Известны Моделирующие устройства дли автоматического управления экскаваторами, например роторными, содержащие датчики координат положения центра ротора, маятниковый механизм и соединенные между собой следящее множительное устройство, сумматоры, вентили, компенсирующие усилители и потенциометры.
Предложенное устройство отличается от известных тем, что в нем выход датчика одной из координат соединен со входом следящего множительного устройства и через сумматор, компенсирующий усилитель и вентили подключен ко входу привода подачи стрелы и к потенциометру, присоединенному через вентнль, сумматор и другой компенсирующий усилитель ко входу привода маятникового механизма и ко входу сумматора, выход которого подключен ко второму входу сумматора цепи привода нодачи стрелы, а второй вход соединен через вентиль с потенциометром. Выходы маятникового механизма и датчика отклонения экскаватора соединены с тремя входами следящего множительного устройства, два выхода которого через потенциометры, сумматор и вентиль присоединены ко входу сумматора, присоединенного вторым входом через дополнительный вентиль к третьему выходу следящего множительного устройства и подключенного выходом ко входу сумматора, выход которого через компенсирующий усилитель и вентиль присоединен ко входу привода подъемника несущей стрелы. Выход компенсирующего усилителя привода маятникового
механизма через клапан и потенциометр присоединен ко второму входу подключенного к нему сумматора, третий вход которого через вентиль и вспомогательный сумматор подключен к одному из выходов следящего множительного устройства, одному из входов сумматора в цепи привода подачи стрелы и выходу потенциометра, вход которого соединен со входом сумматора в цепи привода подъемника несущей стрелы и выходом сумматора, подключенного одним из входов через потенциометр и вентиль к выходу компенсирующего усилителя той же цепи и вторым входом-к цепочке из последовательно включенных вентиля и поте щиометра.
Эти особенности позволили повысить точность и расширить функциональные возможности устройства.
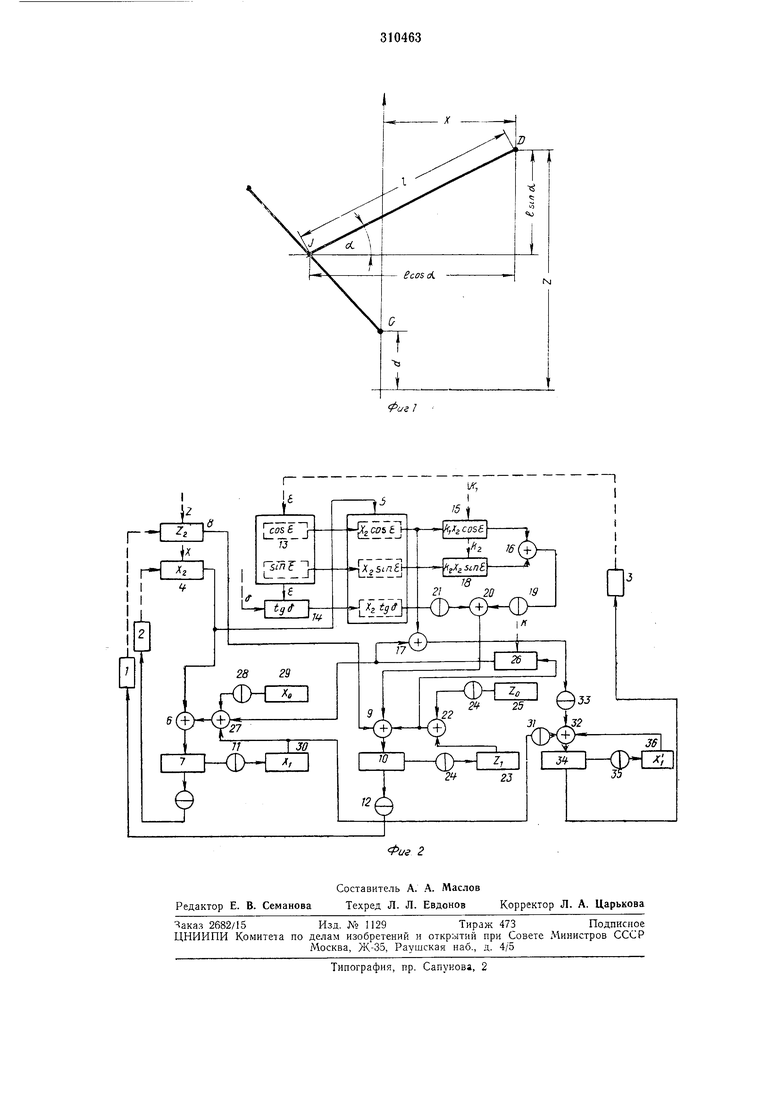
На фиг. 1 показана функциональная схема
экскаватора; на фиг. 2-электрическая схема программного устройства.
Работа моделирующего устройства связана с работой основного привода, т. е. с работой привода / подъемника несущей стрелы, с раэкскаватора. Положение D центра р отора определяется координатами X Z и е. Координата А представляет собой расстояние ротора от оси вращения экскаватора, координата Z-расстояние оси ротора от плоскости продвижения экскаватора, а координата е-угол вращения проекции оси X в плоскости продвижения экскаватора. Координаты А и Z выражаются в виде напряжений Х.У и Z-2, а координата е остается в виде истинного угла вращения роторного экскаватора. Базисом выражения электрических координат является длина «несущей стрелы и входное напряжение сельсинного анализатора, расположенного в точке /, т. е. в центре сочлепения стрелы над подающи.м грейфером. Сельсинный анализатор, ротор которого смещен под углом а, т. е. углом между соединительной линией D - У и прямой линией, параллельно плоскости передвил :ения и проходя через центр /, имеет входное напряжение, пропорциональное неизменяемой длине несущей стрелы, в силу чего отношение мелсду указанным напряжением и длиной / определяет масштаб модели. Тогда выходное напряжение сельсинного анализатора на одном из выходов будет пропорционально /sin а, а на другом выходе пропорционально /cosа, которое выражает проекцию длины стрелы в направлении координат X и Z. Смещение точки /, которая представляет собой мгновенное положение стрелы между конечными положениями /, сочленения стрелы при перемещающемся грейфере снимается двойным потенциометром, в силу чего напряжение на калодом потенциометре выбирается таким образом, что входное напрял ение при заданном масштабе будет пропорционально проекции длины h, которая изображает расстояние между сочленением / несущей стрелы и конечным положением G, в направлении координат X w. Z. Большее напряжение выражается высотой d т. е. высокой точки G над плоскостью перемещения. Координаты X-i и Z выражаются суммой отдельных напряжений в направлении координат и Z. Выход датчика 4 координат X связан со входом следжцего множительного устройства 5, а также посредством первого сумматора 6-с компенсирурощим усилителем 7. Выход датчика 8 координат Z связан посредством сумматора 9 со вторым компенсирующим усилителем 10. Выходы первого и второго компенсирующих усилителей 7 и 10 связаны посредством вентилей 11 и 12, а также посредством схем управления привода 2 перемещения экскаватора и привода / подъема стрелы со входами датчиков 4 ц 8 координат X и Z. Два выхода датчика координат е маятниконого механизма 13 экскаватора и выход датчика 14 отклонения б экскаватора соединяются с тремя входами следящего множительного устройства 5. Наряду с датчиками координат в маятнитакже перемещается под углом в направлении е. Датчик 14 образуется с помощью сельсипного мостика, на валу которого эксцентрически монтируется груз (движение груза демпфируется маслом). Угловое смещение ротора датчика 14 отклонения б выражается отклонением плоскости перемещения экскаватора от горизонтальной в такое направление, где датчик перемещается под углом. Первый выход следящего множительного устройства 5, которое обрабатывает данные о положении экскаватора, соединен, с одной стороны, посредством потенциометра 15 с сумматором 16, а, с другой стороны,-с сумматором 17. Второй выход следящего мнол ;ительного устройства 5 соединен сумматором 16 через потенциометр 18. Сумматор 16 соединен через вентиль 19 сумматором 20, к которому через вентиль 21 подключен третий выход с.тедящего множительного устройства 5 и сумматор 9. Сумматор 9 соединен через сумматор 22 потенциометра 23 и вентиль 24 с компенсирующим усилителем 10. Со входом сумматора 22 соединены также вентиль 24 и потенциометр 25. Кроме того, сумматор 22 соединен с потенциометром 26, подключенным к сумматору 17, и сумматором 27. Сумматор 27 соединен с входом сумматора 6 с вентилем 28 потенциометра 29 и потенциометром 30. Потенциометр 30 соединен через вентиль 31 с сумматором 32 к которому через вентиль 33 присоединен сумматор 17. Сумматор 32 соединен также с третьим компенсируюпщм усилителем 34, к которому через вентиль 35 подключен потенциометр 36. Третий компенсирующий усилитель 34 соединен также с приводом маятникового механизма. Сельсинный анализатор датчиков координат е снимает угол е, который изображает маятниковое движение экскаватора. Выходное напряжение, выраженное компонентой sine, cos е, пропорционально углу е. Выходное напряжение датчика 14 отклонения б для небольших углов б пропорционально величине tg6. Эти данные, которые связаны с положением экскаватора, обрабатываются в следящем множительном устройстве 5 таким образом, что напряжения cose,, sine и tg6 умнол аются на напряжение Х.2. Произведения Aacose и X.sms передаются потенциометрами 15 и 18, где величина этих напряжений умножается на ностояпные /d и К, определяемые с помощью механической настройки потенциометров. Они изображают ручным образом выбранные величины, соответствующие отклонениям плоскости. Потенциометры 23, 30 и 36, с помощью которых вычислительное устройство образует дополнительные напряжения Х, Z-i и Х , в соответствии с настройкой вентилей //, 24 и 35 управляются с помощью компенсирующих усилителей 7, 10 и 34 или Вспомогательная величина XQ показывает толщину вертикального земельного грунта, вспомогательная величина ZQ показывает толщину горизонтального грунта. Напряжения X,j и Zg генерируются потенциометрами 29 и 25, которые управляются вручную. Напряжение Z подается на потенциометр 26, где оно умножается на постоянную К величину, избираемую вручную, которая соответствует наклону в целом. Все напряжения суммируются и общие суммы затем сравниваются посредством компенсирующих усилителей 7, W и 34. В соответствии с результатами сравнений и настройки рещающей цепи меняется либо положение экскаватора, либо прекращается маятниковое движение, либо изменяются дополнительные напряжения X, Zi и Х на потенциометрах 23, 30 и 36. Решающая цепь моделирующего устройства монтируется таким образом, чтобы можно было корректировать действия вычислительной машины, учитывая фронтальный и боковой наклоны, ровную поверхность, горизонтальную поверхность, а также любую требуемую поверхность и грунт, получаемый в результате подъемного движения. Работа по соединению и управлению рещающей цепи моделирующего устройства, включая определение взаимно связанных действий, гарантируется программным управлением, которое содержит ряд постоянных программ. Выбор программ осуществляется вручную. После запуска программы, программное управление автоматически контролирует последовательность действий и переключает решающие цепи посредством вентилей. Входные сигналы моделирующего рещающего устройства подвергаются такой обработке, что в случае ручного управления экскаватора вентили //, 24, 35 и 31 открываются и компенсирующие усилители 7, 10 и 34 решают уравнения: А,KZ,+X, - X2 0 B,...-.Z, - Z2 0 Ci....Ji 0. Проектируемая решающая цепь монтируется в том случае, когда угол фронтального наклона равен углу бокового наклона. Независимо от дополнительных координат Xi и Zj счетный механизм образуе.т также дополнительные координаты Хп и ZQ, которые пропорциональны размеру грунта, величину которого можно регулировать подобно величине К в произведении /CZ,, в соответствии с требуемым наклоном, после чего в счетное устройство вводится координата екак истинное угловое перемещение экскаватора. Моделирующее устройство обрабатывает величины sins и coss, требуемые при продолжении вычисления для определенной монтажной схемы решающей цепи. Датчик 14 угла б ция датчика, а также функция подсчета угла tg6 осуществляется с помощью сельсина, на валу которого эксценгрически укреплен груз, демпфируемый маслом. Выходное напряжение сельсина пропорционально синусу углового смещения вала. При небольших углах наклона экскаватора, что имеет место в работе, молчно считать, что: tcr6 sin б. где б - отклонен 5е хода экскаватора от горизонтальной поверхности в направлении плоскости, проходящей через несущую стрелу и ось вращения экскаватора. Устройство перемеп1ается под углом таким образом, что движение небольшого груза на валу сельсина осуществляется только в направлении угла 8. Показания sins, cos s и tg6 в моделирующем устройстве умножаются на координату Х-у, а величины Xacose, X2sin е умножаются на величины К. и Ki. которые представляют собой градиент линии фронтального наклона 6i и бокового наклона бо любой поверхности и подготавливаются в счетном устройстве для дальнейшей обработки. Отдельные показания реп,1ающей цепи формируются без учета их истинной полярности. Доиолнения образуются последовательно, а соответствующая полярность выбирается путем изменения сигнала на выходе таким образом, чтобы остановить уравнения, указанные для отдельных усилителей. Уравнения всегда имеют силу в каждом усилителе в соответствии с избранной решаюшей цепью. Для сохранения фронтального наклона, где образование грунта обусловлено подъемным движением, программное управление определяет решающую цепь и последовательность операций таким образом, что экскаватор управляется вручную при его первоначальном положении, где выемка грунта начинается в результате маятникового движения (вращающегося движения) экскаватора. После окончания вращающегося движения, маховик опускается, вентили 31, 12, 35, 31 )i 24 открываются, и компенсирующие усилители 7, 10 и 34 решают уравнения: Л,/С, () +Х,-А%-0 BZZi + Zo -Z2 0 С,Х, - X, 0 Координаты, установленные па ручное управление, не меняются, изменяется фактическое положение маховика. При опускании маховика на одну лопасть происходит вращательное движение и экскавация. Первоначально открытые вентили закрываются и открываются вентили //, 24, 35 и 31. При этом восстанавливается та же решающая цепь и действительны те же уравнения, как и при ручном управлен1 и. Установка равной плоскости происходит параллельно плоскости хода экскаватора. Если грунт образуется путем
операции программным управлением таким образом, что экскаватор устанавливается в исходной позиции и экскавация осуществляется путем поворота.
После окончания поворота следует выемка на одну лопасть, вентили 36, 12, 31 и 28 открыты, усилители 7, 10 и 34 работают так, что выполняются условия следующих уравнений:
Л2KZ, + J, 4- Jo - О
В,....Х,.
Координаты Xj и Zi не меняются, а фактическое положение маховика изменяется. За поворотной выемкой грунта и новой регулировкой осуществляется усовершенствованное движение (подача), как и в случае ручного управления.
Путем открытия вентилей 11, 35 и 31 устанавливается новая величина Х, в то время как величина Z остается неизменной.
Сохранение образования грунта при боковом наклоне происходит почти также, как и при сохранении плоскости параллельно плоскости хода экскаватора. Различие существует только в прекращении маятникового движения на выходе усилителя 34 (до начала выемки грунта): вентиль 35 закрыт, а вентили 33 и 31 открыты. В том случае, когда посредством компенсирующего усилителя 34 происходит выравнивание, применяется следующее уравнение:
СгX - cos е О
Это приводит к остановке маятникового движения и к удлинению несущей стрелы, а также к сохранению плоскости, параллельно поверхности хода.
Механизм сохранения горизонтальной поверхности заключается в том, что образование грунта при удлинении стрелы и рабочий цикл осуществляются таким же образом, как и в случае механизма сохранения поверхности- параллельно поверхности хода экскаватора. Различие в рещающей цепи состоит только в том, что вентиль 21 является постоянно OJTкрытым и усилитель W рещает уравнение:
54.... -Z2 0
Механизм сохранения любой поверхности заключается в том, что образование грунта при удлинении стрелы и рабочий цикл осуществляются таким же образом, как и в случае механизма сохранения плоскости-параллельно поверхности хода. Различие в рещающей цепи состоит только в том, что вентиль 19 постоянно открыт и усилитель 10 рещает уравнение:
BS...ZJ + е + KzXzsin е - Zz О
Механизм сохранения любой поверхности с учетом равнины представляет собой сочетание
метода сохранения горизонтальной поверхности и метода сохранения любой поверхности. Вентили 19 и 21 являются открытыми и усилитель 10 рещает уравнение:
B5....Zi -f + 8 -f + /СД2в1пе -Za 0
Предмет изобретения
Моделирующее устройство для автоматического управления экскаваторами, например роторными, содержащее датчики координат
положения центра ротора, маятниковый механизм и соединенные между собой следящее множительное устройство, сумматоры, вентили, компенсирующие усилители и потенциометры, отличающееся тем, что, с целью повыщения точности и расщиреиия функциональных возможностей, в нем выход датчика одной из координат соединен со входом следящего множительного устройства и через сумматор, компенсирующий усилитель и вентили
подключен ко входу привода подачи стрелы и потенциометру, присоединенному через вентиль, сумматор и другой компенсирующий усилитель ко входу привода маятникового механизма и ко входу сумматора, выход которого подключен ко второму входу сумматора цепи привода подачи стрелы, а второй вход соединен через вентиль с потенциометром; выходы маятникового механизма и датчика отклонения экскаватора соединены с тремя входами следящего множительного устройства, два выхода которого через потенциометры, сумматор и вентиль присоединены ко входу сумматора, присоединенного вторым входом через дополнительный вентиль к третьему выходу следящего множительного устройства и подключенного выходом ко входу сумматора, выход которого через компенсирующий усилитель и вентиль присоединен ко входу привода подъемника несущей стрелы; выход компенсирующего усилителя привода маятникового механизма через клапан и потенциометр присоединен ко второму входу подключенного к нему сумматора, третий вход которого через вентиль и вспомогательный сумматор подключен к одному из выходов следящего множительного устройства, одному из входов сумматора в цепи привода подачи стрелы и выходу потенциометра, вход которого соединен со входом сумматора в цепи привода подъемника несущей стрелы и выходом сумматора, подключенного одним из входов через потенциометр и вентиль к выходу компенсирующего усилителя той же цепи и вторым входом-к цепочке из последовательно включенных вентиля и потенциометра.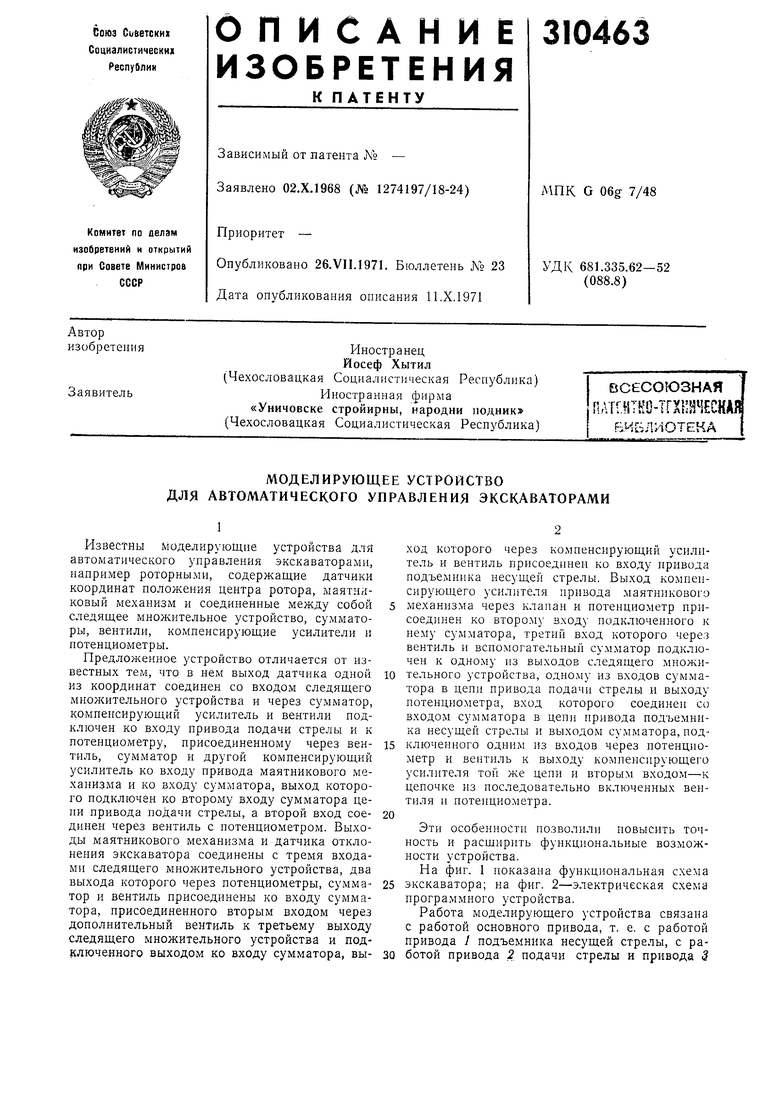
| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГОВОЕ УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ВЗЛЕТАСАМОЛЕТА | 1969 |
|
SU232601A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЯЗКОСТИ жидких СРЕД | 1973 |
|
SU398058A1 |
| БЕСКОНТАКТНАЯ ЕМКОСТНАЯ АВТОНОМНАЯ СИСТЕМА | 1973 |
|
SU363257A1 |
| РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО К ОСЦИЛЛОСКОПУ | 1969 |
|
SU238658A1 |
| КАРДИОТАХОМЕТР | 1972 |
|
SU358809A1 |
| РАЗВЕРТЫВАЮЩЕЕ УСТРОЙСТВО ДЛЯ ОСЦИЛЛОСКОПА | 1969 |
|
SU242268A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПЛЕНКИ | 1970 |
|
SU282195A1 |
| УСТРОЙСТВО для СМЕНЫ ПОЧАТКОВ НА МОТАЛЬНОЙ МАШИНЕ | 1970 |
|
SU265764A1 |
| СИНХРОНИЗИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ВАЛОВ, СОЕДИНЕННЫХ С ПРИВОДАМИ РАЗЛИЧНОЙ МОЩНОСТИ | 1972 |
|
SU324158A1 |
| ПРИВОД КРУГЛОЧУЛОЧНОГО АВТОМАТА | 1971 |
|
SU303795A1 |