Nj
СО
4
00
со
149
синхронной машины 1, элементы И 2328 выполнены трехвходовыми. Элементы И 23-28 разделены на три группы, а элементы НЕ 17-29 - на две. Каждый из преобразователей 14-16 тока через один из элементов НЕ 17-19. первой группы соединен с первыми входами двух элементов И соответствующей группы. На вторые и третьи входы указанных элементов И подаются сигналы X, у, Z с датчика 15 и инвертированные сигналы X, у, Z с выходов элементов НЕ 20, 21, 22 второй группы. На выходах элементов И 23- 28 формируются разрешающие сигналы 5с, у, у, Z, Z, запускающие формирователи 6-9 отпирающих импульсов тиристоров катодной и анодной групп непосредственного преобразователя 2 частоты в цепи статорной обмотки синхронной мащины 1. Разрешающий сигнал на входе соответствующего формирователя возникает тогда, когда ток предьщущего импульса достиг нуля, соответствующий тиристор восстановил свои запирающие свойства и данный момент текущего времени находится в пределах интервала проводимости. При этом создается повышение вращающего момента в области синхронной частоты вращения, что уменьшает расход энергии. 5 im.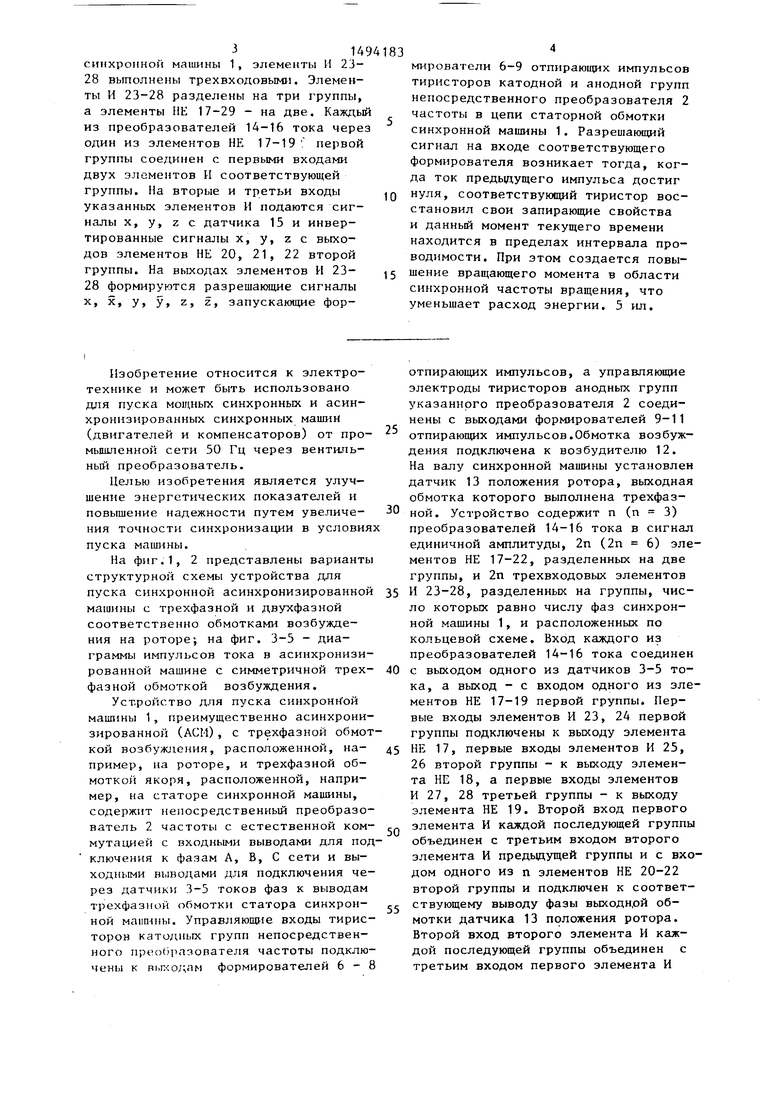
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пуска синхронной машины | 1983 |
|
SU1131002A1 |
| Устройство для пуска синхронной машины | 1984 |
|
SU1264291A1 |
| Устройство для управления машиной двойного питания /его варианты/ | 1982 |
|
SU1116516A1 |
| СПОСОБ КВАЗИЧАСТОТНОГО МЯГКОГО ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2277289C1 |
| АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ФАЗНЫМ РОТОРОМ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2005 |
|
RU2288535C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ ПУСКОМ И ТОРМОЖЕНИЕМ АСИНХРОНИЗИРОВАННОЙ МАШИНЫ | 2011 |
|
RU2466492C1 |
| Электропривод переменного тока | 1988 |
|
SU1603515A1 |
| Способ управления вентильным электродвигателем со звеном постоянного тока при изменении знака его момента и устройство для его осуществления | 1983 |
|
SU1124408A1 |
| Способ управления асинхронизированным электромеханическим преобразователем частоты | 1984 |
|
SU1354334A1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
Изобретение относится к электротехнике. Целью изобретения является улучшение энергетических показателей и повышение надежности за счет увеличения точности синхронизации в условиях пуска. В устройстве для пуска синхронной машины, преимущественно асинхронизированной, выходная обмотка датчика 15 положения ротора выполнена с числом фаз, равным числу фаз асинхронизированной синхронной машины 1, элементы И 23-28 выполнены трехвходовыми. Элементы И 23-28 разделены на три группы, а элементы НЕ 17-22 на две. Каждый из преобразователей 14-16 тока через один из элементов НЕ 17-19 первой группы соединен с первыми входами двух элементов И соответствующей группы. На вторые и третьи входы указанных элементов И подаются сигналы X, Y, Z с датчика 15 и инвертированные сигналы X, Y, Z с выходов элементов НЕ 20,21,22 второй группы. На выходах элементов И 23-28 формируются разрешающие сигналы X, X, Y, Y, Z, Z, запускающие формирователи 6-9 отпирающих импульсов тиристоров катодной и анодной групп непосредственного преобразователя 2 частоты в цепи статорной обмотки синхронной машины 1. Разрешающий сигнал на входе соответствующего формирователя возникает тогда, когда ток предыдущего импульса достиг нуля и соответствующей тиристор восстановил свои запирающие свойства и данный момент текущего времени находится в пределах интервала проводимости. При этом создается повышение вращающего момента в области синхронной частоты вращения, что уменьшает расход энергии. 5 ил.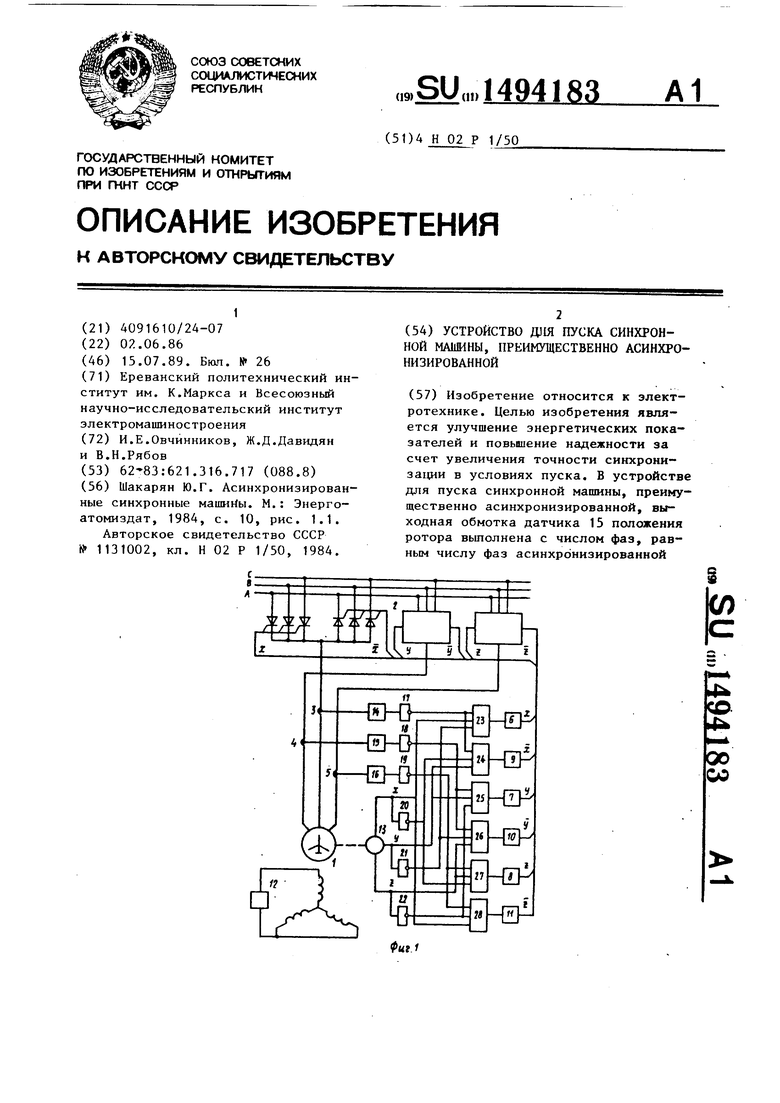
Изобретение относится к электротехнике и может быть использовано для пуска мощных синхронных и асин- хронизированных синхронных машин (двигателей и компенсаторов) от про- мышленной сети 50 Гц через вентильный преобразователь.
Целью изобретения является улучшение энергетических показателей и повышение надежности путем увеличе- ния точности синхронизации в условия пуска машины.
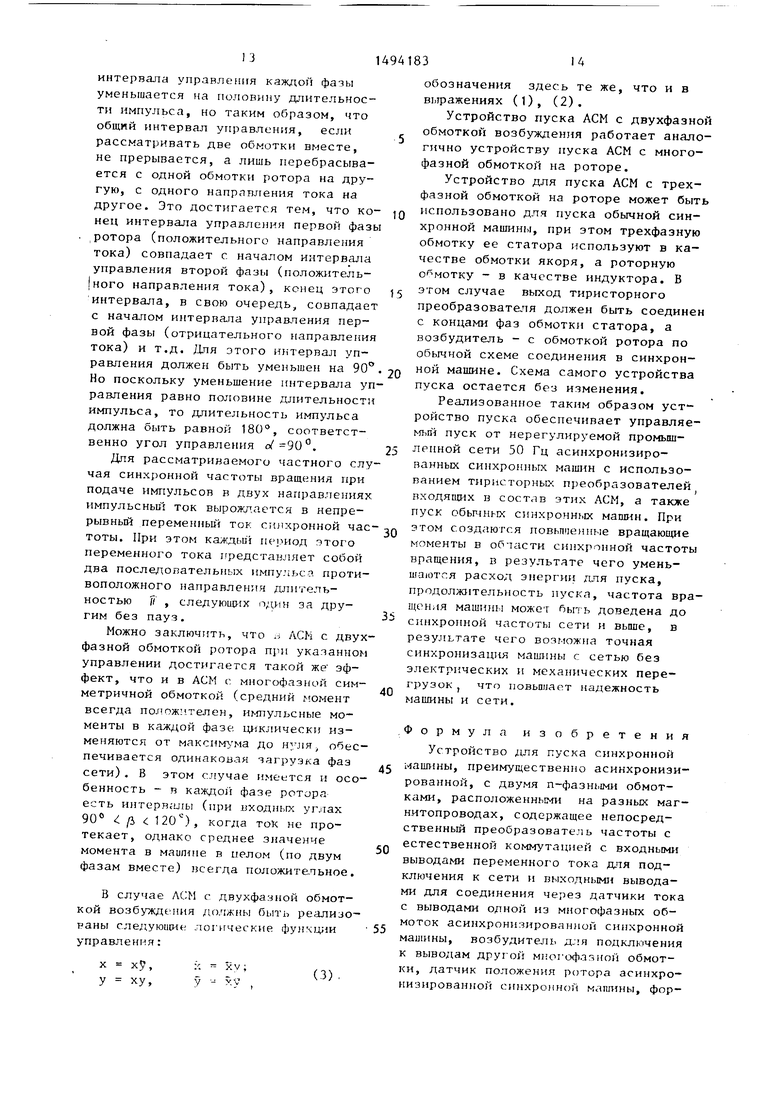
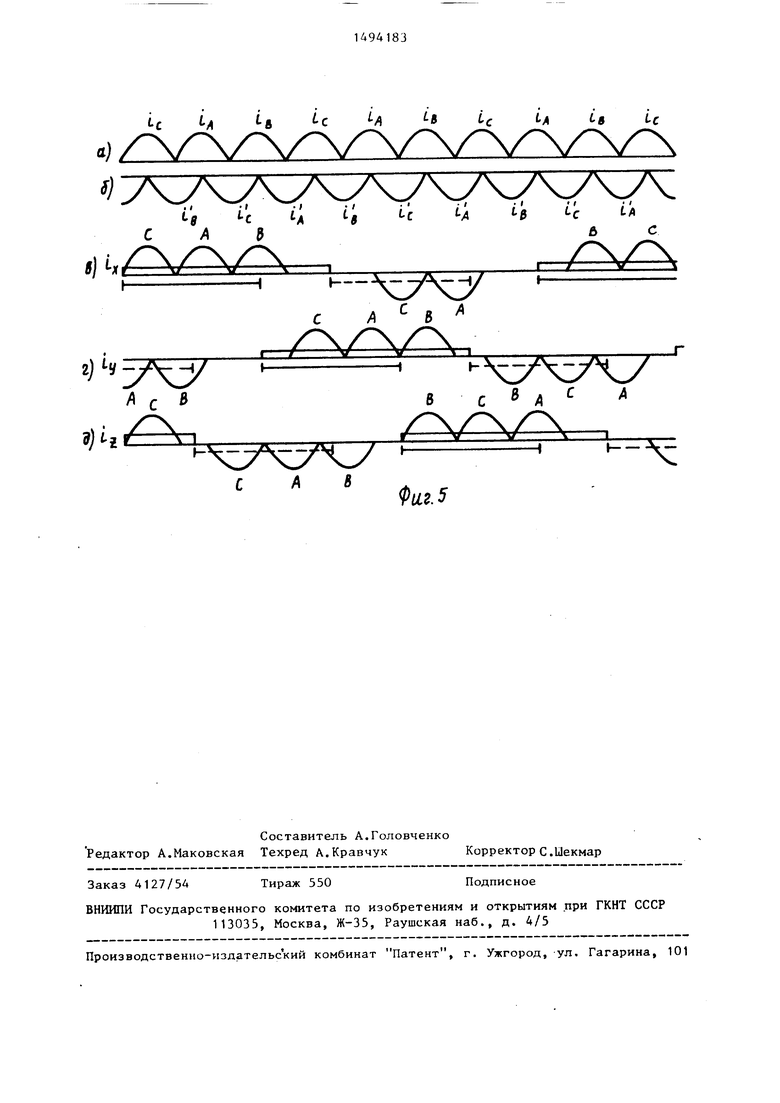
На фиг.1, 2 представлены варианты структурной схемы устройства для пуска синхронной асинхронизированной машины с трехфазной и двухфазной соответственно обмотками возбуждения на роторе; на фиг. 3-5 - диаграммы импульсов тока в асинхронизированной машине с симметричной трех- фазной обмоткой возбуждения.
Устройство для пуска синхронн ой машины 1, преимущественно асинхронизированной (АСМ), с трехфазной обмоткой возбуждения, расположенной, на- пример, на роторе, и трехфазной обмоткой якоря, расположенной, например, на статоре синхронной машины, содержит непосредственный преобразователь 2 частоты с естественной ком- мутацией с входными выводами для подключения к фазам А, В, С сети и выходными выводами для подключения через датчики 3-5 токов фаз к выводам трехфазной обмотки статора синхрон- ной маитны. Управляющие входы тиристоров катодных групп непосредственного преобразователя частоты подключены к В1,г: о/;ам формирователей 6-8
отпирающих импульсов, а управляюш 1е электроды тиристоров анодных групп указанного преобразователя 2 соединены с выходами формирователей 9-11 отпирающих импульсов.Обмотка возбуждения подключена к возбудителю 12. На валу синхронной машины установлен датчик 13 положения ротора, выходная обмотка которого выполнена трехфазной. Устройство содержит п (п 3) преобразователей 14-16 тока в сигнал единичной амплитуды, 2п (2п 6) элементов НЕ 17-22, разделенных на две группы, и 2п трехвходовых элементов И 23-28, разделенных на группы, число которых равно числу фаз синхронной машины 1, и расположенных по кольцевой схеме. Вход каждого из преобразователей 14-16 тока соединен с выходом одного из датчиков 3-5 тока, а выход - с входом одного из элементов НЕ 17-19 первой группы. Первые входы элементов И 23, 24 первой группы подключены к выходу элемента НЕ 17, первые входы элементов И 25, 26 второй группы - к выходу элемента НЕ 18, а первые входы элементов И 27, 28 третьей группы - к выходу элемента НЕ 19. Второй вход первого элемента И каждой последующей группы объединен с третьим входом второго элемента И предьщущей группы и с входом одного из п элементов НЕ 20-22 второй группы и подключен к соответствующему выводу фазы выходн.ой обмотки датчика 13 положения ротора. Второй вход второго элемента И каждой последующей группы обьединен с третьим входом первого элемента И
предыдущей группы и подключен к выходу одного из п элементов 20 - 22 второй группы.
Для данного устройства пуска трехфазного синхронного асинхронизиро- ванного двигателя указанные связи элементов И 23 - 28 с элементами Ш 20-22 организованы следунщим образом .
Второй вход первого элемента И 25 второй (последующей по отношению к первой) группы объединен с третьим входом второго элемента И 2А первой, т.е. предыдущей, группы и с входом элемента НЕ 21 и подключен к вьгеоду у второй фазы выходной обмотки датчика 13 положения ротора. Второй вход второго элемента И 26 второй группы объединен с третьим входом первого элемента И 23 первой группы и подключен к выходу элемента НЕ 21. Второй вход первого элемента И 27 третьей (последующей по отношению к второй) группы соеди - нен с третьим входом второго элемента И 26 второй (предыдущей) группы и с входом элемента НЕ 22 и подключен к выводу z третьей фазы выходной обмотки датчика 13 положения ротора. Второй вход второго элемента И 28 третьей группы объединен с третьим входом первого элемента И 25 второй группы и подключен к выходу элемента НЕ 22. Второй вход первого элемента И 23 первой (последующей по отношению к третьей) группы объединен с третьим входом второго элемента И 28 третьей (предыдущей), группы и с входом элемента НЕ 20 и подключен к выводу х первой фазы выходной обмотки датчика 13 положения ротора. Второй вход второго элемента И 24 первой группы объединен с третьим входом первого элемента И 27 третьей группы и подключен к выходу элемента НЕ 20.
По другому варианту (фиг. 2) устройство используется для управления синхронной машиной с трехфазной ста- торной обмоткой и двухфазной обмоткой ротора. В этом случае уменьша- ется число элементов НЕ, элементов И и формирователей отпирающих импульсов.
Устройство для пуска синхронной машины работает следующим образом.
Назовем интервалом управления промежуток времени, в течение которо0
5
0
5
0
го могут быть поданы управляющие импульсы на тиристоры соответствующей группы. В устройстве начала интервалов управления совпадают с началами разрешенных интервалов. Разрешенный интервал - это промежуток времени, в течение которого ось полюса индуктора находится в пределах полюсного деления обмотки якоря.
Для поддержания положительных значений момента за весь период скольжения ротора при синхронной частоте вводится запрет за прохождение тех импульсов, большая часть площади которых выходит за пределы разрешенного интервала. Для этого длительность интервала управления, когда могут пройти отпирающие импульсы, устанавливается меньше длительности разрешенного интервала на половину длительности импульса.
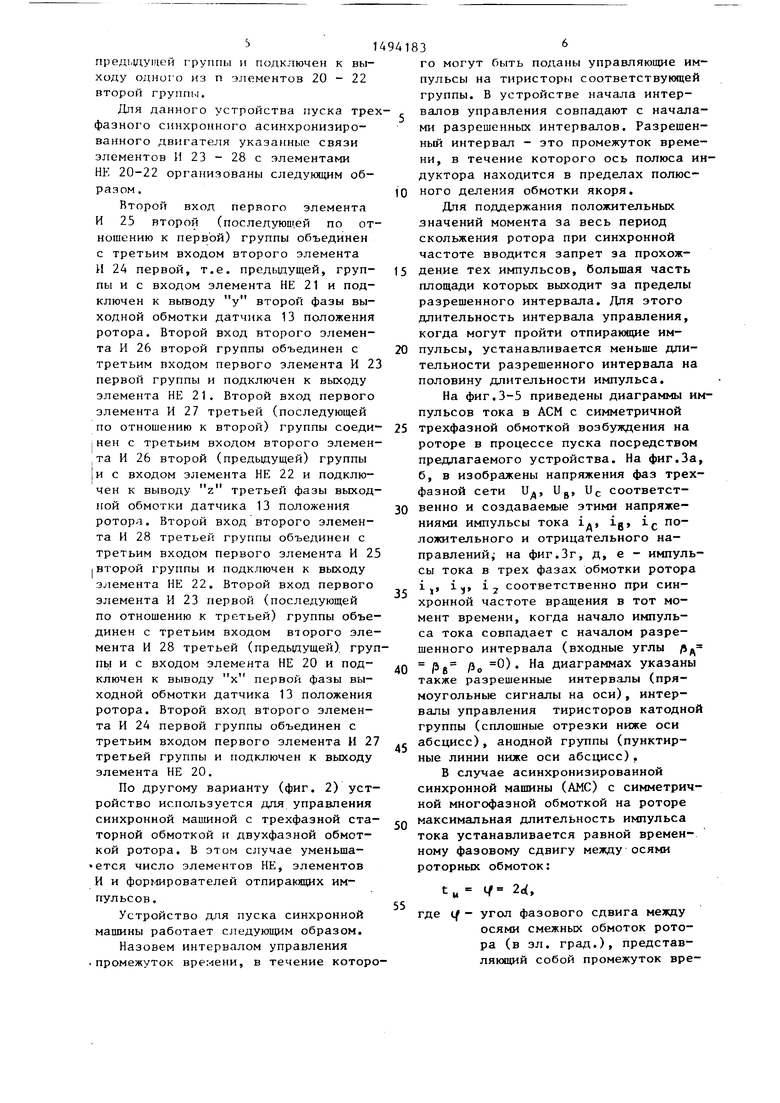
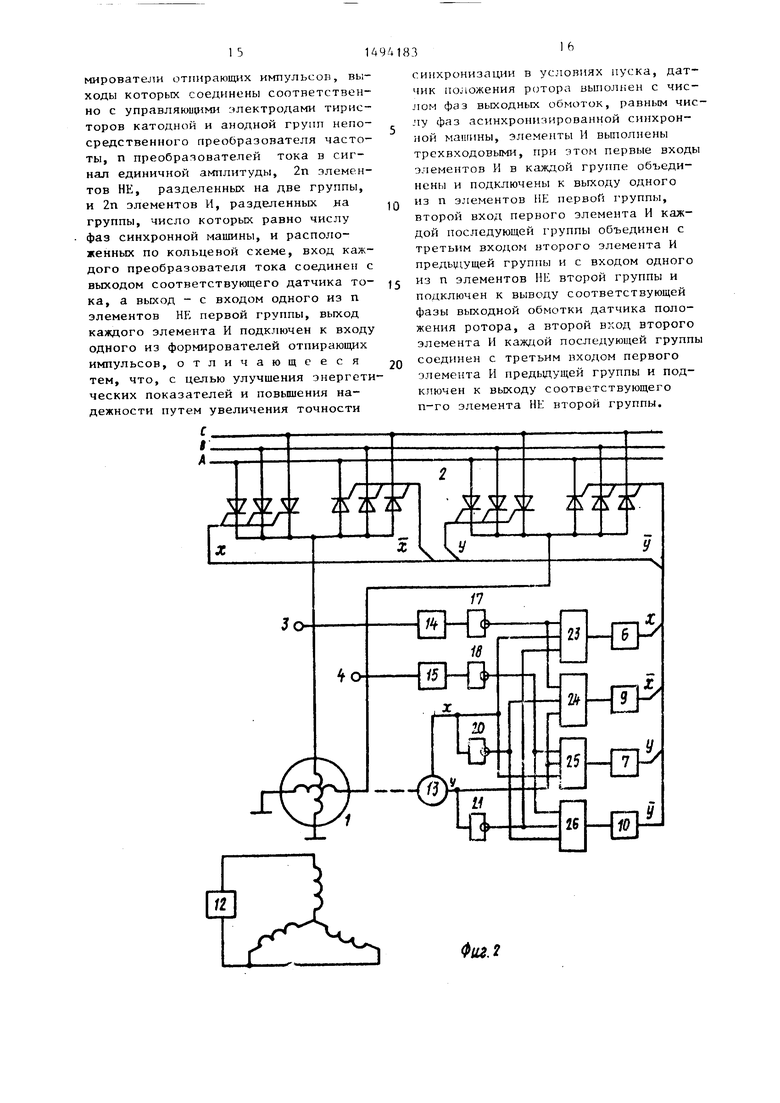
На фиг.3-5 приведены диаграммы импульсов тока в АСМ с симметричной трехфазной обмоткой возбуждения на роторе в процессе пуска посредством предлагаемого устройства. На фиг.За, б, в изображены напряжения фаз трехфазной сети и, Ug, Uc соответственно и создаваемые этими напряжениями импульсы тока 1д, ig, положительного и отрицательного на- правлений на фиг.Зг, д, е - импульсы тока в трех фазах обмотки ротора
5
0
5
0
5
1,, Iv
1 соответственно при синхронной частоте вращения в тот момент времени, когда начало импульса тока совпадает с началом разрешенного интервала (входные углы /i Рв ft о диаграммах указаны также разрешенные интервалы (прямоугольные сигналы на оси), интервалы управления тиристоров катодной группы (сплошные отрезки ниже оси абсцисс), анодной группы (пунктирные линии ниже оси абсцисс).
В случае асинхронизированной синхронной машины (АМС) с симметричной многофазной обмоткой на роторе максимальная длительность импульса тока устанавливается равной временному фазовому сдвигу между осями роторных обмоток:
t 1/ 2о(,
где I/ - угол фазового сдвига между осями смежных обмоток ротора (в эл. град.), представляющий собой промежуток вре
мени между моментами пересечения нейтрали осями смежных обмоток ротора; - угол управления. Максимальное значение угла управления принимается равным
о/ 7Г-Ч
Углы управления устанавливаются одинаковыми для всех тиристоров преобразователя (т.е. для всех фаз сети и ротора). Изменяя угол управления, можно регулировать фазу, амплитуду и длительность импульса, слдовательно, энергию импульса и моме коммутации, а значит, среднее значение электромагнитного момента, созданного этим импульсом тока, и темп пуска. В процессе пуска угол управления может регулироваться в пределах от указанного максимальног значения до нуля, при этом соответственно регулируется величина вращающего момента и, следовательно, темп пуска. Угол управления устанавливается и регулируется посредством известных узлов в формирователях импульсов, например устрой
ством вертикального управления
Для АСМ с трехфазной обмоткой на роторе Ц 120° (фиг.З), если частота вращения машины доводится до синхронной частоты 50 Гц, то длительность импульса соответствует 120° частоты сети, угол управления d 60«.
Если частота вращения машины должна быть доведена до частоты выш синхронной частоты сети, то предельная длительность импульса и угол управления должны быть соответственно уменьшены.
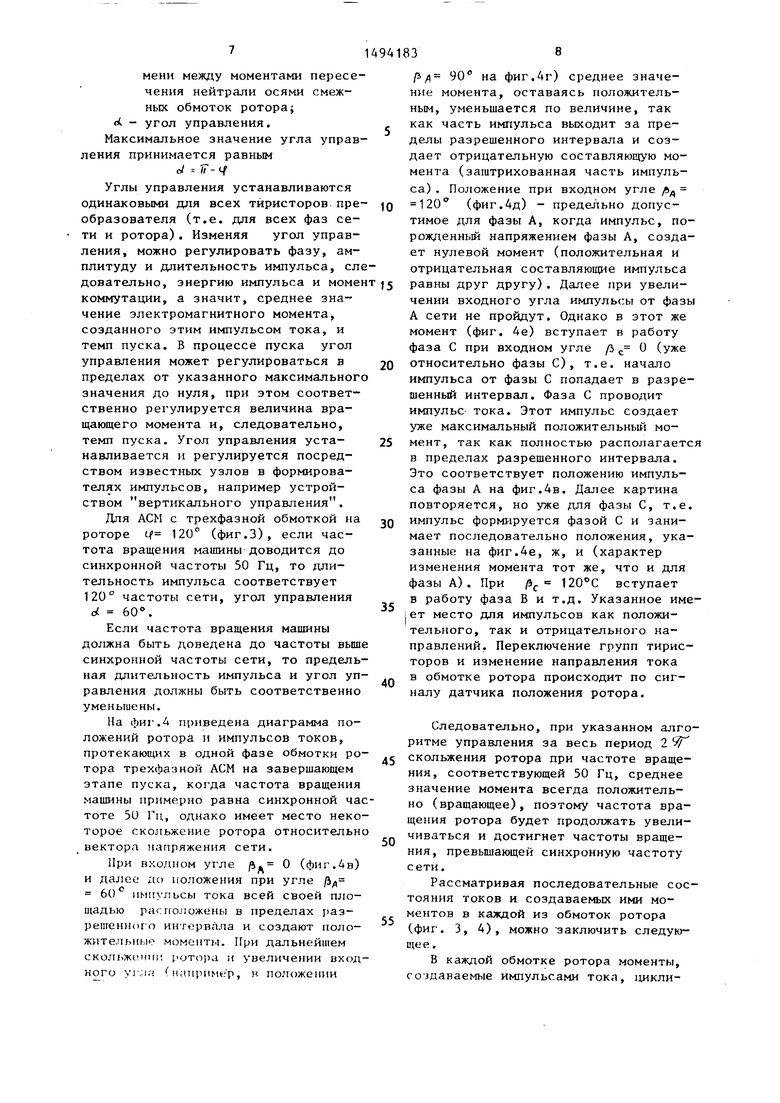
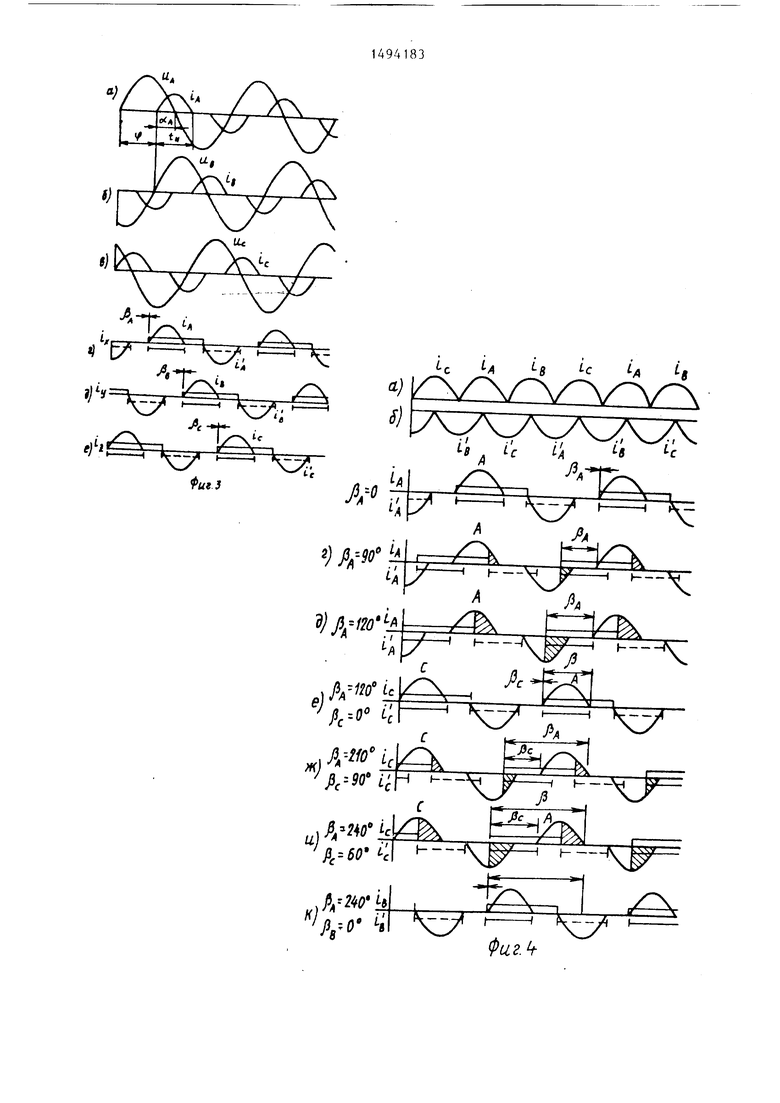
На фиг.А приведена диаграмма положений ротора и импульсов токов, протекающих в одной фазе обмотки ротора трехфазной АСМ на завершающем этапе пуска, когда частота вращения машины примерно равна синхронной чатоте 5U Гц, однако имеет место некоторое скольжение ротора относительн вектора напряжения сети.
При входном угле д О (фиг.4в) далее до положения при угле /Ьд 60 импульсы тока всей своей площадью расположены в пределах j)a3- решен)П)го интервала и создают положительные моменты. При дальнейшем скольжс иии poTojia и увеличении входного чм л.ч (например, в положении
и
10
j
20
4941838
/i/l 90 на фиг.4г) среднее значение момента, оставаясь положительным, уменьшается по величине, так как часть импульса выходит за пределы разрешенного интервала и создает отрицательную составляющую момента (заштрихованная часть импульса) . Положение при входном угле / 120 (фиг.4д) - пpeдeJ ьнo допустимое для фазы А, когда импульс, по- рожденньш напряжением фазы А, создает нулевой момент (положительная и отрицательная составляющие импульса равны друг другу). Далее при увеличении входного угла импульсы от фазы А сети не пройдут. Однако в этот же момент (фиг, 4е) вступает в работу фаза С при входном угле / г (уже относительно фазы С), т.е. начало импульса от фазы С попадает в разрешенный интервал. Фаза С проводит импульс тока. Этот импульс создает уже максимальный положительный момент, так как полностью располагается в пределах разрешенного интервала. Это соответствует положению импульса фазы А на фиг.4в. Далее картина повторяется, но уже для фазы С, т.е. импульс формируется фазой С и занимает последовательно положения, указанные на фиг.4е, ж, и (характер изменения момента тот же, что и для фазы А). При /3j. 120°С вступает в работу фаза В и т.д. Указанное имеет место для импульсов как положительного, так и отрицательного направлений. Переключение групп тиристоров и изменение направления тока в обмотке ротора происходит по сигналу датчика положения ротора.
25
30
35
40
5
0
5
Следовательно, при указанном алгоритме управления за весь период 2 скольжения ротора при частоте вращения, соответствующей 50 Гц, среднее значение момента всегда положительно (вращающее), позтому частота вращения ротора будет продолжать увеличиваться и достигнет частоты вращения, превышающей синхронную частоту сети.
Рассматривая последовательные состояния токов и создаваемых ими моментов в каждой из обмоток ротора (фиг. 3, 4), можно заключить следующее.
В каждой обмотке ротора моменты, создаваемые импульсами тока, циклически изменяются от своего максимального значения до нуля.
Отрицательный средний момент ни при каких условиях не возникает.
Имеет место чередование фаз А, В С сети, создающих импульсы тока в обмотке ротора. Следовательно, все фазы сети загружаются одинаково средним за период током.
Среднее значение момента в каждой фазе ротора, а следовательно, и во всей машине в целом всегда положительное.
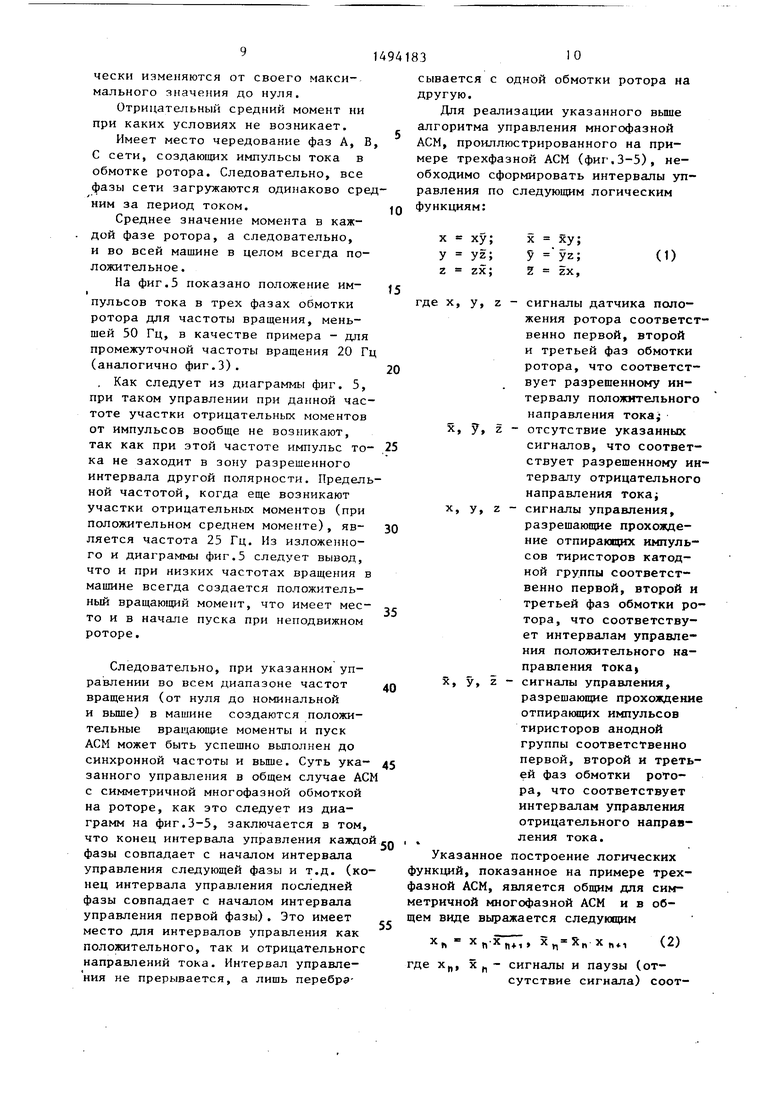
На фиг.5 показано положение им- пульсов тока в трех фазах обмотки ротора для частоты вращения, меньшей 50 Гц, в качестве примера - для промежуточной частоты вращения 20 Гц (аналогично фиг.З).
, Как следует из диаграммы фиг. 5, при таком управлении при данной частоте участки отрицательных моментов от импульсов вообще не возникают, так как при этой частоте импульс то- ка не заходит в зону разрешенного интервала другой полярности. Предельной частотой, когда еще возникают участки отрицательных моментов (при положительном среднем моменте), яв- ляется частота 25 Гц. Из изложенного и диаграммы фиг.5 следует вывод, что и при низких частотах вращения в мащине всегда создается положительный вращающий момент, что имеет мес- то и в начале пуска при неподвижном роторе.
Следовательно, при указанном управлении во всем диапазоне частот вращения (от нуля до номинальной и выше) в машине создаются положительные вращающие моменты и пуск АСМ может быть успешно вьшолнен до синхронной частоты и выше. Суть ука- занного управления в общем случае АС с симметричной многофазной обмоткой на роторе, как это следует из диаграмм на фиг.3-5, заключается в том.
что конец интервала управления каждой фазы совпадает с началом интервала управления следующей фазы и т.д. (конец интервала управления последней фазы совпадает с началом интервала управления первой фазы). Это имеет место для интервалов управления как положительного, так и отрицательногс направлений тока. Интервал управле- ния не прерывается, а лишь перебрз
сывается с одной обмотки ротора на другую.
Для реализации указанного вьше алгоритма управления многофазной АСМ, проиллюстрированного на примере трехфазной АСМ (фиг.3-5), необходимо сформировать интервалы управления по следующим логическим функциям:
ху;
yz; zx;
X ху;
у yz; Z zx.
(1)
0
5 О
0 З
0
5
где X, у, Z - сигналы датчика положения ротора соответственно первой, второй и третьей фаз обмотки ротора, что соответствует разрешенному интервалу положительного направления тока
X, 7 Z - отсутствие указанных
сигналов, что соответствует разрешенному интервалу отрицательного направления тока;
X, у, Z - сигналы управления,
разрешающие прохождение отпирающих импульсов тиристоров катодной группы соответственно первой, второй и третьей фаз обмотки ротора, что соответствует интервалам управления положительного направления тока)
S, у, Z - сигналы управления,
разрешающие прохождение отпирающих импульсов тиристоров анодной группы соответственно первой, второй и третьей фаз обмотки ротора, что соответствует интервалам управления отрицательного направления тока.
I ,
Указанное построение логических функций, показанное на примере трехфазной АСМ, является общим для симметричной многофазной АСМ и в общем виде выражается следующим
h
(2)
где х„, X - сигналы и паузы (отсутствие сигнала) соот п
n
х„ ветственно датчика положения ротора, соответствующие разрешенным интервалам положительного и отрицательного направлений тока п-й фазы обмотки ротора; аналогичные сигналы и паузы датчика положения следующей (п+1)-й фазы обмотки ротора; сигналы управления, формирующие интервалы управления соответственно положительного и отрицательного направлений тока любой п-й фазы обмотки ротора.
Такая формулировка логических функций и, соответственно, формулы изобретения для многофазной симметричной АСМ является общей независимо от количества фаз.
Импульсы тока в обмотке ротора возникают при подаче отпирающих импульсов на тиристоры преобразователя от соответствующих формирователей 6-11. Каждый из указанных формирователей генерирует отпирающие импульсы для тиристоров положительного или отрицательного напраапения тока (катодной или анодной группы) для одной фазы обмотки ротора. Отпирающие импульсы следуют с одинаковой фазой (углом) управления для всех фаз сети подряд. Максимальное значение угла управления d 60 С целью регулирования темпа пуска угол управления может регулироватьс от в(..,„,до нуля в самих формироватеfnv(
лях. Отпирающий импульс на выходе формирователя возникает при наличяи разрешающего сигнала на его входе. Разрешающий сигнал на входе соответствующего формирователя возникает, если одновременно выполняются следующие условия: ток предыдущего импульса достиг нулевого значени .(иьтульс завершен) и тиристор восстановил свои запирающие свойства, т.е. нет запрета по каналу контроля наличия тока; данный момент текущего времени находится в пределах интервала управления, т.е. если имеется разрешение для прохождения соответствующих отпирающие импульсов на выходе логической схемы.
5
0
5
0
5
0
5
0
5
Канал контроля наличия тока первой фазы ротора состоит из последо вательно соединенных датчика 3 тока фазы преобразователя 14 тока в сигнал единичной амплитуды и элемента НЕ 17, соответственно даш второй фазы - датчика 4 тока, преобразователя 15 тока и элемента 18, для третьей фазы - датчика 5 тока, преобразователя 16 тока и элемента Нр; 19, Если в цепи обмотки ротора протекает ток, то на выходе соответствующего элемента НЕ 17 (18, 19) и, следовательно, на первых входах элементов И 23-28 отсутствует сигнал, что не допускает появления разрешающих сигналов на выходе упомянутых элементов И, формирователи 6-11 не запускаются. Если в цепи фазы сбмотки ротора ток достиг нуля, то на входе элемента НЕ 17 (18, 19) сиг нал снимается, соответственно на выходе элемента НЕ появляется сигнал, который допускает появление разрешающих сигналов на выходе од}юго из элементов И и, соответственно, запускается соответствующий формирователь. Небопьшая временная задержка для восстановления TnpHCTop.iMii г апираю- ifHX свойств создается в преобразователях 14-16 тока или в самих формирователях 6-11, например, введением узла задержки на несколько 1-н-:кро- секунд.
Логическая функция управления (1) peajiHsyeTCH логическими элементами 23-28. На выходе элементов И 23-28 вырабатываются разрешающие сигналы X. X, у, у, Z, Z, соответствующие интервалам управления. На вторые и третьи входы элементов И в соответствии с функцией управления (1) подаются сигналы датчиков положения фаз ротора (х, у, z) и те же сигналы - через элементы НЕ 20-22 (х, у, z) . Разрещающими сигналами с выходов элементов И 23-28 запускаются формирователи 6-11.
Указанный принцип может бьп ь реализован аналогичным образок и для устройства пуска АСМ с двухфазной обмоткой возбуждения на роторе, а также для обычной синхронной машины с обмоткой возбуждения постоянного тока на роторе.
В устройстве пуска АСМ с двухфазной обмоткой возбуждения реализуется тот же принцип, когда длительность
интервала управления каждой фазы уменьшается на половину длительности импульса, но таким образом, что общий интервал управления, если рассматривать две обмотки вместе, не прерывается, а лишь перебрасывается с одной обмотки ротора на другую, с одного направления тока на другое. Это достигается тем, что конец интервала управления первой фазы ротора (положительного направления тока) совпадает с началом интервала управления второй фазы (положитель- 1ного направления тока), конец этого интервала, в свою очередь, совпадает с началом интервала управления первой фазы (отрицательного направления тока) и т.д. Для этого интервал управления должен быть уменьшен на 90 Но поскольку уменьшение интервала управления равно половине длительности импульса, то длительность импульса должна быть равной 180, соответственно угол управления .
Для рассматриваемого частного случая синхронной частоты вращения при подаче импульсов в двух направлениях импульсньй ток вырожпастся в непрерывный переменны ток синхронной час тоты. При этом каждьи период этого переменного тока ггредставляет собой два последопательных импу.чьса противоположного направления длительностью TI , следующих п;;ин за другим без пауз.
Можно заключить, что . ЛСМ с двухфазной обмоткой ротора при указанном управлении достигается такой же эффект, что и в АСМ с многофазной симметричной обмоткой (средний момент всегда положителен, импульсные мо- менть в каждой фазе циклически изменяются от максим, ма до нз ля, обеспечивается одинаковая загрузка фаз сети). В этом случае имеется и особенность - п каждо фазе ротора есть интервгшы (при входных углах 90 ft, UO), когда Tok не протекает, однако среднее значение момента в Mauniiie в пелом (по двум фазам вместе) всегда положительное.
В случае ЛСМ с двухфазной обмоткой возбуткдеиия должны быть реализованы следующие логические управления:
X х5, у ху.
(3)
to
15
0
5
Q
0
5
0
5
обозначения здесь те же, что и в вьфажениях (1), (2).
Устройство пуска АСМ с двухфазной обмоткой возбуждения работает аналогично устройству пуска АСМ с многофазной обмоткой на роторе.
Устройство для пуска АСМ с трехфазной обмоткой на роторе может быть использовано для пуска обычной синхронной машины, при этом трехфазную обмотку ее статора используют в качестве обмотки якоря, а роторную ор мотку - в качестве индуктора. В этом случае выход тиристорного преобразователя должен быть соединен с концами фаз обмотки статора, а возбудитель - с обмоткой ротора по обычной схеме соединения в синхронной машине. Схема самого устройства пуска остается без изменения.
Реализованное таким образом устройство пуска обеспечивает управляе- Miirfi пуск от нерегулируемой промышленной сети 50 Гц асинхронизиро- ванных синхронных машин с использованием тиристорньсх преобразователей J входящих в состав этих АСМ, а также пуск обьтних синхронных машин. При этом создаются повьппениые вращающие моменты в об-1г1сти синхронной частоты вращения, в результате чего уменьшаются расход энерги для пуска, продолжительность пуска, частота вращения машины может быть доведена до синхронной частоты сети и вьш1е, в результате чего возмож1га точная синхронизация машины с сетью без электрических и механических перегрузок J что повьшшет надежность машины и сети.
Формула изобретения
Устройство для пуска синхронной машины, преимущественно асинхронизи- рованной, с двумя п-фазньпчи обмотками, расположенными на разных маг- нитопроводах, содержащее непосредственный преобразователь частоты с естественной коммутацией с входными выводами переменного тока для подключения к сети и выходными выводами для соединения через датчики тока с выводами одной из многофазньрс обмоток асинхронизированлой синхронной маи1ины, возбудитель для подключения к выводам другой многофазной обмотки, датчик положения ротора асинхро- низированной синхронной маитны, фор-
мирователи отпирающих импульсов, выходы которых соединены соответственно с управляюи(ими электродами тиристоров катодной и анодной групп непосредственного преобразователя частоты, п преобразователей тока в сигнал единичной амплитуды, 2п элементов НЕ, разделенных на две группы, и 2п элементов И, разделенных ца группы, число которых равно числу фаз синхронной машины, и расположенных по кольцевой схеме, вход каждого преобразователя тока соединен с выходом соответствующего датчика тока, а выход - с входом одного из п элементов НЕ первой группы, выход каждого элемента И подключен к входу одного из формирователей отпирающих импульсов, отличающееся тем, что, с целью улучшения энергетических показателей и повьщ1ения надежности путем увеличения точности
С I.
А.
7
5
0
синхронизации в условиях пуска, датчик положения pcjTopa выполнен с числом фаз выходных обмоток, равным числу фаз асинхронизированной синхронной машины, элементы И вьтолнены трехвходовыми, при этом первые входы элементов И в каждой группе объединены и подключены к выходу одного из п элементов НР первой группы, второй вход первого элемента И каждой последующей группы объединен с третьим входом второго элемента И предыдущей группы и с входом одного из п элементов НЕ второй группы и подключен к выводу соответствующей фазы выходной обмотки датчика положения ротора, а второй вход второго элемента И каждой последующей группы соединен с третьим входом первого элемента И предыдущей группы и подключен к выходу соответствующего п-го элемента НЕ второй группы.
7
}
-,У;У:У
Фиг. 2
)
)
и с
н-
)
1
Д Г45 с fl,--60
Л в
л
LC A t c i/} i-B LC LA t- LC
A с )гГ
A В
Составитель А.Головченко Редактор А.Маковская Техред А.Кравчук Корректор с.Ыекмар
Заказ 4127/54
Тираж 550
ВНИИПИ Государственного коь итета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственио-издательс кий комбинат Патент, г. Ужгород,-ул. Гагарина, 101
Вс A 4
/
W ,YVЛI
X
Фиг. 5
Подписное
| Шакарян Ю.Г | |||
| Асинхронизирован- ные синхронные машины | |||
| М.: Энерго- атомиздат, 1984, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для пуска синхронной машины | 1983 |
|
SU1131002A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
