(21) 28l26V2 t-10
(22)13.07.87
23.02.90. Бюл. Р 7
Пермский политехнический инсти0 6)
(70
тут
(72) М.Я.Кривицкий, А.М.Вачегин
и С.В.Добрынин
(53) 621.313.13:621.3.082.7(088.8)
(56)Авторское свидетельство СССР If , кл. G 01 L 3/00, 1970.
Авторское свидетельство СССР N 691703. кл. G 01 L 3/Ю, 1977. ( УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ
(57)Изобретение относится к измерительной технике, а именно к устройствам для измерения электромагнитного момента машин переменного тока. Целью изобретения является повышение
1 Э
быстродействия. Сигналы с датчиков i-j тока поступают на первые входы модуляторов и первые входы сумматоров , на вторые входы которых подаются сигналы с датчиков напряжений. Сигналы с выходов сумматоров 9-11 через соответствующие интеграторы 15-17 поступают на первые входы модуляторов 22-2. На вторые входы модуляторов подается симметричная многофазная система высокочастотных опорных сигналов от трехфазного генератора 33 импульсов. Сигналы от модуляторов 19-21 после суммирования в сумматоре 12 и фильтрации в фильтре 26 низких частот преобразуются в векторный сигнал, характеризующий пространственный вектор тока статора электродвигателя 2, а сигналы от модуляторов 22-2 после аналогичной обработки в сумматоре 13 и фильтре 27 низких частот преобразуются в векторный сигнал, характеризующий пространственный вектор потокосцепления, Этот векторный сигнал подается после выпрямления выпрямителем 30 на вход компаратора 31, управляющего модулятором 25, и через выпрямитель 30 на один вход блока 32 умножения, на другой вход которого подается сигнал с модулятора 25. Сигнал с выхода блока 32 умножения после фильтрации пропорционален электромагнитному моменту. 3 ил.
(Л
ел
Јъ
сл
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
| Устройство для измерения электромагнитного момента асинхронного двигателя | 1989 |
|
SU1645856A1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| Электропривод переменного тока | 1987 |
|
SU1443074A1 |
| ТРЕХФАЗНЫЙ АКТИВНЫЙ ВЫПРЯМИТЕЛЬ НАПРЯЖЕНИЯ ДЛЯ СЕТЕЙ С НЕСИММЕТРИЧНЫМ НАПРЯЖЕНИЕМ | 2023 |
|
RU2824932C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Асинхронный электропривод | 1989 |
|
SU1697252A1 |
| Устройство для управления частотно-регулируемым асинхронным электроприводом | 1991 |
|
SU1793527A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРОМАГНИТНОГО МОМЕНТА АСИНХРОННОГО ДВИГАТЕЛЯ | 1991 |
|
RU2039955C1 |
Изобретение относится к измерительной технике, а именно к устройствам для измерения электромагнитного момента машин переменного тока. Целью изобретения является повышение быстродействия. Сигналы с датчиков 1-3 тока поступают на первые входы модуляторов 19-21 и первые входы сумматоров 9-11, на вторые входы которых подаются сигналы с датчиков 5-7 напряжений. Сигналы с выходов сумматоров 9-11 через соответствующие интеграторы 15-17 поступают на первые входы модуляторов 22-24. На вторые входы модуляторов 19-24 подается симметричная многофазная система высокочастотных опорных сигналов от трехфазного генератора 33 импульсов. Сигналы от модуляторов 19-21 после суммирования в сумматоре 12 и фильтрации в фильтре 26 низких частот преобразуются в векторный сигнал, характеризующий пространственный вектор тока статора электродвигателя 42, а сигналы от модуляторов 22-24 после аналогичной обработки в сумматоре 13 и фильтре 27 низких частот преобразуются в векторный сигнал, характеризующий пространственный вектор потокосцепления. Этот векторный сигнал подается после выпрямления выпрямителем 30 на вход компаратора 31, управляющего модулятором 25, и через выпрямитель 30 - на один вход блока 32 умножения, на другой вход которого подается сигнал с модулятора 25. Сигнал с выхода блока 32 умножения после фильтрации пропорционален электромагнитному моменту. 3 ил.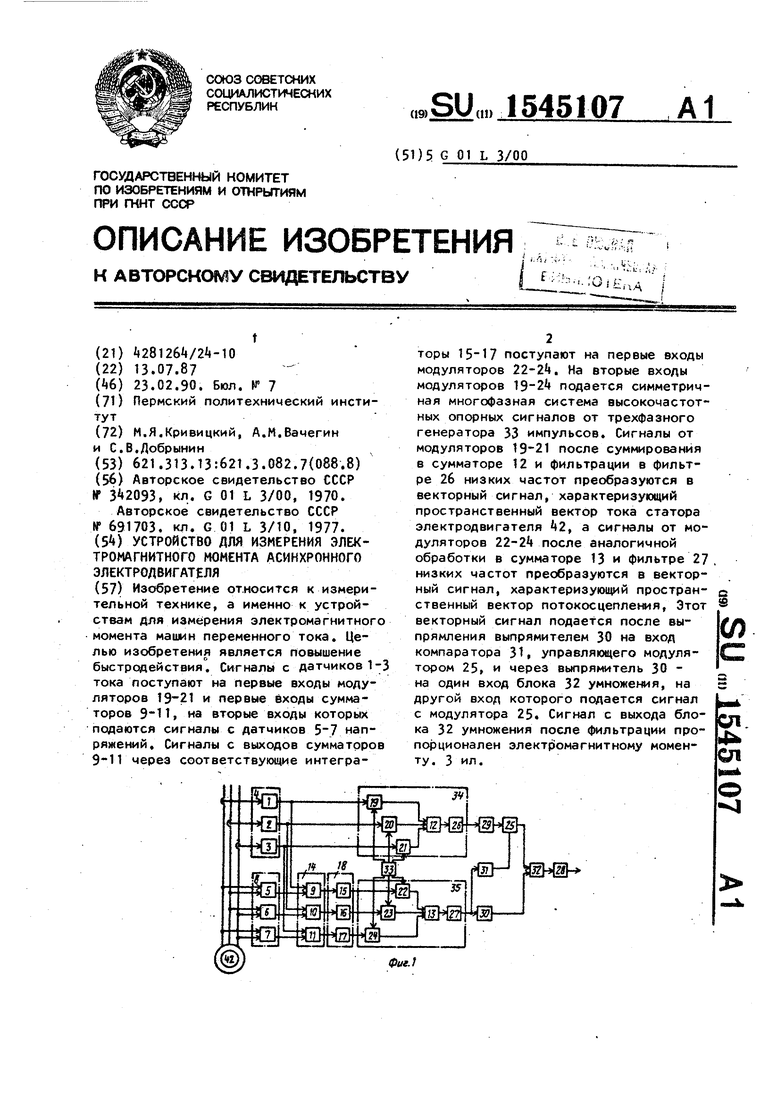
Фиг.
Изобретение относится к измери- tenbHon технике, а именно к устройствам для измерения электромагнитного момента машин переменного тока, и может быть использовано для измерения Электромагнитного момента в асинхронных электроприводах.
Целью изобретения является повы- щение быстродействия.
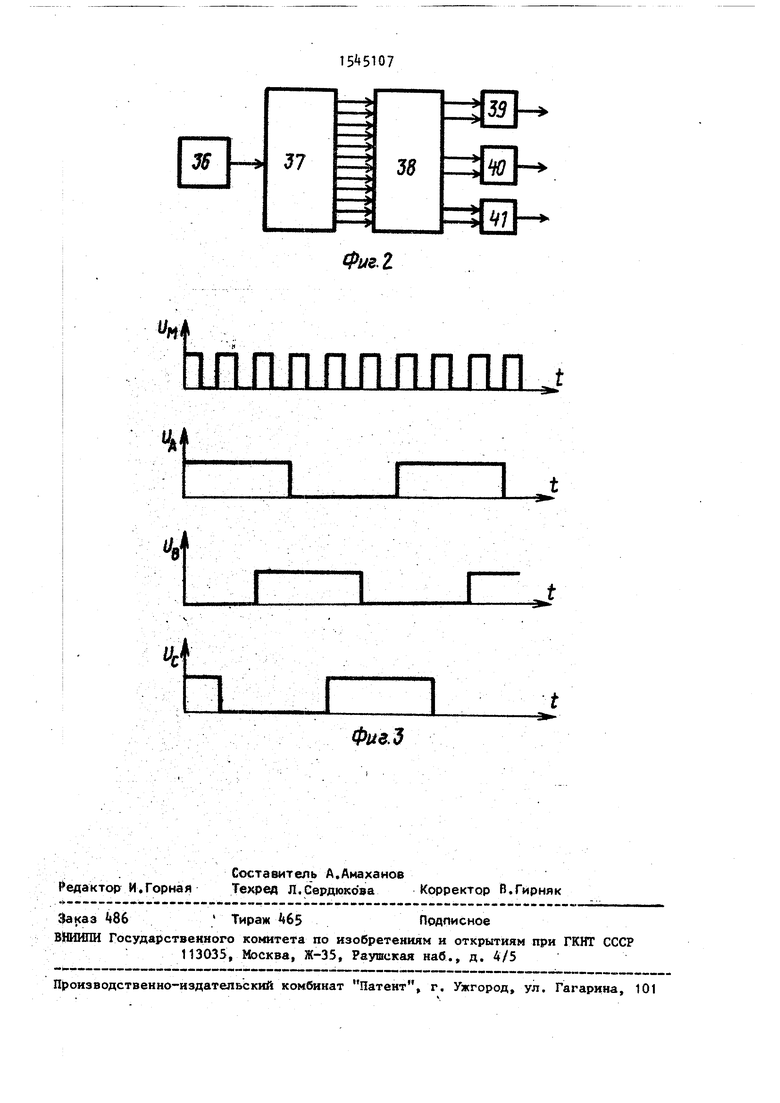
На фис.1 показана структурная схе- Ма предлагаемого устройства; на фиг.2 - структурная схема трехфазно- fo генератора импульсов; на фиг.3 - временные диаграммы импульсов на вы- кодах генератора.
Устройство для измерения электромагнитного момента асинхронных электродвигателей содержит три датчика 1-3 тока, объединенные в блок Ц датчиков тока, три датчика напряжения, объединенные в блок 8 датчиков напряжения, пять сумматоров , первые три из которых объединены в блок И сумматоров, три интегратора , объединенные 8 блок 18 интеграторов, семь модуляторов 19-25, три фильтра 26-28 низких частот, фазо- .смещающий блок 29, выпрямитель 30, компаратор 31, блок 32 умножения и трехфазный генератор 33 импульсов.
Сумматор 12, модуляторы 19-21 и фильтр 26 низких частот образуют первый блок 3 формирования пространственных векторов, а второй блок 35 I формирования пространственных векто- 1 ров образуют сумматор 13, модуляторы и фильтр 27 низких частот.
Трехфазный генератор 33 импульсов (фиг.2) включает мультивибратор 36, счетчик 37 дешифратор 38 и триггеры .
Устройство работает следующим образом
Датчики тока и напряжений подключают к соответствующим фазным цепям питания исследуемого асинхронного электродвигателя k2. I
На первые входы модуляторов 19-21 входящих в первый блок 3 формирова- ния пространственного вектора, с выхода блока k датчиков тока поступает многофазная система сигналов, несущих информацию о фаз,ных токах статора асинхронного электродвигателя 42: iA - I sintet -Ч);
Imsin(Qt у);
Lc lmsin(Qt -ц + 2Ј),
где
Q - угловая частота сети, с , Ц - фазовый угол, рад. На вторые входы модуляторов 19-21 с соответствующих выходов трехфазног генератора 33 импульсов поступает симметричная многофазная система высокочастотных опорных сигналов:
UA
иь и.
O 5
у - фазовый угол, рад. В результате амплитудной модуляции указанных опорных сигналов сигналами фазных токов, которая осуществляется модуляторами 19-21 блока 3 формирования пространственного вектора, на выходе модуляторов 19-21 возникает многофазная система высокочастотных сигналов, содержащих высшие гармоники. Сумматор 12 осуществляет суммирование указанных модулированных сигналов. После суммирования и фильтрации-высших гармоник, которая осуществляется 0 фильтром 26 на выходе блока 4 формирования пространственного вектора возникает сигнал, характеризующий пространственный вектор тока статора:
Ve8(°-ft)t +lf Л- Формирование пространственного вектора потокосцепления статора осуществляется в блоке 35. При этом сигналы с выходов блока k датчиков тока и с выходов блоков 8 датчиков напря - жения поступают на соответствующие входы блока 1 сумматоров, который осуществляет пофазное суммирование указанных сигналов по формулам 1д - UA - R,iA; 1. UR - R,i
5
0
5
Or
R,ic
где R. - сопротивление фазы статора
электродвигателя 42. На выходе блока сумматоров возникает многофазная система сигналов, характеризующих фазное ЭДС статора: 1А E cosfet - об );
L6
m Emcos(at -oi - I);
EMcos(Slt - «i + |ТО ,
где oi, - фазовый угол, рад.
Для получения фазных потокосцепле- ний статора указанная многофазная система сигналов интегрируется блоком 18 интеграторов
-t);
- «intet sin(Qt -«i
2
3);
+ 5в),
-Ј sinoat -oi
Полученный многофазный сигнал поступает на первые входы модуляторов 22-2k блока 35 формирования простран- $ ственногр вектора, на вторые входы которых поступает симметричная мно- . гофаЗная система опорных сигналов с соответствующих выходов трехфазного генератора 33 импульсов. Работа блока 35 аналогична работе блока На выходе блока 35 формирования пространственного вектора образуется сигнал
г 6
Фильтр 28 низкой частоты выделяет из этого сигнала постоянную составляющую, которая и несет информацию об электромагнитном моменте асинхронного электродвигателя.
Формула изобретения
20
Устройство для измерения электромагнитного момента асинхронного электродвигателя, содержащее три датчика тока, три датчика напряжения, три сумматора, интегратора и фильтра низких частот, причем выход каждого ин- тегратора подключен к выходу соответствующего сумматора, к одному входу каждого из которых подключен соответствующий датчик тока, а к второму входу - соответствующий датчик напряжения, отличающееся тем, что, с целью повышения быстродействия, в него введены два дополнительных :v сигналы, характеризующие соответствен- 30 сумматора, компаратор, фазосмещающий
V5- -5Ј-coe G -)t -If .
Векторный сигнал ц)5 с выхода блока 35 подается на входы выпрямителя 30 и компаратора 31, которые формируют
25
но модуль и фазу вектора у5.
Компаратор 31 сравнивает выходной сигнал с нулевым уровнем. Выходной сигнал компаратора 31, представляющий собой последовательность прямоугольных импульсов с фазовым соответствием сигналу на выходе блока 35, подается на один вход модулятора 25, на другой вход которого через фазосмещающий блок 29 (смещающий фазу проходного сигнала на угол Т/2) подается сигнал с выхода блока 3. На выходе модулятора 25 формируется сигнал, основная гармоника которого имеет вид
Ав--| Imsin(W-S2)t +lf
х cos(W-Si)t + + у | Imx
х sin(q -ci) + 1 Iwsinf 2(W -Ј)t + + q + oi + 2f.
Первое слагаемое представляет собой проекцию вектора is на ось, ортогональную вектору ф . Этот сигнал поступает на один вход блока 32 умножения, на второй вход которого подается сигнал с выхода выпрямителя, пропорциональный величине модуля (J . На выходе блока 32 умножения формируется сигнал, который, кроме постоянной
блок, выпрямитель, блок умножения, трехфазный генератор импульсов и семь модуляторов, первые три из которых подключены первыми входами к соответ35 ствующим датчикам тока, вторыми входами - к соответствующим выходам трехфазного генератора импульсов, а выходами - к соответствующим входам первого дополнительного сумматора,
40 выход которого через первый фильтр низких частот подключен к входу фазо- смещающего блока, четвертый, пятый и шестой модуляторы подключены первыми входами к выходам соответствующих
45 интеграторов, вторыми входами к соответствующим выходам трехфазного генератора импульсов, а выходами - к соответствующим входам второго дополнительного сумматора, выход которого
50 через второй фильтр низких частот подключен к входу компаратора и к входу выпрямителя, выход которого подключен к первому входу блока умножения, выход которого подключен к входу третьего фильтра низких частот,
55
а второй вход - к выходу седьмого модулятора, один вход которого подключен к выходу фазосмещающего блока, а другой - к выходу компаратора.
составляющей, содержит высокочастотную переменную составляющую
М
| ) -f
X COS
acu-sm + 2 у-ni +.
Фильтр 28 низкой частоты выделяет из этого сигнала постоянную составляющую, которая и несет информацию об электромагнитном моменте асинхронного электродвигателя.
Формула изобретения
$
20
30
30
25
блок, выпрямитель, блок умножения, трехфазный генератор импульсов и семь модуляторов, первые три из которых подключены первыми входами к соответ5 ствующим датчикам тока, вторыми входами - к соответствующим выходам трехфазного генератора импульсов, а выходами - к соответствующим входам первого дополнительного сумматора,
0 выход которого через первый фильтр низких частот подключен к входу фазо- смещающего блока, четвертый, пятый и шестой модуляторы подключены первыми входами к выходам соответствующих
5 интеграторов, вторыми входами к соответствующим выходам трехфазного генератора импульсов, а выходами - к соответствующим входам второго дополнительного сумматора, выход которого
0 через второй фильтр низких частот подключен к входу компаратора и к входу выпрямителя, выход которого подключен к первому входу блока умножения, выход которого подключен к входу третьего фильтра низких частот,
5
а второй вход - к выходу седьмого модулятора, один вход которого подключен к выходу фазосмещающего блока, а другой - к выходу компаратора.
Фю.1
Ьппппппппп t
п
Фи&З
