Изобретение относится к устройствам, предназначенным для механизации и автоматизации производственных процессов в опасных для человека зонах и может быть -np-HMeHeHO в дистанционных манипуляторах.
Известны следящие системы с отражением усилия, содержащие канал слежения с датчиками угла и скорости на задающей и исполнительной осях, которые соединены со входом усилителя, подключенного К, приводному элементу. Система также содержит канал отражения усилия с блоком выделения; сигнала нагрузки, соединенным датчиком скорости исполнительной оси и через модель объекта - с выходом усилителя канала слежения. При этом выход блока вьтделения .сигнала нагрузки через задатчик уровня сигнала связан с усилителем, один из выходов которого через задатчик и ограничитель момента соединен с прив-одным элементом.
Предлагаемая система отличается от известных тем, что она содержит стопорный механизм на задающей оси, датчик направлеН.ИЯ движения задающей оси, датчик фазы угла рассогласования, соединенный С усИлителем канала слежения, и блок сравнения,связанный с обоими дополнительными датчиками, причем усилитель канала отражения усилия, выполненный релейным, через блок сравнения соединен со стопорным - MexaHHS,-MOM. Это позволяет уменьшить утомляемость оператора.
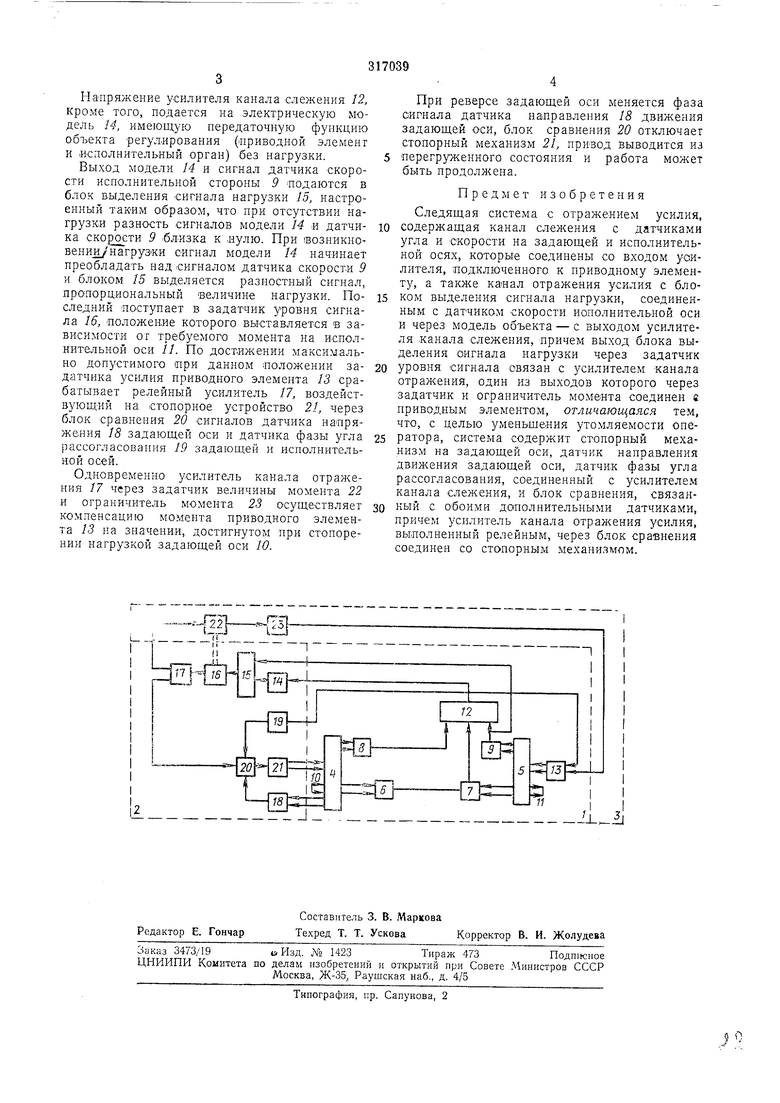
На чертеже приведена блок-схема предлагаемой системы.
Следящая система состоит из канала слеж:ения 1, канала отражения усилия 2 и устройства ограничения момента 5.
Канал слежения I содержит редукторы 4 и 5, датчики угла б и 7, датчики скорости 8 и 9 поворота задающей 10 « исполнительной 11 осей, усилитель 12 и приводной элемент 13.
Канал отражения усилия 2 содержит электрическую модель объекта 14, блок выделения сигнала, нагрузки 15, задатчик уровня сигнала /&, усилитель канала отражения 17, датчик направления движения задающей оси 18. датчик фазы угла рассогласования исполнительной и задающей осей 19, блок сравнения 20 и стопорный механизм 21.
Устройство ограничения момента содержит задатчик величины момента 22 и ограничитель момента 23 приводного элемента 13.
Работа следящей системы происходит следующим образом. Сигнал рассогласования задающей 10 и исполнительной 11 осей, преобразованный в напрян ение датчика угла 7, поступает в усилитель канала слежения 12, управляющий приводным элементом 13. Сигналы датчиков скорости S и 9 задающей и исполнительной сторон используются для формирования и стабилизации системы.
Напряжение усилителя канала слежения 12, кроме того, подается на электрическую модель 14, имеющую передаточную функцию объекта регул-ирования {Приводной элемент и исполнительный орган) без нагрузки.
Выход модели 14 и сигнал датчика скорости исполнительной стороны 9 Подаются в блок выделения сигнала нагрузки 15, настроенный таким образом, что при отсутствии нагрузки разность сигналов модели 14 и датчика ско|юсти 9 близка к яулю. При возникновенииунагрузки сигнал модели 14 начинает преобладать над сигналом датчика скорости 9 и блоком 15 выделяется разностный сигнал, пропорциональный величине нагрузки. Последний поступает в задатчик уровня сигнала 16, положение которого выставляется в зависимости от требуемого момента на исполнительной оси //. По достижении максимально допустимого при данном положении задатчика усилия приводного элемента 13 срабатывает релейный усилитель 17, воздействующий на стопорное устройство 21, через блок сравнения 20 сигналов датчика напряжения 18 задающей оси и датчика фазы угла рассогласования 19 задающей и исполнительной осей.
Одновременно усилитель канала отражения 17 через задатчик величины момента 22 и ограничитель момента 23 осуществляет компенсацию момента приводного элемента 13 на значении, достигнутом при стопорении нагрузкой задающей оси 10.
При реверсе задающей оси меняется фаза сигнала датчика направления 18 движения задающей оси, блок сравнения 20 отключает стопорный механизм 21, выводится из 5 перегруженного состояния и работа может быть продолжена.
Предмет изобретения
Следящая система с отражением усилия,
0 содержащая канал слежения с датчиками угла и скорости на задающей и исполнительной осях, которые соединены со входом усилителя, подключенного к приводному элементу, а также канал отражения усилия с блоком выделения сигнала нагрузки, соединенным с датчиком скорости исполнительной оси и через модель объекта - с выходом усилителя -канала слежения, причем выход блока выделения сигнала нагрузки через задатчкк
0 уровня сигнала связан с усилителем канала отражения, один из выходов которого через задатчик и ограничитель момента соединен 4 приводным элементом, отличающаяся тем, что, с целью уменьще«ия утомляемости оператора, система содержит стопорный механизм на задающей оси, датчик направления движения задающей оси, датчик фазы угла рассогласования, соединенный с усилителем канала слежения, и блок сравнения, связанный с обоими дополнительными датчиками, причем усилитель канала отражения усилия, выполненный релейным, через блок сравнения соединен со стопорным механизмом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2234117C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2006 |
|
RU2302030C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2005 |
|
RU2293366C1 |
| Устройство управления гелиостатом | 1983 |
|
SU1291925A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА УГЛОВОЙ СТАБИЛИЗАЦИИ НЕСТАЦИОНАРНОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2653409C1 |
| Устройство автоматического управления скоростью движения рудничного электровоза | 1977 |
|
SU929473A1 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
| Устройство автоматического управления выемочной машиной | 1977 |
|
SU750065A1 |
