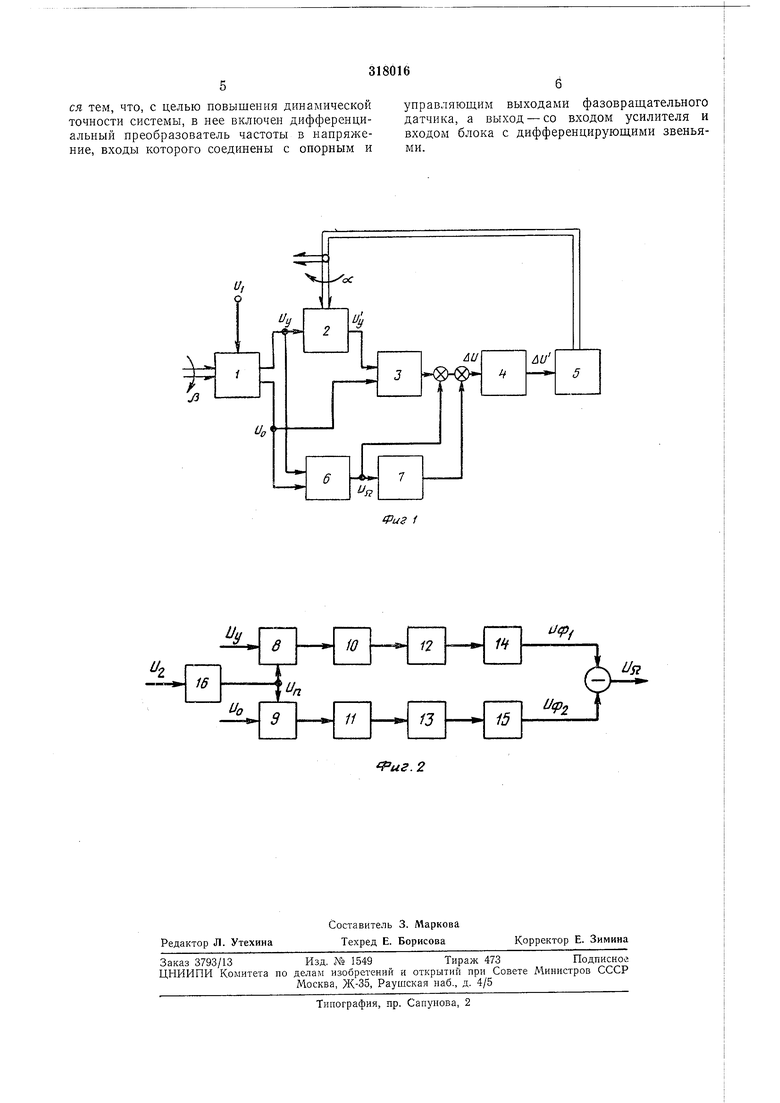
Изобретение относится к системам автоматического управления. Известны фазовые следяш,ие системы, содержащие фазовращательные датчик и приемник, соединенные с фазовым детектором, нодключенным через усилитель к исполнительному двигателю, и блок с дифференцирующими звеньями. Предлагаемая система отличается тем, что в нее включен дифференциальный преобразователь частоты в напряжение, входы которого соединены с опорным и управляющим выходами фазовращательного датчика, а выход - со входом усилителя и входом блока с дифференцирующими звеньями. Это повыщает динамическую точность системы. На фиг. 1 представлена блок-схема фазовой следящей системы с комбинированным управлением на фиг. 2 - блок-схема дифференциального преобразователя частоты в напряжение. Следящая система содержит фазовращательные датчик } и нриемник 2, фазовый детектор 3, усилитель 4, исполнительный двигатель 5, дифференциальный преобразователь частоты в напряжение 6 и блок с дифференцирующими звеньями 7. состоит из ключевых модуляторов 5 и Р, дифференцирующих цепочек 10 и 11, выпрямите:лей 12 и 13, фильтров 14 и 15 и источник питания 16. Рассмотрим принцип действия устройства, вырабатывающего электрический сигнал, прс иорциональный скорости вращения командной оси, состоящего из фазовращательного датчр:ка 1 и преобразователя 6. При вращении командной оси датчика со скоростью Jti его выходные напряжения раиныЦ, t/уи sin К-f ) + Ро иUo Uo,,,-s,.,(р где ф - начальный фазовый сдвиг между управляющим и опорным напряжениями;Ly - управляющее напряжение; Uo - опорное напряжение фазовращательного датчика; Wo - угловая частота опорного напряжения фазовращательного датчика; я - угловая частота, пропорциональная скорости вращения входного вала и равная
где QI - скорость вращения входного вала; Кэ.р - коэффициент электрической редукции фазовращательного датчика (цри иснользовании датчиков без электрической редукции /Сэ.).
Эти напряжения подаются на коммутирующие входы модуляторов 5 н 9, управляющие входы которых подключены к одному стабилизированному источнику питания постоянного тока 16. Модуляторы формируют напряжения прямоугольной формы с частотой, равной (о)о + Й) и соо- Напряжения прямоугольной формы дифференцируются дифференцирующими цепочками 10 и 11, выпрямляются выпрямителями 12 и 13 и сглаживаются фильтрами 14 и 15. Выходные напряжения постоянного тока фильтров , и U, пропорциональны частоте напряжений (7у н UQ
Цф, : К, («о + И)(3)
Ф.-.«„,(4)
где К и KZ - коэффициенты проиорциональ- 25 ности. Вычитая из напряжения ф напряжение С/ф. при , получим и,иф,-иф, К.(5) Следовательно, выходное напряжение дифференциального преобразователя изменяется пропорционально скорости вращения входного вала. Можно показать, что передаточная функция дифференциального преобразователя частоты в напряжение, изображенного на фиг. 2, равна W..n(P) р(Р) (Гэ.ф,Я + 1)(7э.ф.РЧ-1) где Кч.и - коэффициент передачи преобразователя, равный /Сф-ьГ 9// т/- и Дч.п - L рад где ф - коэффициент передачи двухзвенного фильтра 16, (15); т - постоянная времени дифференцирующей цепочки 10, 11, равная b - коэффициент, зависящий от соотнощения постоянной времени т и частоты шо (можно показать, что при 1 т --&л: 1,7) Тэ.ф,; Гэ.ф,эквивалентные постоянные времени двухзвенного фильтра 14, 15. На практике опорное и управляющее напряжения фазовращательного датчика имеют значительный уровень частотных щумов, обусловленных, например, неравномерностью вращения синхронного двигателя в емкостном фазовращателе с электрической редукцией или нестабильностью частоты напряжения питания фазовращательного датчика, что может привести к неудовлетворительной работе следящей системы.
Описанный дифференциальный частотный преобразователь позволяет исключить влияние частотных щумов и нестабильности частоты напряжения датчика на работу системы. Действительно, пусть выходные напряжения фильтров 14 и 15 равны:
f/Ф. (i К + + И (О+И ( ;уф /с,к + д«(о + й (01,
Асо(/)-нестабильность частоты напряжения питания фазовращательного датчика;
Q(t)-частотный щум фазовращательиого датчика.
Вычитая из напряжения t/ф,
напряжение Иф, при Ki , получим
Us KQ(t}, т. е. выходное напряжение дифференциального частотного преобразователя изменяется пропорционально только скорости вращения входного вала. Система работает следующим образом. В исходном состоянии фазовращательные датчик 1 и приемник 2 находятся в согласованном положении. При повороте ротора датчика на угол р фаза t/y и f/y (выходное напряжение фазовращательного приемника) сдвигается относительно фазы опорного напряжения f/o на угол (э.рР (в случае использования фазовращательного датчика без электрической редукции /Сэ.). При этом на выходе фазового детектора 3 и усилителя 4 возникает напряжение рассогласования At/ и ДУ и двигатель 5 поворачивает ротор приемника на угол .рр (или а Р). Если входную ось датчика вращать со скоростью Qj, то на выходе дифференциального частотного преобразователя возникает сигнал Ua , пропорциональный скорости вращения командного вала. Этот сигнал непосредственно и через дифференцирующие звенья 7 суммируется с выходным напряжением фазового детектора, пропорциональным углу рассогласования системы и в соответствии с принципами комбинированного управления создаются условия для компенсации динамической ощибки системы. Предмет изобретения Фазовая следящая система с комбинированным управлением, содержащая фазовращательные датчик и приемник, соединенные с фазовым детектором, подключенным через усилитель к исполнительному двигателю, и блок с дифференцирующими звеньями, выход которого связан со входом усилителя, отличающая5ся тем, что, с целью повышения динамической точности системы, в нее включен дифференциальный преобразователь частоты в напряжение, входы которого соединены с опорным и 6 управляющим выходами фазовращательного датчика, а выход - со входом усилителя и входом блока с дифференцирующими звеньями.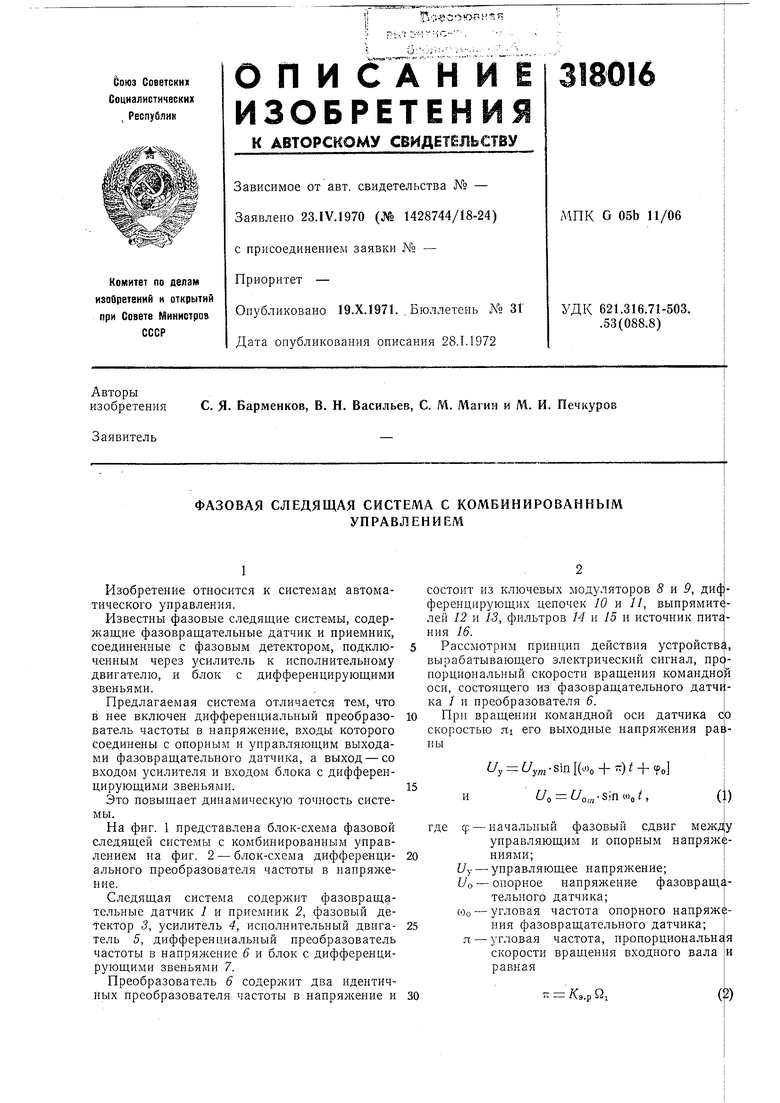

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для преобразования угла поворота вала в код | 1974 |
|
SU610148A1 |
| Устройство для задания угла поворота | 1979 |
|
SU849269A1 |
| Устройство для измерения вертикальных профилей гидрологических параметров морской воды | 1980 |
|
SU935769A1 |
| Фазовая следящая система | 1975 |
|
SU543973A1 |
| ФАЗОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU407276A1 |
| ФОТОКОПИРОВАЛЬНАЯ ДВУХКАНАЛЬНАЯ СИСТЕМАУПРАВЛЕНИЯ | 1969 |
|
SU253543A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 1973 |
|
SU392391A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ВРАЩЕНИЯ ПЛОСКОСТИ ПОЛЯРИЗАЦИИ ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ И ФОТОЭЛЕКТРИЧЕСКИЙ ПОЛЯРИМЕТР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2088896C1 |
| ДАТЧИК ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА МАШИНЫ ПЕРЕМЕННОГО ТОКА | 1994 |
|
RU2085953C1 |
| Следящий фильтр-демодулятор | 1980 |
|
SU1020970A1 |
Un
Utp
иг.2
