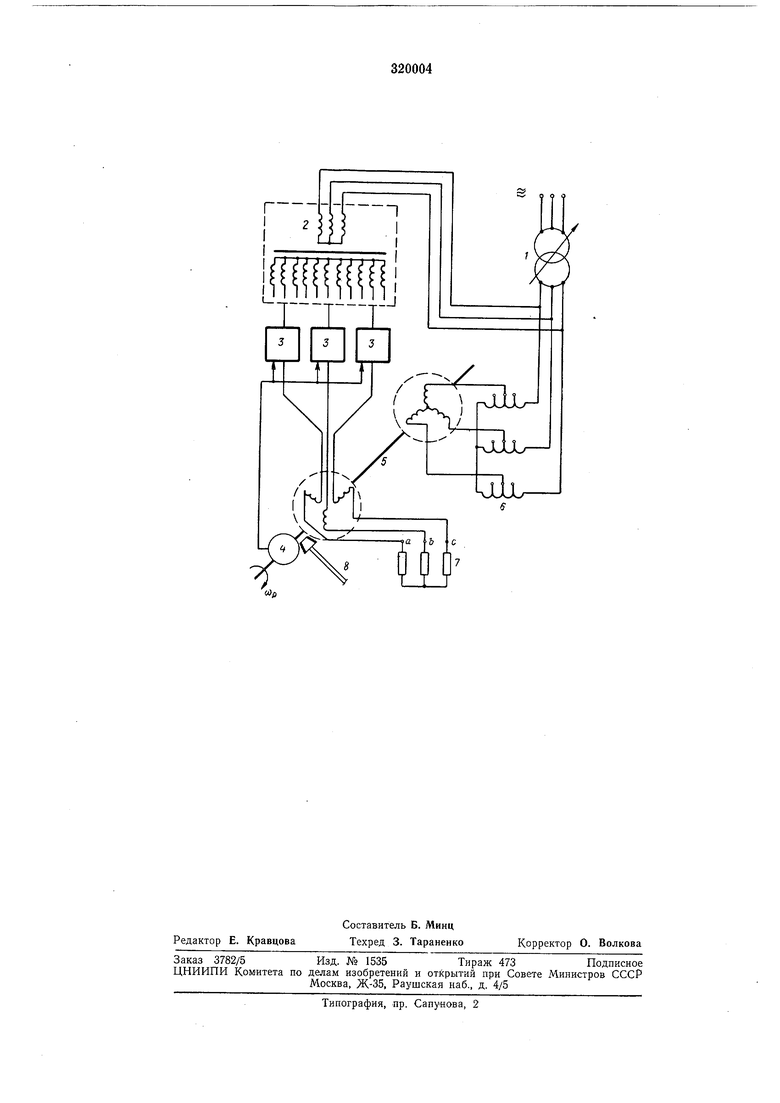
Известен способ управления машинами двойного питания, например асинхронизированными синхронными машинами (АСМ), по которому основные сигналы формируют с помош;ью операционных усилителей, блоков произведения, интеграторов и т. п. Эти элементы, хотя и являются безынерционными, но отличаются низкой надежностью и, так называемым дрейфом нуля. Известен также способ регулирования АСМ машины, по которому формирование амплитуды сигналов управления производится ло э.д.с. углоизмерительной машины (УЙМ), жестко закрепленной на валу АСМ. Систему выходных сигналов управления разностной частоты (частоты скольжения) получают путем перемножения сигналов частоты вращения ротора и питающей сети. Для выполнения операций перемножения регулятор содержит блоки произведения, а также необходимые для их работы операционные усилители постоянного тока. Использование усилителей постоянного тока снижает надежность регулятора и обуславливает наличие в его выходных сигналах дрейфовых постоянных составляющих. Для этого каждый из синусоидальных сигналов образуют путем сложения двух сигналов, при этом амплитуды первых сигналов формируют постоянными, а амплитуды вторых - линейно зависимыми от скольжения. На чертеже приведена схема осуществления предложенного способа. На чертеже приняты следующие обозначения:/ - фазорегулятор, 2 - трансформатор с трехфазной первичной и т-фазной вторичной обмотками, 3 - многофазные фазовые детекторы (МФД), 4-датчик частоты вращения, 5-асинхронный датчик, 6 - автотрансформатор, 7 - сопротивление нагрузки, 8 - электромеханический корректор (необходим при отсутствии фазорегулятора 1). Фазорегулятор / обеспечивает регулирование фазы напряжения сети (коррекцию угла А), вместо него может быть использован электромеханический корректор 8. Трансформатор 2 используют для формирования т-фазной системы векторов напряжения сети. Многофазные фазовые детекторы 3 осуществляют выделение напряжения разностной частоты (частоты скольжения S). Выходное напряжение МФД, кроме основной полезной гармоники (Уосозв, содержит целый спектр высших гармоник ив(п1, (и), амплитуда которых обратно пропорциональна числу фаз МФД.
Датчик 4 частоты вращения предназначен для формирования управляющих сигналов коммутационными элементами МФД. Конструктивное выполнение этого датчика зависит от конкретной схемы МФД. Датчик 5 является асинхронной машиной с фазным ротором малой мощности. При вращении ротора датчика на его статорных обмотках индуктируется э. д. с. частоты скольжения с амплитудой линейно изменяющейся со скольжением. Автотрансформатор 6 позволяет изменять ток ротора асинхронного датчика, что необходимо для уставки требуемой величины коэффициента регулирования (ai).
Сигналы, амплитуда которых не зависит от скольжения машины, формируются с помощью многофазных фазовых детекторов МФД. Амплитуды трехфазной системы напряжений частоты скольжения определяют величину коэффициента регулирования «оВыходное напряжение блока МФД имеет вид:
/0, t/oCOSe + LB (WlCOo) ,
где t/ocos0 - напряжение основной гармоники;
УвС соо)-напряжение высших гармоник; в шо-5- - угол между геометрической осью ротора и синхронно вращающейся осью, связанной с полем статора АСМ.
С помощью асинхронного датчика 5 осуществляют формирование сигналов частоты скольжения с амплитудой, пропорциональной скольжению S и коэффициенту регулирования Oil
t/5. ai-s.f/ccose.
Суммируя пофазно указанные сигналы, получают трехфазную симетричную систему напряжений частоты скольжения с амплитудой, пропорциональной «о и ai-5.
i//a («о + aiS) cos (в -f Л). f//b(ao + ai5)cos(e-f Л-120°).
Ь/с («о + ai5)cos(e + Л + 120°).
К выходным зажимам (а, Ь, с) регулятора
непосредственно подсоединена нагрузка (цепь управления силового элемента машины). Сформированный сигнал позволяет регулировать напряжение ротора машины простым, и вместе с тем обеспечивающим устойчивую работу машины способом.
Поддержание требуемой величины фазового сдвига (угла А) по предложенному способу регулирования может осуществляться путем регулирования фазы сети с помощью фазорегулятора 1, и при отсутствии фазорегулятора 1 Путем одновременного изменения углового положения статоров датчиков 4 и 5.
Способ позволяет обеспечить качественное формирование выходного сигнала в диапазоне ±0,3 S.
Предмет изобретения
Способ управления машиной двойного питания путем формирования синусоидальных сигналов по числу фаз ротора, амплитуда каждого из которых определяется величиной скольжения, а частота равна частоте скольжения машины, отличающийся тем, что, с целью повышения надежности и стабильности работы, каждый из указанных сигналов образуют путем сложения двух сигналов, при этом амплитуды первых сигналов формируют постоянными, а амплитуды вторых - линейно зависимыми от скольжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический регулятор возбуждения для асинхронного электродвигателя с фазным ротором | 1980 |
|
SU928595A1 |
| Задатчик активного тока дляАСиНХРОННОй МАшиНы | 1978 |
|
SU847479A1 |
| Устройство для пуска синхронной машины, преимущественно асинхронизированной | 1986 |
|
SU1494183A1 |
| Устройство для управления асинхронным короткозамкнутым электродвигателем (его варианты) | 1980 |
|
SU928587A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| Устройство для измерения электромагнитного момента асинхронного электродвигателя | 1987 |
|
SU1545107A1 |
| УСТРОЙСТВО для ФОРМИРОВАНИЯ ОТПИРАЮЩИХ ИМПУЛЬСОВ ВЕНТИЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ | 1970 |
|
SU287177A1 |
| АСИНХРОННО-ВЕНТИЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙКАСКАД | 1968 |
|
SU219690A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| Способ управления асинхронным двигателем с фазным ротором | 1989 |
|
SU1723652A1 |