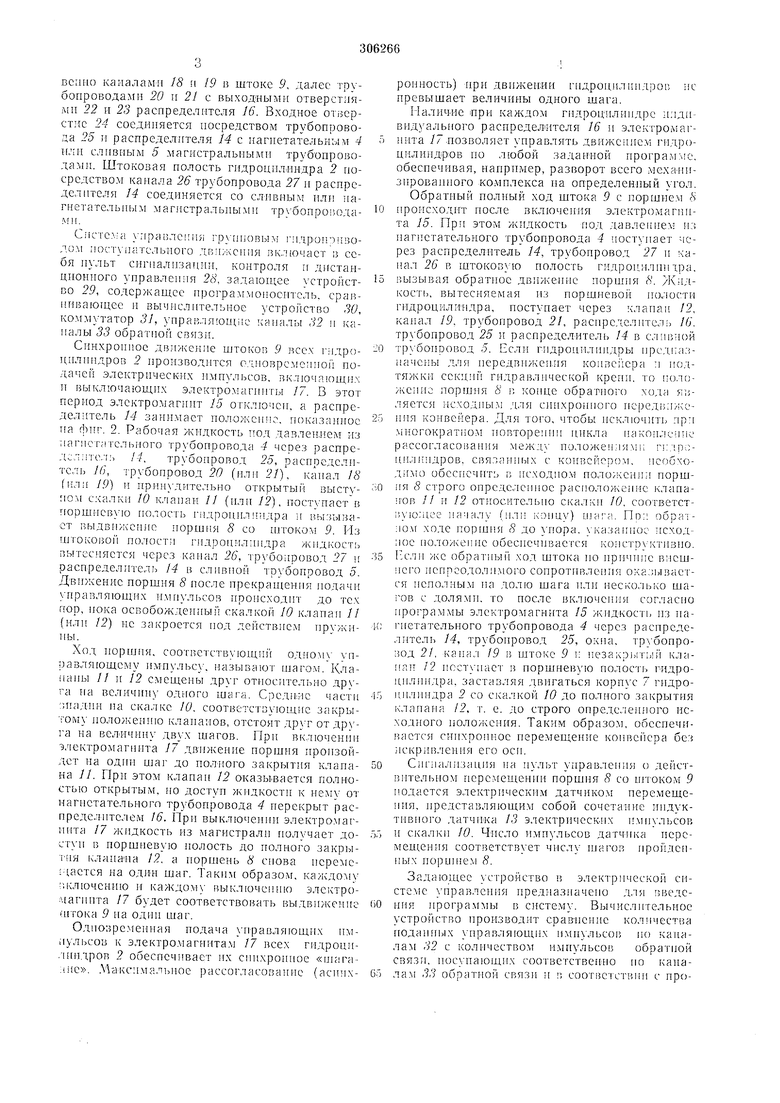
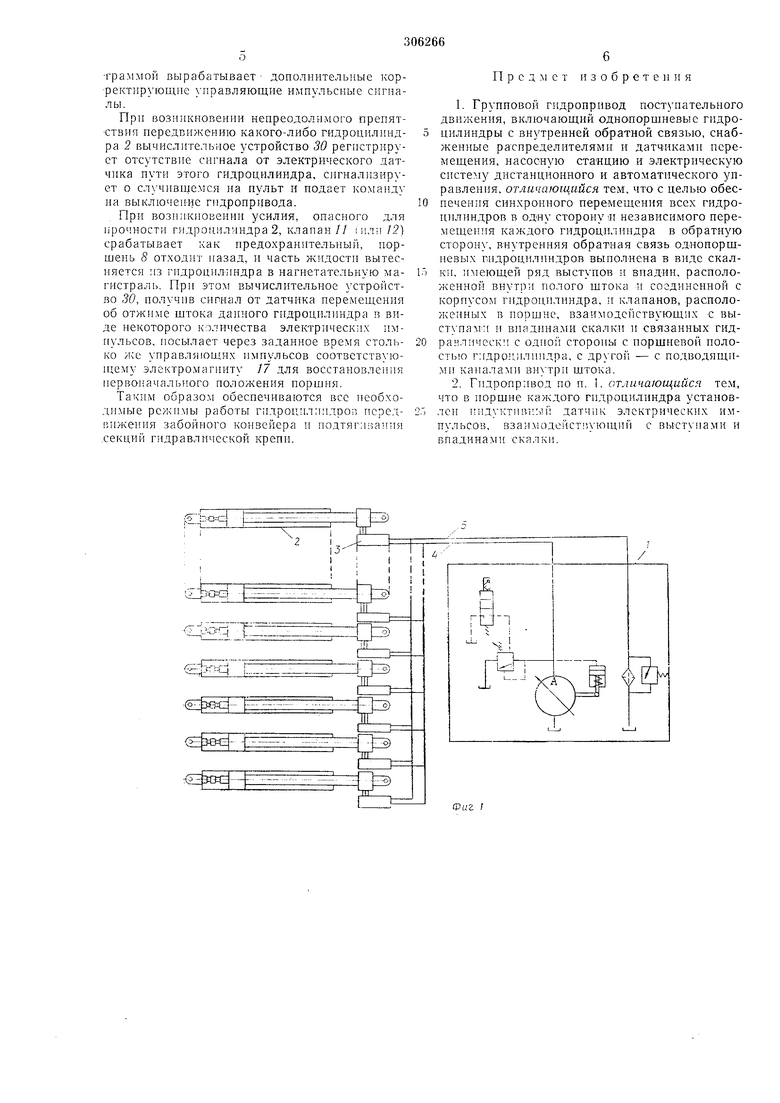
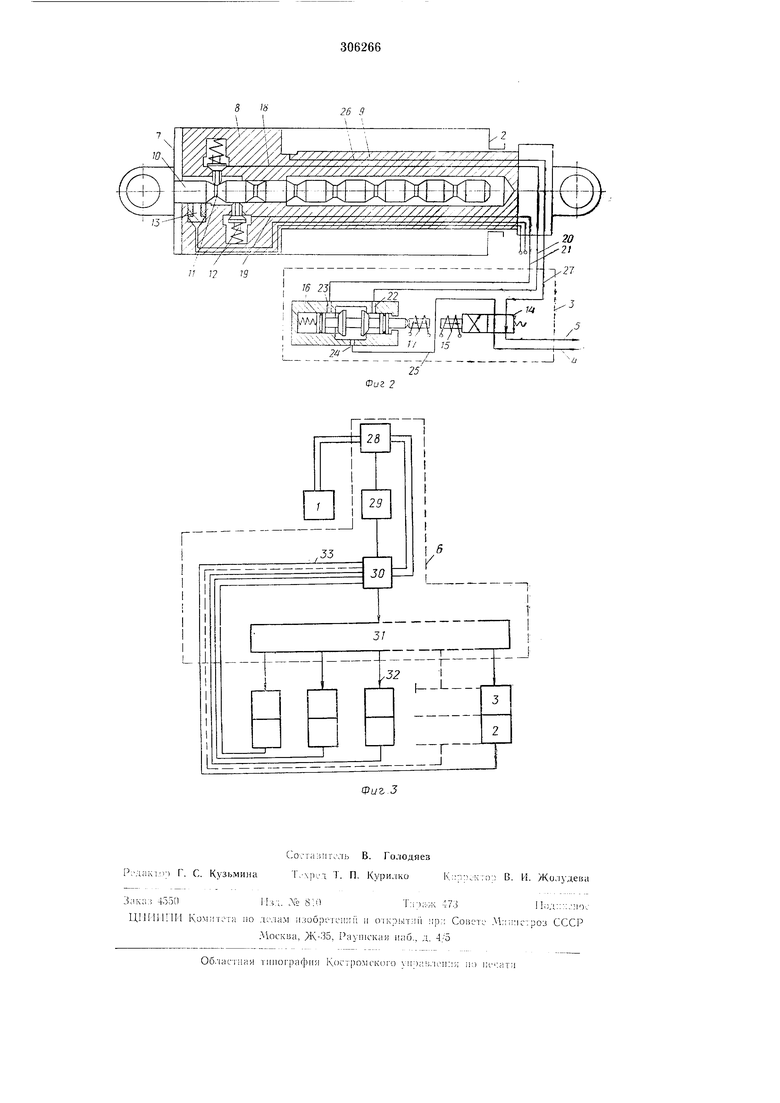
На фиг. 1 изображен групповой гидропривод, общий вид; иа фиг. 2 - схема шагового гидроцилиндра с блоком распределителей; на фиг. 3 - блок-схема системы управлеиия групиоБы.м гидроприводом.
Описываемый гидроиривод включает насосную станцию /, гидроЦИлиидры 2, блоки распределителей 3 с электромагнитным управлением, иагиетательный 4 и сливной 5 магистральпые трубонрово.ты, а также систел у управлеиия груиповым гидроприводом 6.
Гидроцил П1др 2 имеет корпус 7. поршень 8, шток 9, скалку 10, два клапана // и 12 (либо две групиы клапанов) и индуктивный датчик /о электрических импульсов.
Блок распределителей 3 содержпт двухпозициоиный четырехходовой распределитель 14 плоского типа с управляющим э.тектромагнитом 15 и двухтактный распределитель 16 клапанного типа с управл.яющи.м электромагиитом /Г. Клапаны // и 12 соединепы соответствспио каналами 18 и 19 в штоке 9, далее трубопроводами 20 п 21 с выходными отверстиями 22 II 23 раепределителя 16. Входное отверстие 24 соединяется поередством трубопровода 25 и распределителе 14 с нагнетательным 4 К.ЧИ слявиым 5 магистральными трубопроводами. Штоковая полость гидроциллндра 2 посредством капала 26 трубопровода 27 п распределителя 14 соединяется ео сливным пли иагнетателыилм магистральнымн трубонроюдаМ II.
Систе..а хправлеиия групповым гидрОитиводо.м поступателыюго движения включает и себя спгпализаиин. контроля и дистапдпонного управления .26, задающее устройство 29, содержащее нрограммоносптсль. сранпивающее и вычислптельпое устройство 30, коммутатор 31, управляюи с усапалы 32 и каналы 55 обратиой СВЯ.ЗИ.
Синхронное движение штоков 9 всех г;1др()цилиндров 2 производится одновременной подачей электрнческн.х илшульеов, вкл очаюш.пх и выключающих электромагппты 17. В этот период электромагнит 15 отключен, а распределитель 14 занн.мает иоложеило, показаииое па фиг. 2. Рабочая жидкость под давлен.ием из иагистательпого трубопровода 4 через распредсл.мте.-1: 4, трубопровод 25, распределитель /с;, трубопровод 20 (или 21, капал 18 (или /.9) и принудительно открытый выступом схалкп 10 клапан // (плп 12, поступаетв поршневую полость гидроппл П Дра ii вызывает выдвиженнс норшня 8 со HJTOKOM 9. Из штоковой полости гидроиилиидра жидкость вытссияется через капал 26, трубо;фовод 27 и распределитель 14 в слпвион трубопровод 5. Движение поршня 8 после прекран1еппя подачн л1равляющпх импульсов пронсход1гг до тех пор, нока освобожденный скалкой 10 клапан // (нлн 12 не закроется под действпем пружии ы.
Хо.т, поршня, соответствуюши ОДНОМ} управляющему пмпульсу, называют niaroM. Клаианы // н 12 смещены друг относительно друга па величину одного шага. Средпде части -зиаднн па екалке 10, соответствующие закрытому положенню клананов, отстоят от друга на велнчину двух шагов. Прн включении электромагнита 17 движение поршня нроизойдет на одни шаг до полного закрытия клаиана п. Прн этом клапап 12 оказы вается полпостью открытым, но доступ жпдкостп к иему от нагпетательпого трубопровода 4 перекрыт распреде.лптелем 16. При выключенпи электро.магинта 17 жидкость из магистрали получает доступ в поршневую полость до полного закрытия клапа 1а 12. а поршень 8 снова неремегчается на один шаг. Таким образом, каждо у ;.ключению п каждому выключению электрочагннта 17 будет соответствовать вы.движение (нтока 9 на одпн шаг.
Одновременная подача унравляющих нмпульсов к электромагнитам 17 всех гндроци.iniiipOB 2 обеспечивает их сиихроииое «niaraлис. ..1алы1ое рассогласование (acHiixронность) при двпжеп;ии гпдропплнпдров не превышает величины одного шага.
Маличие при каждом гпдроцилиидре ипдивидуальпого распределителя 16 и электрома иита /7.позволяет управлять движением гидроцилиидров ио любой задапной нрограмл е. обееиечпвая, напрпмер, разворот всего мехаппзнрованного комплекеа па определенпый угол.
Обратный полный ход штока 9 с поршием 8 происходит после включения электромапшта 15. При этом жидкость под давлением из иагиетательного трубопровода 4 иостуиает через распределИтель 14, трубопровод 27 и капал 26 в штоков то полоеть гидрон.илпитра, вызывая обратпое двпж;еппе поршпя fS. /К 1дKOCTi), вытесняемая нз поршневой по.юетп гидроцилипдра, поступает через клапан 12, капал 19, трубопровод 21, раепределптель 16. трубопровод 25 и раепредел-итель 14 в СЛР.ВИОЙ трубопровод 5. Если гидропил1П1Дры iipe.Ti;a3пачены для иередвижен.ия коиве1 ера и подтяжки секиий гидравлической . то положение поршня 8 г, копце обратного хода является нсходпьгм для с пгхрои11ого передви/кепия конвейера. Для того, чтобы нсключить при .хпюгократном повторении никла након.пспие рассогласования ноло/кен.чями rr/ipcцилнидров. связаииых с конвейером, ieo6xoД мо обесисчпть в исходном положеиии поршни 8 строго опре.;лелеиное расположение клапанов // п 12 относительпо скалкп 10. соответстi yio;nee началу (или )пиу) njara. Поп обрат:ю.м хо.те поршпя 8 до лтюра. указапиос исходное положение обесиечивается коиструктивио. Г.сли же обратный ход штока ио нричине вмсш iero непреодолимого соиротгп лепия оказывается иеиолным на долю шага нлн несколько шагов с долями, то после включепия согласпо программы электромагнита 15 жидкость -л иагиетательиого трубопровода 4 через распределитель 14, трубопровод 25, окиа, трубопровод 21. канал 19 в штоке 9 i: незакрь1ть Й клаиаи 12 поступает в поршпевую полость гидроцнлнн.тра, заставляя двигаться корпус 7 гидроиилиидра 2 со скалкой 10 до полного закрытия клапапа 12, т. е. до строго определенного иеходного положения. Таким образо.м, обеспечивается сипхро1И-1ое перемещение копвейера без искривления его ocir
Сиг;|ализаппя на пульт уиравлепия о действительпом иеремещеппп иоршия 8 со п током 9 подается электрпчеекп.м датчиком перемещения, представляющим собой сочетание индуктнвного .татчи ка 13 электричеекнх н.миульсов н скалки 10. ЧИсло импдльсов датчика перемеш,ення соответетвует числу пройдеп1Пз х nopnnieM I.
Задающее ус1ройство is электрической системе управлепия предназначепо для введеиия ирограм: 1Ы в систему. Вычиелительное устройство производит сравпенне колпчества подап1П)1х т1равляющ11х п.мпчльсог. ио каналам 32 с колпчеством импульсов обратиой связи, иоеуиаюидих с()01ветствеи 10 ио канала.м 33 обратиой связи и г, соот1 етствии с ирограммой выраоатывает дополнительные корректирующие уиравляющие импульсные сигналы.
При возиикиовении неиреодолимого препятствия передвижению какого-либо гидроцилиндра 2 вычислительное устройство 30 регистрирует отсутствие сигнала от электрического датчика пути этого гидроцилиндра, сигнализирует о случившемся на пульт и подает команду на выключение гидропривода.
При возникновении усилия, опасного для прочности гидронилиндра2, клапан // шли 12 срабатывает как нредохраинтельный, поршень 8 отходит назад, и часть жидости вытесняется из гидроцилиндра в нагнетательную магистраль. При этом вычислительное устройство 30, получив сигнал от датчика перемеш,ения об отжиме штока данного гндроцилнндра в виде некоторого количества электрических нмнульсов, носылает через заданное время столько се управляющих импульсов соответствуюидему электро.магниту /7 для восстаиовлення нервоначального положения поршня.
Таким образо.м обеспечиваются все Tieo6xoди.мые режимы работы гидроцилпидроп перед Л1жения забойного конвейера и иодтяг:1 5аиия секций гидравлической крепи.
6 Предмет изобретения
1. Групповой гидропривод поступательного движения, включающий однопорщневые гидроцилиндры с внутренней обратной связью, снабженные распределителями и датчиками перемещения, насосную станцию и электрическую систему дистанционного и автоматического управления, отличающийся тем, что с целью обеспечения синхронного перемещения всех гидроцнлнндров в одну сторону Н независимого перемещения каждого гидроцнлиндра в обратную сторон}, внутренняя обратная связь однопорщневых гидроцилин.дров выполнена в виде скалки, имеющей ряд выступов и впадин, расположенной внутри полого щтока и соединенной с корпусом гидроцнлнндра, и клапанов, расположенных в порщие, взаимодействующих с выступам и и внадниами скалки и связанных гидранлическп с одной стороны с поршневой полостью глдррцилиидра, с другой - с подводящнми каналами виутрн штока.
2. Гидропривод по п. I. отличающийся тем, что в иорщие каждого гидроцилиндра установлеи индуктивный датчик электрических импульсов, взаимодействующий с выступами и впадинами скалки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Групповой шаговый гидропривод поступательного движения | 1976 |
|
SU584106A1 |
| Шаговый гидропривод | 1975 |
|
SU569757A1 |
| Гидропривод захватно-срезающего устройства | 1979 |
|
SU879064A1 |
| Грейферный погрузчик | 1976 |
|
SU544609A1 |
| Гидропривод возвратно-поступательного движения | 1976 |
|
SU612077A1 |
| Устройство управления клапаном противоразгонной защиты радиальных гидротурбин | 1976 |
|
SU731094A1 |
| ОБЪЕМНЫЙ ГИДРОТРАНСФОРМАТОР | 1969 |
|
SU239802A1 |
| ШАГОВЫЙ ГИДРОПРИВОД | 1971 |
|
SU414437A1 |
| Шагающее ходовое оборудование | 1986 |
|
SU1342986A1 |
| Гидропривод механизма подъема-спускания рабочего оборудования | 1976 |
|
SU580367A1 |
,35
