1
Изобретение относится к области автоматики и телемеханики и может быть использовано для точной передачи угла поворота -вала.
Известна фазовая следящая система, содержащая фазовращающий датчик, первый выход которого через первый усилитель а второй выход через последовательно соединенные второй усилитель и фазовращающий приемник подключены к фазовому дискриминатору, выход которого через последовательно соединенные третий усилитель и двигатель подключен к фазовращающему приемнику.
Предлагаемое изобретение позволяет добиться высокой точности работы следящей системы более простыми средствами.
Это достигается тем, что в обратные связи первого и второго усилителей включены частотозависимые четырехполюсники.
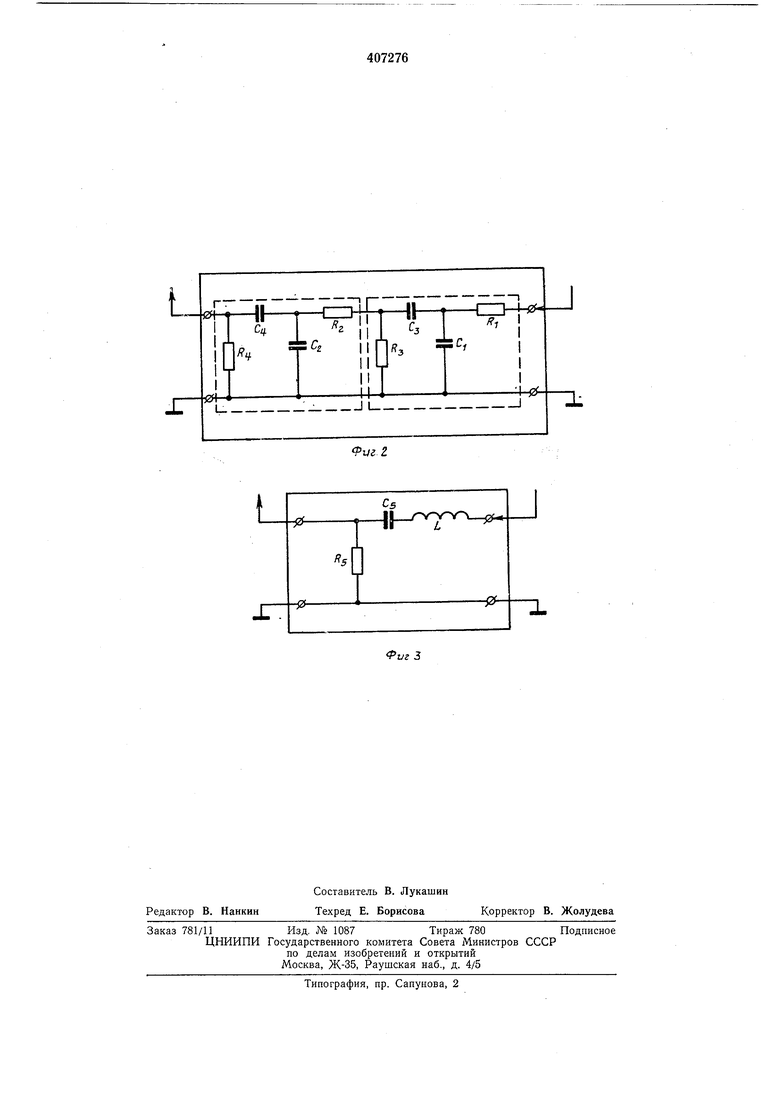
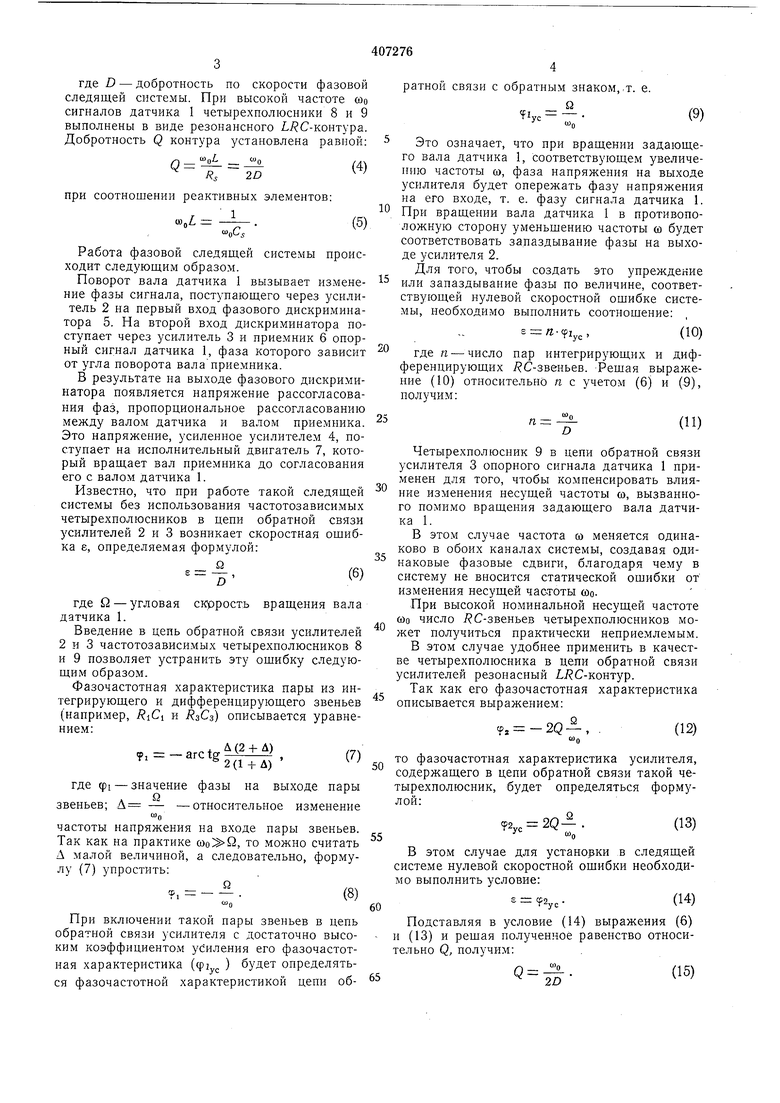
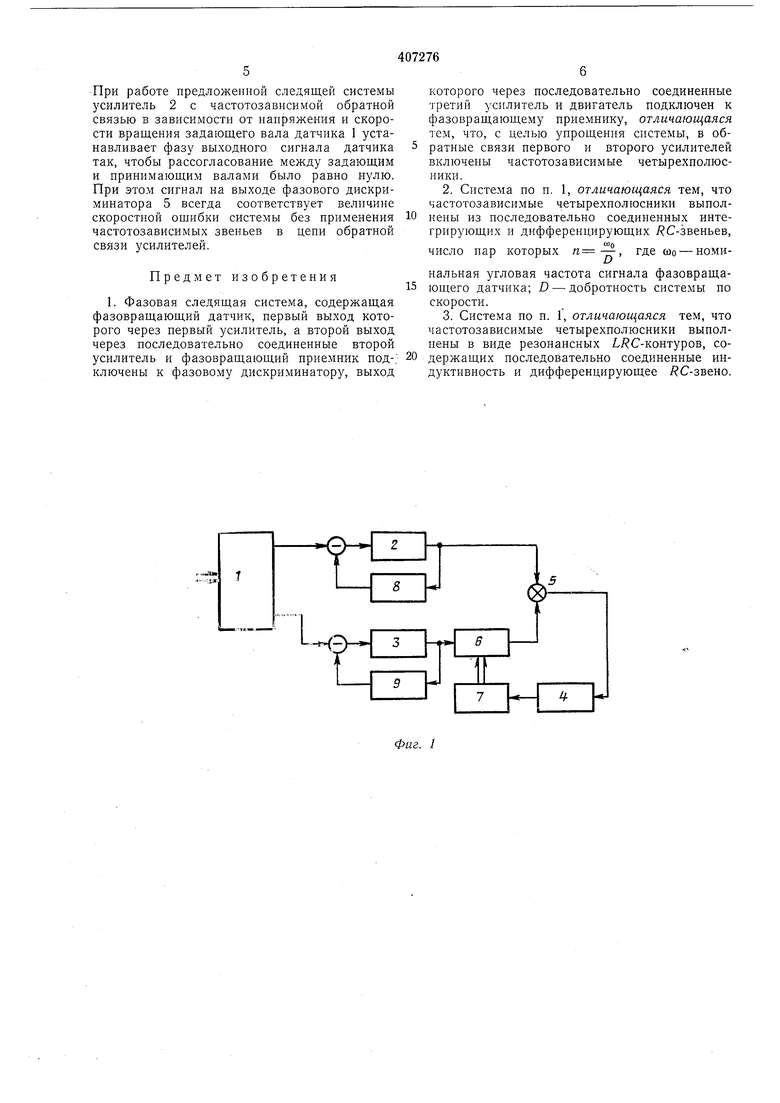
На фиг. 1 представлена блок-схема фазовой следящей системы; на фиг. 2 и 3 - принципиальные схемы частотозависимых четырехполюсников.
Следящая система содержит фазовращающий датчик 1, усилители 2, 3 и 4, фазовый дискриминатор б, фазовращающий приемник 6, двигатель 7, частотозависимые четырехполюсники 8 и 9.
Четырехполюсник, представленный на фиг. 2, содержит две иары последовательно соединенных интегрирующих и дифференцирующих / С-звеньев, причем интегрирующие звенья .составлены из резисторов Ri, Rz и конденсаторов Сь Cz, а дифференцирующие звенья - из резисторов з. 4 и конденсаторов Сз. Сд.
Четырехполюсник, представленный на фиг. 3, содержит последовательно соединенные индуктивность L и дифференцирующее звено, состоящее из резистора Rs и конденсатора Сб.
При низкой частоте сигналов датчика 1 четырехполюсники выполняются в виде последовательно включенных интегрирующих и дифференцирующих С-звеньев.
Из условия получения нулевого фазового сдвига в цепи обратной связи усилителей 2 и 3 при номинальной угловой частоте соо сигналов датчика 1 постоянные времени звеньев установлены равными, т. е. выполнено условие
R,C, Rf, /,С, R,C, . (1)
0
с целью развязки звеньев между собой выполнено соотношение:
R 4.(2)
Число пар п интегрирующих и дифференцирующих звеньев установлено равным:
п ,(3)
о D где D - добротность по скорости фазовой следящей системы. При высокой частоте шо сигналов датчика 1 четырехполюсники 8 и 9 выполнены в виде резонансного L C-контура. Добротность Q контура установлена равной; Q oL шр при соотношении реактивных элементов: Работа фазовой следящей системы происходит следующим образом. Поворот вала датчика 1 вызывает изменение фазы сигнала, поступающего через усилитель 2 на первый вход фазового дискриминатора 5. На второй вход дискриминатора поступает через усилитель 3 и приемник 6 опорный сигнал датчика 1, фаза которого зависит от утла поворота вала приемника. В результате на выходе фазового дискриминатора появляется напряжение рассогласования фаз, пропорциональное рассогласованию между валом датчика и валом приемника. Это напряжение, усиленное усилителем 4, поступает на исполнительный двигатель 7, который вращает вал приемника до согласования его с валом датчика 1. Известно, что при работе такой следящей системы без использования частотозависимых четырехполюсников в цепи обратной связи усилителей 2 и 3 возникает скоростная ощибка е, определяемая формулой: и/с е--,(6) где Q - угловая скорость вращения вала датчика 1. Введение в цепь обратной связи усилителей 2 и 3 частотозависимых четырехполюсников 8 и 9 позволяет устранить эту ощибку следующим образом. Фазочастотная характеристика пары из интегрирующего и дифференцирующего звеньев (например, и ) описывается уравнением: . Д (2 -ь Д) Ф, - arc tg , 2(1 + Д) где ф1 - значение фазы на выходе пары звеньев; Д - -относительное изменение частоты напряжения на входе пары звеньев. Так как на практике , то можно считать Д малой величиной, а следовательно, формулу (7) упростить: Т. - - - .(8) при включении такой пары звеньев в цепь обратной связи усилителя с достаточно высоким коэффициентом усиления его фазочастотная характеристика (ф; ) будет определяться фазочастотной характеристикой цепи обратной связи с обратным знаком,-т. е. lyc Это означает, что при вращении задающего вала датчика 1, соответствующем увеличению частоты ci), фаза напряжения на выходе усилителя будет опережать фазу напряжения на его входе, т. е. фазу сигнала датчика 1. При вращении вала датчика 1 в противоположную сторону уменьщению частоты со будет соответствовать запаздывание фазы на выходе усилителя 2. Для того, чтобы создать это упреждение или запаздывание фазы но величине, соответствующей нулевой скоростной ошибке системы, необходимо выполнить соотношение: - ,,(10) где п - число пар интегрирующих и дифференцирующих RC-зъеньев. Решая выражение (10) относительно п с учетом (6) и (9), получим: Четырехполюсник 9 в цепи обратной связи усилителя 3 опорного сигнала датчика 1 применен для того, чтобы компенсировать влияние изменения несущей частоты ю, вызванного помимо вращения задающего вала датчика 1. В этом случае частота со меняется одинаково в обоих каналах системы, создавая одинаковые фазовые сдвиги, благодаря чему в систему не вносится статической ошибки от изменения несущей частоты сооПри высокой номинальной несущей частоте соо число / С-звеньев четырехполюсников может получиться практически неприемлемым. В этом случае удобнее применить в качестве четырехполюсника в цепи обратной связи усилителей резонасный L/ C-контур. Так как его фазочастотная характеристика описывается выражением: cp, -2Q-, . ТО фазочастотная характеристика усилителя, содержащего в цепи обратной связи такой четырехполюсник, будет определяться формулой:p2y, 2Q-. -ш« В этом случае для установки в следящей системе нулевой скоростной ощибки необходимо выполнить условие: S-92..-(14) Подставляя в условие (14) выражения (6) и (13) и решая полученное равенство относительно Q, получим: Q Ji.(15)
При работе предложенной следящей системы усилитель 2 с частотозависимой обратной связью в зависимости от напряжения и скорости вращения задающего вала датчика 1 устанавливает фазу выходного, сигнала датчика так, чтобы рассогласование между задающим и принимающим валами было равно нулю. При этом сигнал на выходе фазового дискриминатора 5 всегда соответствует величине скоростной ошибки системы без применения частотозависимых звеньев в цепи обратной связи усилителей.
Предмет изобретения
1. Фазовая следящая система, содержащая фазовращающий датчик, первый выход которого через нервый усилитель, а второй выход через последовательно соединенные второй усилитель и фазовращающий приемник под-; ключены к фазовому дискриминатору, выход
которого через последовательно соединенные третий усилитель и двигатель подключен к фазовращающему приемнику, отличающаяся тем, что, с целью упрощения системы, в обратные связи первого и второго усилителей включены частотозависимые четырехполюсники.
2.Система по п. 1, отличающаяся тем, что частотозависимые четырехполюсники выполнены из последовательно соединенных интегрирующих и дифференцирующих У С-звеньев,
™о
ЧИСЛО пар которых , где соо - номинальная угловая частота сигнала фазовращающего датчика; D - добротность системы по скорости.
3.Система по п. Г, отличающаяся тем, что частотозависимые четырехполюсники выполнены в виде резонансных L C-контуров, содержащих последовательно соединенные индуктивность и дифференцирующее / С-звено.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления двигателем главного привода стана холодной прокатки труб | 1984 |
|
SU1205953A1 |
| Фазовая следящая система | 1974 |
|
SU552587A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1973 |
|
SU366454A1 |
| ИЗМЕРИТЕЛЬ АМПЛИТУДНО-ЧАСТОТНЫХ И ФАЗО- ЧАСТОТНЫХ ХАРАКТЕРИСТИК ЧЕТЫРЕХПОЛЮСНИКОВ | 1968 |
|
SU212362A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| УСТРОЙСТВО для КОРРЕКЦИИ ФАЗОЧАСТОТНЫХ ХАРАКТЕРИСТИК КАНАЛОВ СВЯЗИ | 1971 |
|
SU300960A1 |
| Устройство автоматического управления приводами механизмов стана холодной прокатки труб | 1984 |
|
SU1210930A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ ВЛАЖНОСТИ | 1973 |
|
SU392391A1 |
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
| СПОСОБ НАСТРОЙКИ ФАЗОВРАЩАТЕЛЯ | 1970 |
|
SU273267A1 |