Изобретение относится к области измерительной техники и предназначено для преобразования угла поворота вала в дискретноаналоговую величину напряжения, пропорциональную углу поворота (аналоговое изменение сигнала в пределах единицы дискретности).
В известных бесконтактных датчиках изменение магнитного потока при повороте ротора датчика относительно статора преобразовывается в изменение индуктивности или величины наводимой э.д. с. в обмотке зубцаи далее считывается при помощи либо трансформаторного выхода, либо мостовых или компенсационных схем.
В магнитомодуляционных преобразователях угла поворота в код чувствительные элементы выполняются в виде магнитных усилителей, управляемых внешним магнитным полем, перемещение которого осуществляется при повороте входного вала.
Однако такие устройства обладают невысокой разрещающей способностью, ограниченной 7-9 разрядами; сложностью считывающих устройств, к которым относятся устройства с трансформаторным выходом, с трансформаторным и индуктивным съемом сигналов; сложностью конструктивного выполнения и большими размерами.
Описываемый магнитный датчик отличается от известных тем, что в нем ротор и статор выполнены из магнитомягкого материала с расположенными на них наборами чередующихся пластин из магнитомягкого и немагнитного материалов, а в качестве чувствительного элемента применен датчик Холла, расположенный в пазу основания статора, выполненного в виде постоянного магнита.
Это позволяет повысить разрешающую способность датчика, увеличить его чувствительность и уменьшить габариты.
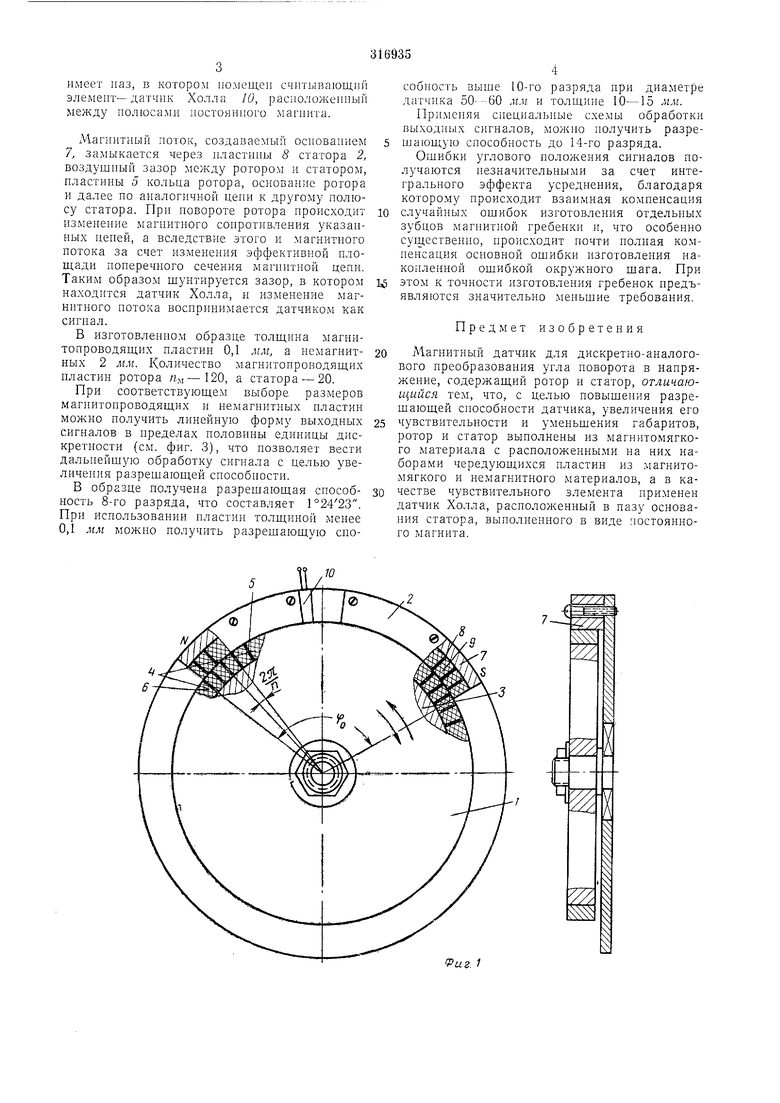
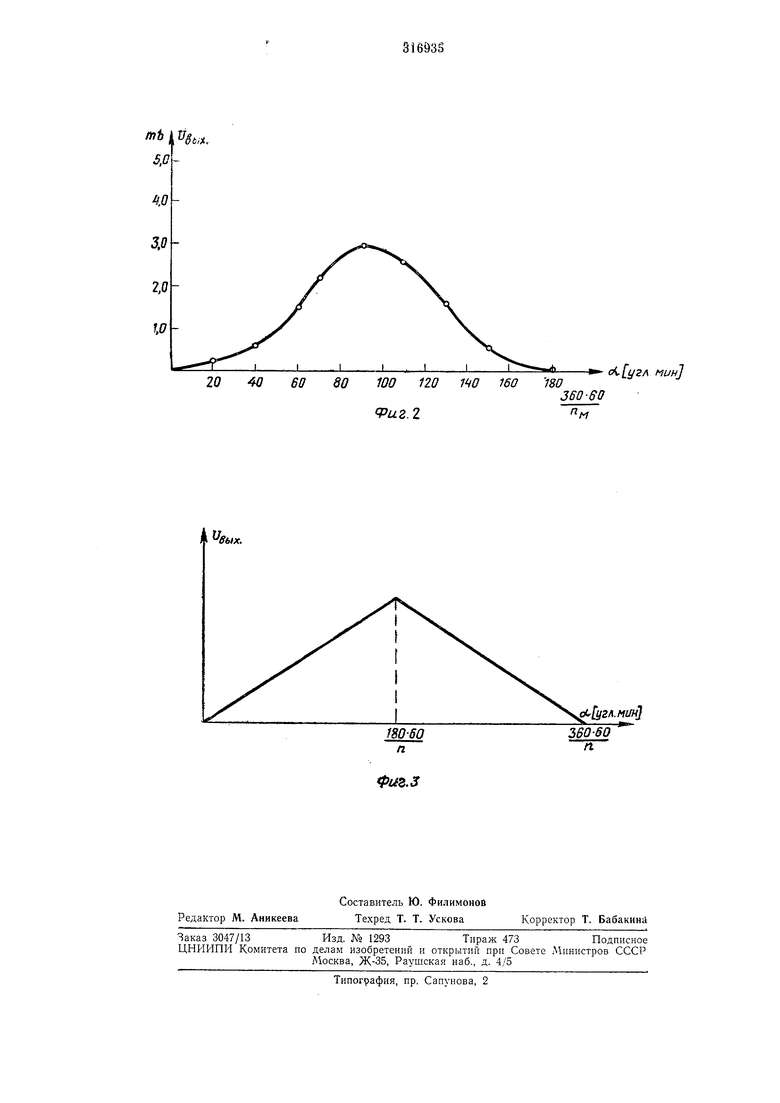
На фиг. 1 показан датчик в общем виде; на фиг. 2 - экспериментальная форма сигнаЛОБ датчика; на фиг. 3 - линейная форма выходных сигналов.
Магнитный датчик состоит из ротора 1 и статора 2. Ротор имеет основание 3, которое выполняется из магнитомягкого материала.
По наружному диаметру основания ротора посажено кольцо 4, состоящее из пластин 5 магнитомягкого и 6 немагнитного материалов, которые чередуются между собой. Статор 2 имеет основание 7, представляющее собой постоянный магнит, на котором закрепляются чередующиеся пластины 8 из магнитомягкого и 9 немагнитного материалов, набранные аналогично кольцу 4. Конструкци статора может быть выполнена в виде секто имеет паз, в котором ио.мещеп считывающий элемент-датчик Холла 10, расиоложеииый между полюсами постояниого магиита. Магпитный поток, создаваемый осиовапием 7, замыкается через иластииы 8 статора 2, Боздушиый зазор между ротором и статором, пластины 5 кольца ротора, основаппе ротора и далее по аналогичной цепи к другому полюсу статора. При повороте ротора происходит изменение магнитного соиротивлени указанных цепей, а вследствие этого и магнитного потока за счет изменения эффективной площади поперечного сечения магнитной цепи. Таким образом шунтируется зазор, в котором находится датчик Холла, н изменение .магнитного потока воспринимается датчиком как сигнал. В изготовленном образце толщина магнитопроводящих пластин 0,1 мм, а немагнитных 2 мм. Количество магнитопроводящих пластин ротора «м-120, а статора--20. При соответствующем выборе размеров магнитопроводящих и немагнитных пластин можно получить линейную форму выходных сигналов в пределах половины единицы дискретности (см. фиг. 3), что позволяет вести дальнейшую обработку сигнала с целью увеличения разрешающей снособности. В образце получена разрешающая способность 8-го разряда, что составляет 1°2423. При использовании пластин толщиной менее 0,1 мм можно получить разрешающую снособность выше 10-го разряда при диа.метре датчика 50--60 мм и толщине 10-15 мм. При.меняя снециальные схемы обработки выходных сигналов, можно получить разрешающую способность до 14-го разряда. Ошибки углового ноложения сигналов получаются незначительными за счет интегрального эффекта усреднения, благодаря которому происходит взаимная компенсация случайных ошибок изготовления отдельных зубцов магнитной гребенкн и, что особенно существенно, нроис.ходит почти полная компенсация основной ошибки изготовления накопленной ошибкой окружного шага. При этом к точности изготовления гребенок предъявляются значительно меньшие требования. Предмет изобретения Магнитный датчик для дискретно-аналогового преобразования угла поворота в напряжение, содержащий ротор и статор, отличающийся тем, что, с целью повышепия разрешающей снособности датчика, увеличения его чувствительности и уменьшения габаритов, ротор и статор выполнены из магнитомягкого материала с расположенными на них наборами чередующихся пластин из .магнитомягкого и немагнитного материалов, а в качестве чувствительного элемента применен датчик Холла, расположенный в назу основания статора, вынолненного в виде постоянного магнита. 40 60 100 по 140 160 (Риг.2 (i/гл мин 360-60
| название | год | авторы | номер документа |
|---|---|---|---|
| ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 1998 |
|
RU2143169C1 |
| Преобразователь угла поворота вала в код | 1981 |
|
SU966720A1 |
| Бесконтактный преобразователь угла | 1976 |
|
SU571857A1 |
| Электромеханический преобразователь вентильного электродвигателя | 1987 |
|
SU1626308A1 |
| ОПОРНО-ПРИВОДНОЕ УСТРОЙСТВО | 1999 |
|
RU2193703C2 |
| МНОГОРАЗРЯДНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА В КОД | 1973 |
|
SU382125A1 |
| ИНДУКТИВНЫЙ ДАТЧИК ПОЛОЖЕНИЯ РОТОРА БЕСКОЛЛЕКТОРНОГО ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2000 |
|
RU2176846C1 |
| ТРАНСФОРМАТОРНЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1971 |
|
SU425276A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2007 |
|
RU2348098C1 |
| Электромеханический преобразователь моментного вентильного электродвигателя | 1989 |
|
SU1702493A1 |
Ь11угл.ман
Фиг.з
