(54) ЗАДАТЧИК АКТИВНОГО ТОКА ДЛЯ АСИНХРОННОЙ МАШИНЫ
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1978 |
|
SU797043A1 |
| Устройство для управления асинхронным двигателем | 1978 |
|
SU888316A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Устройство для управления электроприводом переменного тока | 1977 |
|
SU738090A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Электропривод переменного тока | 1979 |
|
SU828356A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
Изобретение относится к электротехнике и может быть использовано в устройстве управления асинхронной машиной с фазным ротором, подключенным к регулируемому источнику питани при этом статор машины подключен к сети. Известны устройства управления асинхронной машиной с фазным ротором содержащие задачик активного и реактивного токов ротора 1 . Однако задатчик активного тока ро тора в данном устройстве управления содеряа1т датчик скорости и регулятор скорости, что усложняет устройство. Наиболее близким к изобретению яв ляется задатчик активного тока, содержащий регулятор реактивного тока, датчики активного и реактивного токов, блок деления, входы которого связаны с датчиками активного и реак тивного токов, а вькод связан через сумматор со входом регулятора актив- ноге тока. Задатчик реактивного тока содержит также регулятор тока с узлом сравнения на его входе, связанным одним из входов с датчиком скорости Г2 . Однако наличие регулятора скорости усложняет схему задатчика. Цель изобретения - упрощение задатчиками активного тока. Указанная цель достигается тем, что задатчик активного тока для асинг хронной машины, содержащий регулятор реактивного тока, датчики активного и реактивного токов, блок деления, входы которого связаны с датчиками активного и реактивного токов, а выход через сумматор - со входом регулятора активного тока, снабжен блоком умножения и «дополнительным блоком- деления, вход делимого которого подключен к выходу регулятора активного тока, вход делителя - к выходу регул ятора реактивного тока, а выход связан.с вычитающим входом сумматора и с одним входом блока умножения, второй вход которого подклкгчен к выходу сумматора, а выход соединен с суммирукнцим входом сумматора.
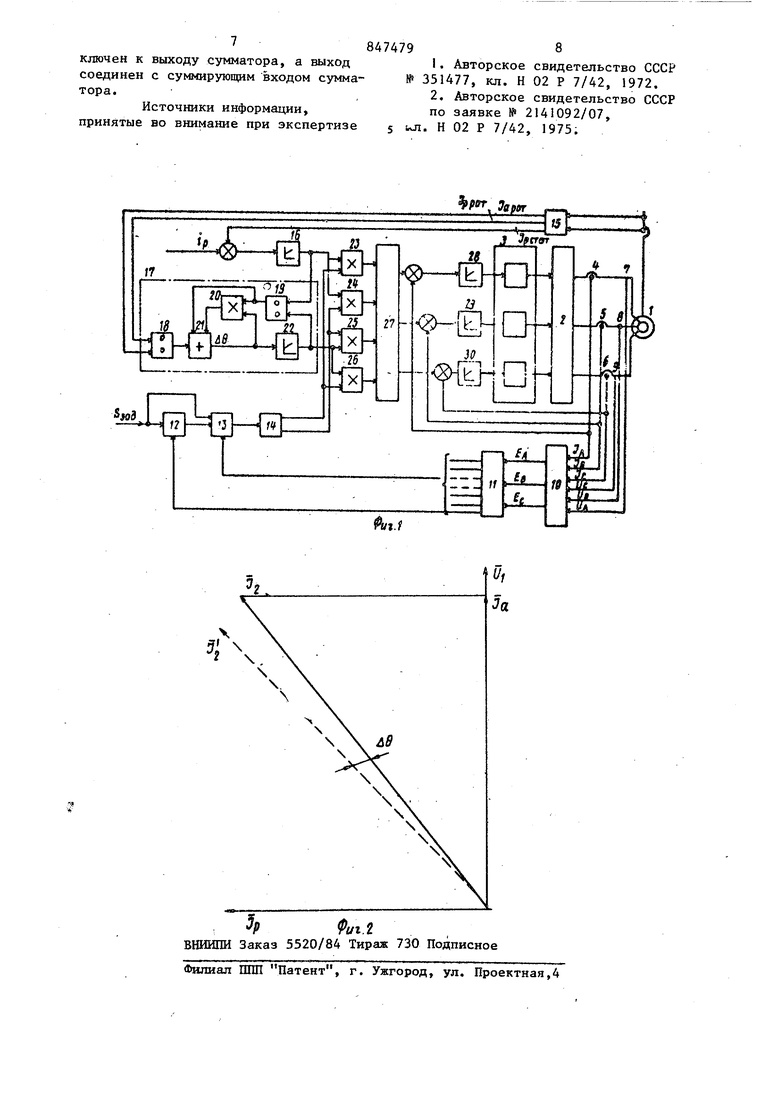
На фиг.1 показана асинхронная мапшна с фазовым ротором, и с устройством управления, содержащим задатчик активного тока; на фиг.2 - векторная диаграмма напряжений и токов.
Асинхронная машина 1 с фазньм ротором подключена к сети статорными обмотками. Обмотки ротора подключены к преобразователю 2 частоты с блоком 3 управления. Датчики 4, 5 и 6 фазных токов ротора и датчики 7, 8 и 9 фазных напряжений ротора подключены к датчику 10 фазньгх ЭДС ротора, выход которого через коллектор 1I частоты и фазы тока ротора связан с задающим генератором 12 и пересчетным блоком 13, выходкоторого подключен к формирователю 14 гармонических функций. Датчик 15 активных и реактивных составляющих токов статора и ротора своими выходами связан с регулятором 16 реактивного тока ротора и с задатчиком 17 активного тока ротора, который содержит блоки 18 и 19 деления, блок 20 умножения, сумматор 21 и регулятор 22 активного тока ротора. Блоки 23 - 26 умножения своими входами связаны с регуляторами16 и 22 токов pOTOpaj а выходами через координатный преобразователь 27 - с регуляторами 28 30 фазных токов ротора.
На фиг.2 обозначено: результирующий вектор и напряжения статора, результирующий вектор Эп тока ротора в установившемся режиме перед нача- лом переходного процесса, активный Л и реактивный Зр токи, составляющие ток ротора Jrj , вектор 5п тока ротора при наличии отклонения фактического скольжения от задаваемого, угол йд рассогласования по фазе векторов 3 f Эп.Задатчик реактивного тока в составе электропривода с асинхронной ма( шиной работает следукщим образом.
Сигнал ЗлддЗадания скольжения ротора асинхронной машины поступает на вход задакядего генератора 12, импульсы с выхода которого поступают в пересчетный блок 13, выходные сигналы которого поступают в формирователь 14 и участвуют в формировании гармонических функций sin Hi-t HCOSIbt.
Знак угла fb зависит от знака сигнала5 д, определяющего напряжение счета пересчетного блока.особенность пересчетного блока является возможность установки ряда фиксированных состояний при наличии соответствующих внешних сигналов.
С выхода формирователя 14 снимаются гармонические сигналы постоянной амплиту ды 9in(b-fc cos fb 4 , частота которых определяется частотой задающего генератора 12, а фаза - логическим состоянием пересчетного блока 13 Этими сигналами задаются частота и фаза активной и реактивной составляющих тока ротора. Амплитуда данных составляющих задается выходными сигналами регулятора 22 активного тока и регулятора 16 реактивного тока, В результате перемножения гармонических сигналов на сигналы регулятора активного тока и регулятора реактивного тока в блоках 23 - 26 умножения получают на их выходах гармонические сигналы задания активной и реактивной составляющих тока ротора. Выходные сигналы блоков умножения преобразовываются координатным преобразователем 27 в трехфазную систему синусоидальных сигналов, являющихся сигналами задания фазньгх токов ротора двигателя.
Фазные токи ротора двигателя формируются замкнутой системой автоматического регулирования, состоящей из трех контуров фазных регуляторов тока Каждьй контур включает регулятор тока, соответствующую фазу преобразователя частоты с системой управления, датчик тока данной фазы. На входе регулятора сравниваются сигнал задания тока данной фазы и сигнал обратной связи с соответствующего по фазе датчика тока. Выходной сигнал регулятора поступает на вход системы управления преобразователем.
Для регулирования реактивного тока статора двигателя на вход регулятора 16 реактивного тока ротора в качестве сигнала обратной связи заводится .сигнал реального значения реактивного тока статора, поступающий с выхода датчика 15. Этот сигнал сравнивается на входе регулятора с сигналомip задания реактивного тока статора. На входы датчика 15 поступают трехфазные сигналы тока и напряжения статора двигателя. Для корректировки частоты и фазы гармонических сигналов задания токов ротора относительно ЭДС ротора испол зуются задающий генератор 12 и пересчетный блок 13, исходное состояние которых задается импуль,сами корректо ра 11. Моменты появления корректора соответствуют различным фазовым значениям ЭДС ротора (например, импульсы могут формироваться через интерва Т/6 или Т/12, где Т - период ЭДС). Для формирования импульсов используются сигналы Ед, Eg и Е фазных ЭДС ротора, поступающие на входы корректора блока 13 с нескольких выходов корректора, причем с каждого выхода поступают импульсы, соответствуквдие одной строго определенной фазе ЭДС двигателя. Импульс с каждого выхода корректора переводит пересчетный бло в такое состояние, которое соответствует фазе данного импульса. Одновременно с каждым импульсом , поступающим на пересчетньй блок, с коррек тора поступает импульс на задающий генератор и переводит генератор в исходное состояние. Всем этим достигается постоянное совпадение по фазе реактивной составляющей тока Лр рото ра с фактическим потоком,асинхронной машины. Активная составляющая тока ротора постоянно нормальна к потоку. Если частота сиг налов snrif)t , cosj) t такова, что вектор Q занимает неизменное положение относительно U при заданных значениях амплитуды активно и реактивной составляющих тока и начальной установке сЛ пересчетного кольца, то фактические значения Зо( и Лр остаются неизменными и равными 3c, Kic( , - задаваемая час тота отличается от фактической часто ты скольжения, вектор занимает новое положение J,j , сдвинутое отно.ситепьно прежнего на угол д9 . Дпя малых дв имеем Д) V d Ia i T uQ-Agf. Из сигнала можно выделить сигнал йО произведя операцию вычитания-(J,0 Vifj IP Эта операция осуществляется в сумматоре 21 при подаче на его входы сигналов ,-ь44.д0. Сигнал 5 формируется с помощью делителд. Вычитаемый из сигнала Н сигнал - формируется с помощью делимого. Сигнал-т- формируется с помощью умножителя 20. Выходной сигналив сумматора - это сигнал рассогласования по углу между заданным вектором J и фактическим вектором 5lj . Производная сигнала и 0 - сигнал ошибки частоты вращения. Сигнал Д0 является входным сигналом регулятора активного тока. Регулятор 22 активного тока - пропорционально-интегрально-дифференциальный - обеспечивает+необходимую комбинацию сигналовД0,5лба, в своем выходном сигнале, являющемся сигналом задания активного тока ротора. Выходной сигнал регулятора 22 обеспечивает формирование момента на валу асинхронной машины, который стремится обеспечить заданное 5 скольжение ротора. В предлагаемом задатчике не применяется электромеханический датчик скорости, отсутствует узел сравнения и регулятор скорости, что упрощает техническую реализацию этого задатчика. Формула изобретения Задатчик активного тока для асинхронной машины, содержащий регулятор реактивного тока, датчики активного и реактивного токов, блок деления, входы которого связаны с датчиками активного и реактивного токов, а выход через сумматор связан со входом регулятора активного тока, отличающийся тем, что, с целью упрощения, задатчик снабж1ен блоком умножения и дополнительным блоком деления, делимого которого подключен к выходу регулятора активного тока, вход делителя - к выходу регулятора реактивного тока, а выход связан с вычитающим входом сумматора и с одним входом блока умножения, второй вход которого под
