Изобретение относится к несущим груз приспособлениям к подъемнику, автоматически открывающимся под действием упора, установленного в месте выгругки.
В предлагаемом захвате для мешков, поднимаемых подъемником, зажимание устья мешка проШводйтся при помощи , установленного на поворотном двуплечем рычаге, и поворотной пластины, шарнирно связанной с 11оследним планкой с нескольким11 вырезами с целью регулирования расстояния между роликом и пластиной. Для удерживания захвата в закрытом положении служит крючок с хвостовиком, которым он в месте выгрузки задевает за упор, представляющий собой зубчатую рейку, связанную тросом с концом приемной для мешка полки и выдвигаемую на линию движения упомянутого хвостовика при падении полки. Удаление ynopq с пути хвостовика происходит под действием пружины.
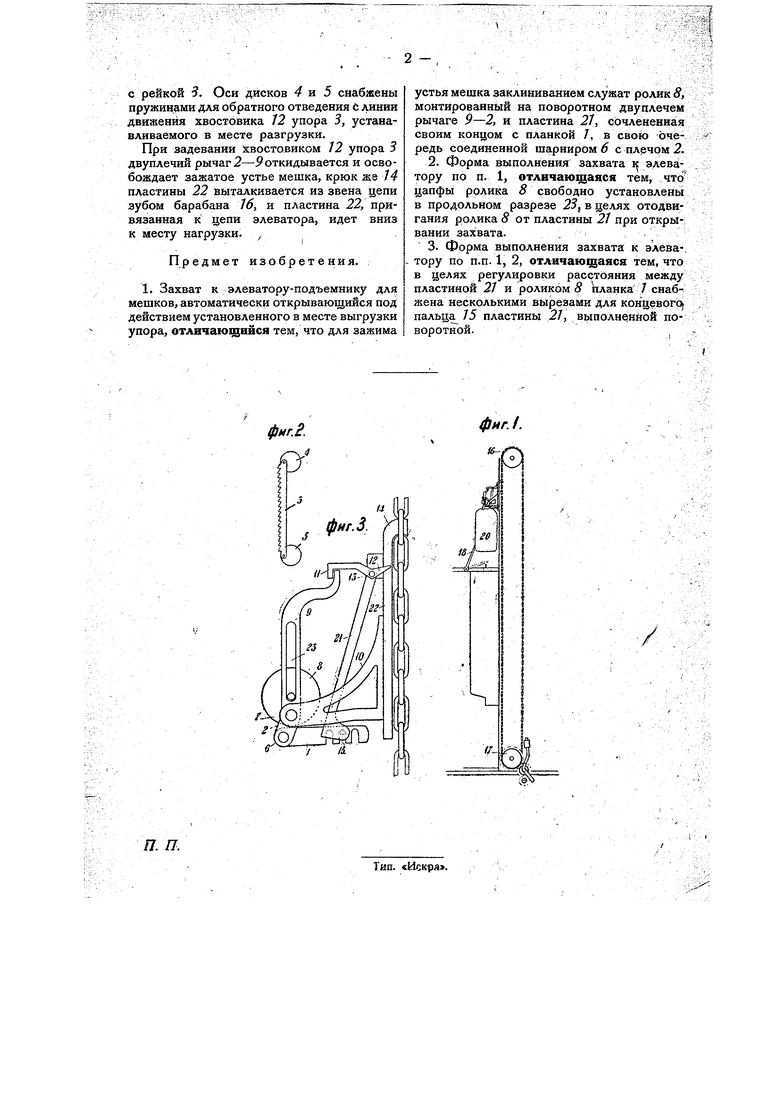
На схематическом чертеже фиг, 1 изображаетЪбщий вид подъемника для мешков; фиг. 2 - вид упора сбоку; фиг. 3 - вид захвата сбоку. .
Предлагаемый захват к элеватору-подъемнику для мешков состоит из навешиваемой крючком 14 пластины 22, несущей
118.
вертикальный кронштейн 10 и горизонтальную ось 13, на который поворотно насажена пластина 21 с концевым пальцем 15 и поворотный крючок //-13-12. Между щеками кронштейна 10, несущего ось 7 двуплечего рычага2-9, помещается ролик 8, цапфы которого свободно установлены в прорезе 23 плеча 9, закрепляемого в вертикальном положении крючком 7/-13-12. Плечо 2 шарниром б связано с планкой 1, снабженной несколькими вырезами для пальца 15 пластины 21. Устье мешка 20 закладывается между роликом 8 и пластиной 21 и ими зажимается при подъеме двуплечего рычага 2-9; в виду различной толщины ткани мешка палец 15 может закладываться в различные вырезы планки /.
При подъеме мешка 20 элеватором 16-17 пластина 22 скользит по установленным рядом с цепью элеватора брускам. Раскрывание захвата производится при помощи упора, выполненного в виде зубчатой рейки , шарнирно соединенной с поворотными дисками и 5 и выдвигаемой на линию движения хвостовика 12 крючка при падении в исходное положение 19 приемной для мешка поворотной полки 18, конец которой связан тросом
с рейкой 5. Оси дисков 4 vi 5 снабжены пружинами для обратного отведения с линии движения хвостовика 12 упора 3, устанавливаемого в месте разгрузки.
При задевании хвостовиком 12 упора 5 двуплечий рычаг2- Роткидывается и освобождает зажатое устье мешка, крюк же 14 пластины 22 выталкивается из звена цепи зубом барабана 16, и пластина 22, привязанная к цепи элеватора, идет вниз к месту нагрузки.
Предмет изобретения.
1. Захват к элеватору-подъемнику для мешков, автоматически открывающийся под действием установленного в месте выгрузки упора, отличающийся тем, что для зажима
устья мешка заклиниванием служат ролик 8 монтированнь1Й на поворотном двуплечем рычаге 9-2, и пластина 21, сочлененная своим концом с планкой /, в свою очередь соединенной шарниром б с плрчом 2.
2.Форма выполнения захвата к элева тору по п. 1, отличающаяся тем, что цапфы ролика 8 свободно установлены в продольном разрезе 25, в целях отодвигания ролика 6 от пластины 21 при открывании захвата.
3.Форма выполнение захвата к элева-. тору по п.п. 1, 2, отличающаяся тем, что в целях регулировки расстояния между пластиной 21 и роликом планка 7 снабжена несколькими вырезами для пальца./5 пластины 2/, выполне нной поворотйой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для обмотки роторов электрических машин | 1972 |
|
SU540582A3 |
| Буферное устройство для погонялки ткацкого станка | 1940 |
|
SU63393A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗАМОК ДЛЯ ДВЕРИ ШАХТЫ ПОДЪЕМНИКА | 1926 |
|
SU28300A1 |
| Станок для формирования деревянных ободьев колес | 1951 |
|
SU96821A1 |
| УСТАНОВКА ДЛЯ ПРИЕМА, СКЛАДИРОВАНИЯ И ВЫДАЧИ СКВАЖИННЫХ ТРУБ И ШТАНГ ПРИ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЯХ | 2000 |
|
RU2170325C1 |
| Машина для сшивания сетного полотна | 1976 |
|
SU820292A1 |
| МАЛОГАБАРИТНАЯ ХЛОПКОПРЯДИЛЬНАЯ МАШИНА ДЛЯ ВЫРАБОТКИ ПРЯЖИ ИЗ ЛЕНТЫ | 1952 |
|
SU98484A1 |
| ПРИСПОСОБЛЕНИЕ К ПОДЪЕМНИКАМ ДЛЯ АВТОМАТИЧЕСКОЙ РАЗГРУЗКИ | 1928 |
|
SU16835A1 |
| УСТРОЙСТВО для ОБВЯЗКИ ШТУЧНЫХ ПРЕДМЕТОВ | 1972 |
|
SU351756A1 |
| Жгутоформирующий орган машины для сшивания сетных полотен | 1981 |
|
SU1318620A1 |
фмг. I.
к

