В области автоматизации производственных процессов и в устройствах программного управления известны датчики линейных и угловых перемещений, содержащие магнитоуправляемые контакты - переключающий и два замыкающих, укреплеииые на неподвил ном объекте, и блок подвижных постоянных магнитов.
Предлагаемый датчик отличается от известных тем, что в нем замыкающие магнитоуправляемые контакты, соединенные последовательно с размыкающей частью переключающего контакта, установлены со двигом по обе стороны от центра переключающего контакта на расстояние, насколько меньщее половины межполюсного расстояния каждого из постоянных магнитов, укрепленных в блоке одноименными полюсами навстречу.
Это позволяет повысить разрешающую способность датчика.
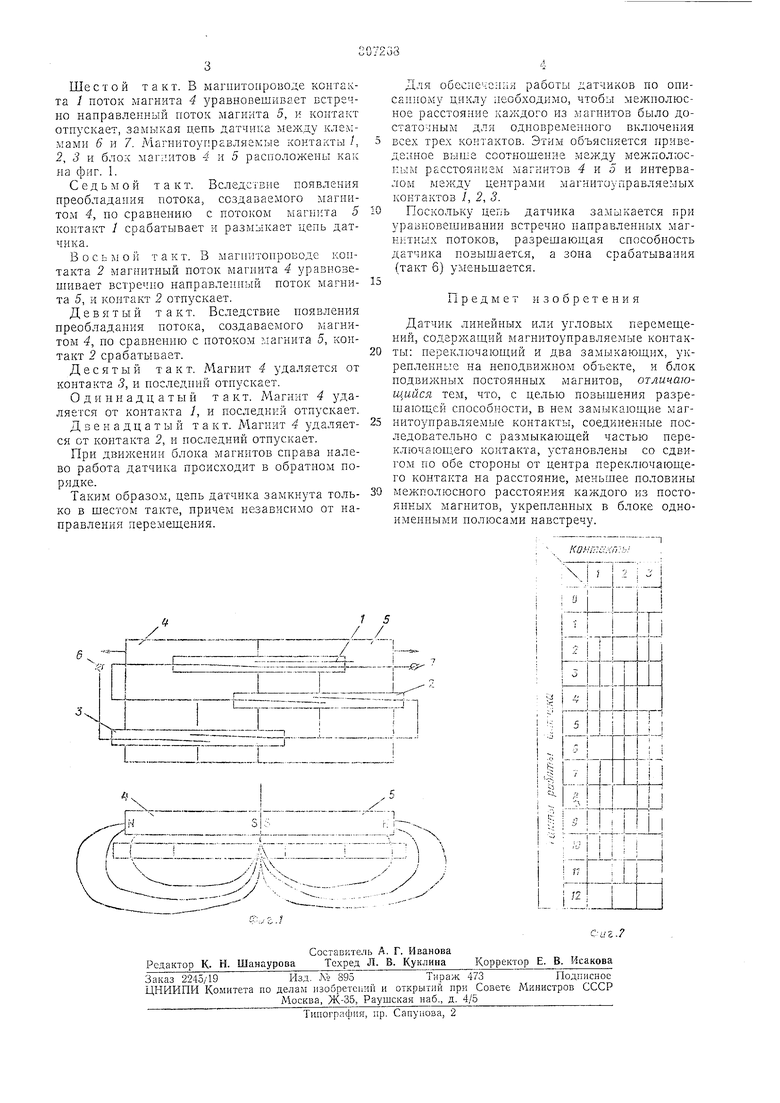
На фиг. 1 представлена конструкция и электрическая схема описываемого датчика; на фиг. 2 дана таблица, поясняющая работу датчика (по тактам).
Описываемый датчик ,(фиг. 1) состоит из трех герметизированных магнитоуправляемых контактов (тип КЭМ): переключающего и двух замыкающих 2 и 3, закрепленных на неподвижной части оборудования параллельно направлению перемещения, и движуп1.егося блока постоянных магнитов 4 и 5. Замыкающие магнитоуправляемые контакты 2 и 3 сдвинуты по обе стороны от центра переключающего 1 контакта на расстояние, немного меньшее половины межполюсиого расстояния
каждого из магнитов 4 и 5. Замыкающие контакты 2 к 3 включены последовательно с размыкающей частью переключающего контакта 1. Концы цепи подсоединены к клеммам 6 и 7 датчика.
Постоянные магниты 4 и 5 имеют форму ирямоугольных параллелепипедов и закреплены так, что одноименно намагниченные грани соприкасаются в полости, перпендикулярной направлению движения.
Рассмотрим работу датчика при движении блока магнитов слева направо (фпг. 2).
Первый
такт. Магнит 5 включает контакт 5. такт. Магнит 5 включает конВторойтакт 1.
Третий
такт. Магнит 5 включает коитакт 2.
Четвертый такт. В магиитопроводе контакта 3 магнитный поток магиита 4 уравновешивает встречно направленный ноток магнита 5, и контакт отпускает.
Пятый такт. Вследствие появления преобладания потока, создаваемого магнитом 4, по сравненню с потоком магнита 5, контакт 3 отпускает.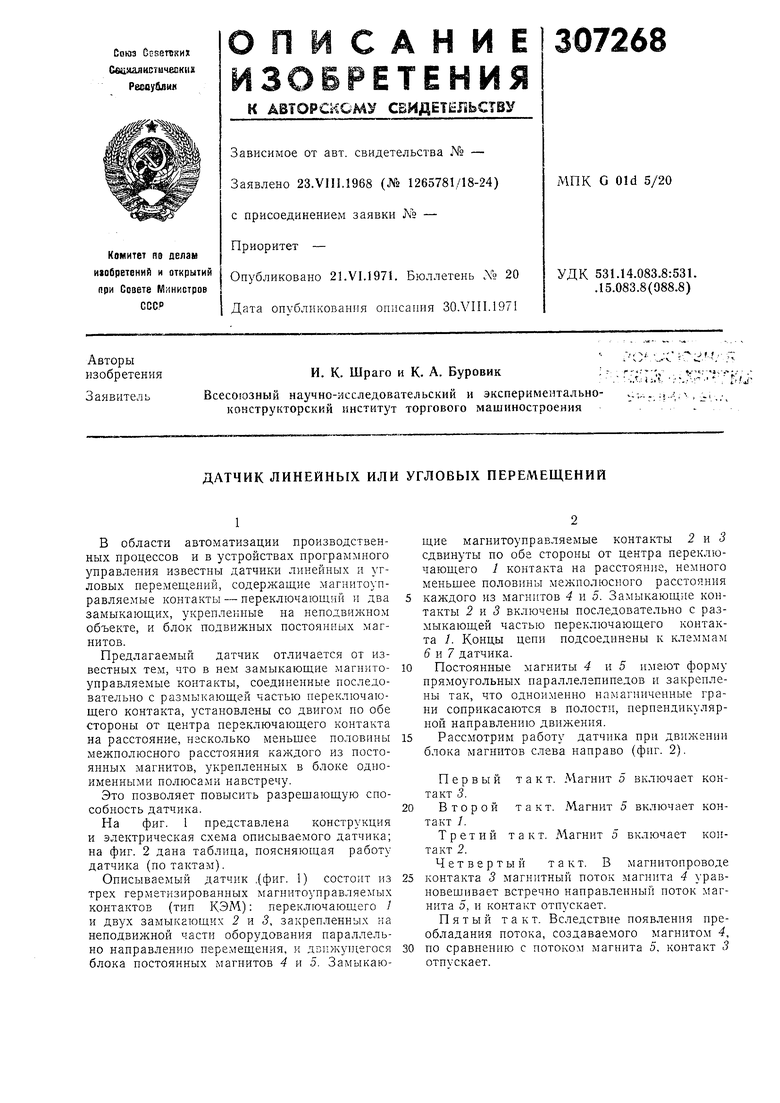
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления стволом гидромонитора | 1980 |
|
SU883452A1 |
| Датчик положений рабочего органа механизма | 1979 |
|
SU873132A1 |
| Скважинный расходомер | 1987 |
|
SU1463907A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК ПОЛОЖЕНИЙ РАБОЧЕГО ОРГАНА МЕХАНИЗМОВ | 1973 |
|
SU362789A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 1970 |
|
SU281251A1 |
| ВСЕСОЮЗНАЯ :|fiAiEfiTHO-]iXHi;--;'ifAiБИБЛИОТСКА | 1971 |
|
SU304460A1 |
| КООРДИНАТНЫЙ СОЕДИНИТЕЛЬ | 1972 |
|
SU351339A1 |
| ДАТЧИК КОНТРОЛЯ ЦЕЛОСТИ ЦЕПЕЙ ДВУХЦЕПНОГО СКРЕБКОВОГО КОНВЕЙЕРА | 1970 |
|
SU275956A1 |
| Коммутационное устройство | 1987 |
|
SU1580453A1 |
| Магнитоуправляемый выключатель | 1990 |
|
SU1786527A1 |
