Изобретение касается автоматического устройства для наведения .бурильных машин в соответствии с требуемым расположением шпуров.
Известно устройство для автоматического наведения бурильных машин, содержащее датчики, следящее за положением податчика машины и удерживающего его манипулятора, и датчики, задающие программу работы исполнительным органам податчика и манипулятора. Датчики подключены к блоку сравнения, который через усилитель оперативно связан с исполнительными органами (силовыми цилиндрами) податчика и манипулятора.
В предлагаемом устройстве задающие датчики снабжены винтовым, механизмом, имеющим винт переменного щага- и несколько взаимодействующих с ним гаек, расстояние между которыми определяет координаты шпуров, при этом винтовой механизм связан с приводом для его перемещения, представляющим собой винт с гайкой, положение которой определяет уровень нижнего ряда щпуров. В результате этого дости|-ается точная наводка бурильных мап1ин на щпуры независимо от расстояния между ними и высоты обуриваемого забоя. На чертеже представлена схема преялагаеMoio устройства с моделированием координат щпуров активным сопротивлением.
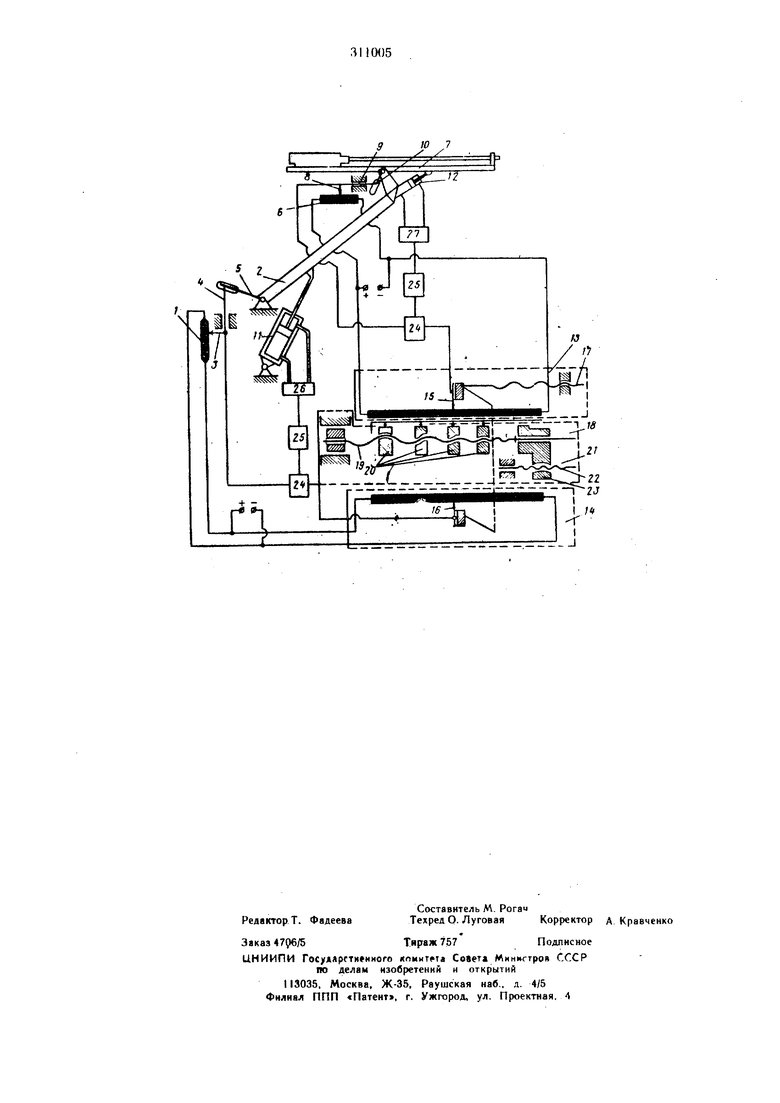
Устройство содержит датчик 1, контролирующий фактическое положение стрелы манипулятора 2, при этом подвижный контакт 3 датчика крепится на ползуне 4, переменхающемся от толкателя 5, который жестко прикреплен к стреле манипулятора. Устройство содержит также датчик 6, контролируюп1ий фактическое положение податчика 7, при этом подвижный контакт 8 этого датчика закреплен на ползуне 9, связанном с толкателем 10, жестко прикрепленным к податчику 7.
Подъем и опускание манипулятора ocynieciвляется исполнительным органом 11 в виде силового цилиндра, а перемещение податчика 7 относительно манипулятора - исполнительным opiaHOM 12 в виде силового цилиндра.
Для задания программы работы исполнительным органом 11 и 12 податчика 7 и манипулятора применены датчики 13 и 14, подвижные контакты 15 и 16 которых могут перемещаться при помощи винта 17. Для введения коррекций в программу работы датчиков 13 и 14 они снабжены винтовым механизмом Г8, имеющим вннт 19 переменного тага н несколько гаек 20 с указателями, взаимодействующих с винтом 19. Расстояние между крайними гайками 0 определяет модель высоты забия. а расстояние между соседними гайками - моВинтовой механизм 18 перемещается при помощи привода 21 в виде винта 22 и гайки 23, которая является моделью уровня нижних шпуров и служит началом отсчета координат шпу{)он по вертикали, т. е. нулевой координатой. Датчики I, б и 13, 14 подключены к своему блоку 24 сравнения, который через усилитель 25 оперативно при помощи электрогидравлических золотников 26 и 27 связан соответственно с исполнительным органом II манипулятора 2 и исполнительным органом 2 податчика 7.
При соответствиазапрограммированной забоя фактически устройство работает следующим образом. Винтом 17 перемешаются контакты 15 и 16 датчиков 13 и 14 до «.овмещения с положением какой-либо гайки 20, соответствук щей запрограммированной координа те шиура. В результате этого появляется рассогласование) мех .ду датчиками 13 и 14 и датчиками t и 6, которое фиксируется блоком 24 сравнения, усиливается усилителем 25 и подается к электрогидравлнческим золотникам 26 и 27, которые перепускают рабочую среду в необходимую полость цилиндров, -s. е, исполнительных органов И и 12.
При несоответствии запрограммированной высоты забоя фактической необходимо увеличить или уменьшить расстояние между крайними гайками 20 пропорционально величине изменения. Эта пропорциональность достигается за счет выполнения винта 19 с переменным шагом.
Для первого вида коррекции, т. е. изменения каждой запрограммированной координаты шпура, кроме нулевой, перемещением контактов 15 и 16 датчиков 13 и 14 стрела манипулятора 2 и подзтчик 7 устанавливаются а обуривание верхнего окон.уривающего шпура с учетом фактической высоты забоя. Затем при
помощи винта 19 перемещаются все гайки 20 до совпадения папожения крайней гайки с положением контактов 15, 16 датчиков 13, 14.
Таким образом, гайки 20 занимают новые положения, которые соответствуют новым координатам шпуров с учетом фактической высоты 1абоя.
Для нторого вида коррекции, т. е. изменения запрограммированной коорЛинаты шпура. в том числе и нулевой, на одну и ту же величину винтовой механизм 18 перемещают с помощью внигга 22 привода 21.
Формула изобретения
Устройство для автоматического наведения бурильных машин в соответствии с требуемым расположением шпуров, содержащее датчики, следящие за положением податчика машины и удерживающего его манипулятора, и дачики, задающие программь работы исполнительным органам податчика и манипулятора, подключенные к сравнения, который через
усилитель оперативно связан с испол{1ительными органами поьввтчИка и манипулятора, отличающееся тем, что, с целью точной наводки бурильных машин независимо от расстояния между шпурами я высоты обуриваемого забоя, задающие датчики снабжены винтовым механизмом, имеющим винт переменного шага и не сколько взаимодействующих с ним гаек, расстояние между которыми определяет координаты fjinypoB, причем Винтовой механизм связан с приводом для его перемещения, представляющим собой винт с гайкой, положение которой определяет уровень нижнего ряда шпуров.
/
| название | год | авторы | номер документа |
|---|---|---|---|
| Буровая каретка | 1977 |
|
SU617589A1 |
| Манипулятор для бурильных машин | 1982 |
|
SU1099066A1 |
| Бурильная установка | 1985 |
|
SU1294986A1 |
| КОМПЛЕКС ДЛЯ ПРОХОДКИ ГОРНЫХ ВЫРАБОТОК | 1998 |
|
RU2153582C2 |
| Шахтная бурильная установка | 1982 |
|
SU1073448A1 |
| Устройство для отвода продуктов разрушения при бурении | 1987 |
|
SU1544968A1 |
| Установка для проведения тоннелей | 1979 |
|
SU840370A1 |
| Устройство для бурения шпуров | 1980 |
|
SU898053A1 |
| ГИДРОПРИВОДНОЙ СТАНОК ДЛЯ БУРЕНИЯ СКВАЖИН | 2008 |
|
RU2378477C1 |
| Устройство для возведения анкерной крепи | 1980 |
|
SU934038A1 |