Изобретение относится к электротехнике и может быть использовано в электроприводе с короткозамкнутым асинхронным двигателем и тиристорным преобразователем, позволяющим одновременно управлять амплитудой и частотой выходного напряжения (тока) .
Известно устройство для управления асинхронным короткозамкнутым двигателем с непосредственньлм преобразователем частоты, СИФУ которого управляется от статического задатчика напряжения и частоты (ЗСЙЧ), на выходе которого образуется система трехфазного напряжения низкой частоты. На входе ЗСНЧ имеет два независимых канала управления частотой и амплитудой выходного напряжения. Сигнал на управление амплитудой подается с выхода пропорционгшьного регулятора скорости. Сигнгш на управление частотой выходного напряжения подается с выхода сумматора, на входы которого приходят сигналы с датчика скорости и выхода функционального преобразователя, вход которого соединен с указанным пропор1у1ональным регулятором скорости 1
Недостатком этого устройства является наличие сложного цифро-аналогового устройства, Зсщсцощего амплитуду и частоту выходного напряжения.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для управления асинхронным короткоТОзамкнутым электродвигателем, содержащее тиристорный преобразователь, силовой вход которого снабжен выводами для подключения к сети, а выход через датчики фазных токов сое15динен с обмоткой статора, датчик частоты вращения электродвигателя, три элемента сравнения, блок задания частоты вращения, выход которого соединен содним из входов перво20го элемента сравнения, второй вход которого соединен с выходом датчика частоты вращения электродвигателя, преобразователь трехфазного напряжения в двухфазное, вход которого
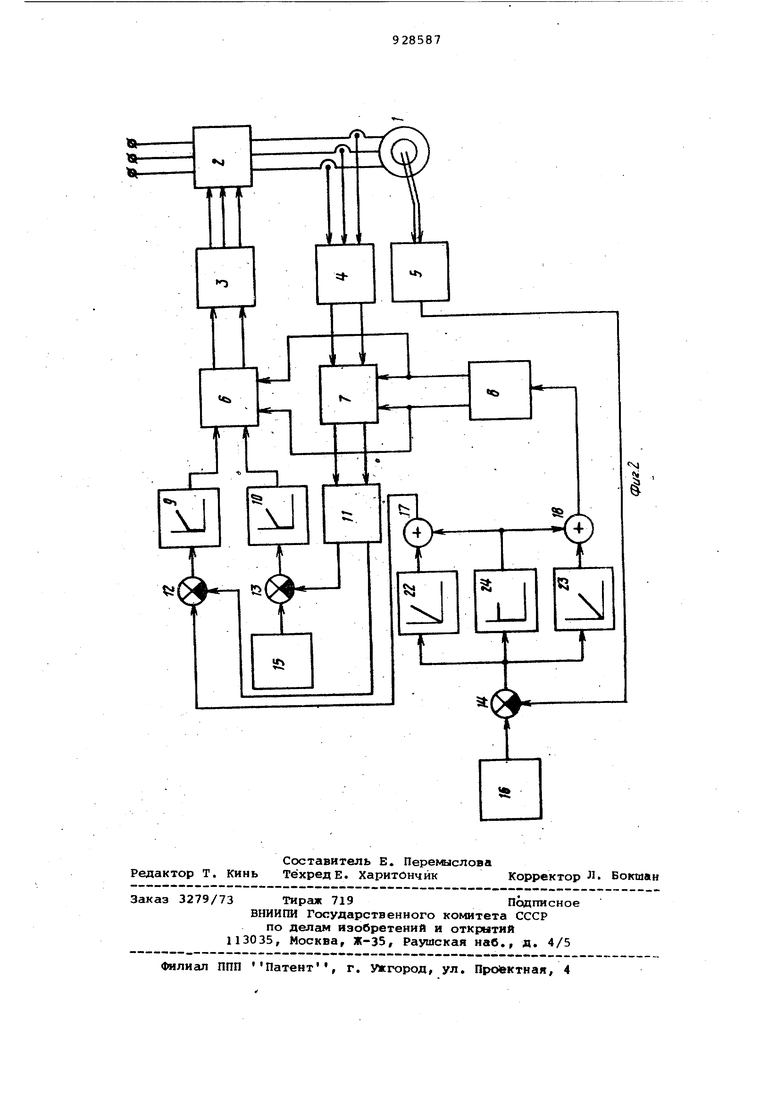
25 соединен с датчиками фазных токов, а выход - со входом преобразователя напряжения из неподвижной во вращающуюся систему координат, выход которого соединен со входом фазорегуля30тора, выходы которого соединены с одним1{ из входов второго и третьего элементов сравнения, блок задания магнитного потока, выход которого соединен с другим входом второго элемента сравнения, два пропорционально-интегральных регулятора, входы которых соединены соответст; Ченно с выхода1«и второго и третьего элементов сравнения, а выходы - со входом преобразователя напряжения из вращающейся в неподвижную систему координат, выход которого через преобразователь двухфазного напряжения в трехфазное соединен с управляющим входом тиристорного преобразователя, опорные входы преобра зователей напряжения из неподвижной во вращающуюся систему координат и наоборот соединены с выходом генера тора опорных синусоидальных колебаний 2 . Недостатком этого устройства является наличие цифроанешогового бло ка для вычисления скольжения, устройство которого соизмеримо по слож ности аппаратурной реализации со всей остальной частью регулятора, что снижает нгщежность электроприво да, хотя при этом обеспечиваются технически оптимальные переходные процессы и высокая точность поддержания переменных в установившемся режиме. Целью изобретения является повышение надежности устройства. Указанная цель достигается тем, что в известное устройство для.управления асинхронным короткрзамкнутым электродвигателем введены два сумматора, два интегральных и пропорциональный регуляторы, входы которых объединены и соединены с выходом первого элемента сравнения, выходы, интегральных регуляторов сое динены соответственно с одними из входов сумматоров, другие звходы которых соединены с выходом пропорцио нального регулятора, выход одного из сумматоров соединен со входом ге нератора опорных синусоидальных колебаний, а выход другого сумматора соединен с другим входом третьего элемента сравнения. Указанная цель также достигается вторым вариантом вь1полнения устройства, согласно которому в известное устройство для управления асинхронным короткозамкнутым электродвигателем введены два сумматора, два пропорциональных и интегральный рег ляторы, входы которых объединены и соединены с выходом первого элемент с.равнения, выходы пропорциональных регуляторов соединены соответственно с одними из входов сумматоров, другие входы которых соединены с вы ходом интегрального регулятора, выход одного из сумматоров соединен со входом генератора синусоидальных колебаний, а выход другого сумматора соединен с другим входом третьего элемента сравнения. На фиг.1 и 2 представлены блоксхемы первого и второго вариантов устройства. устройство содержит асинхронный электродвигатель 1, присоединенный к тиристорному преобразователю 2, Преобразователь двухфазного напряжения в трехфазное 3 и наоборот 4, датчик частоты вращения 5 электродвигателя и датчики фазных токов статора двигателя, преобразователи напряжения из вращающейся в неподвижную систему координат б и наоборот 7, присоединенные к генератору опорных синусоидальных колебаний 8, пропорционально-интегральные регуляторы 9 и 10 в каждом из двух указанных каналов, фазорегулятор 11, элемент сравнения 12. Задающие входы элементов сравнения 13 и 14 подключены соответственно к выходам блока задатчика магнитного потока 15 и блока задания частоты вращения 1б, а вторые входы упомянутых элементов сравнения 12 - 14 являются входами обратных связей, присоединяемых соответственно к выходам фазорегулятора 11 и выходу датчика скорости 5. Одни входы сушлаторов 1 и 18 соединены с интегральными регуляторами 19 и 20, а пропорциональный регулятор 21 выходом соединен с другими входами сумматоров 17 и 18. В представленном на фиг. 2 втором варианте одни входы сумматоров 17 и 18 соединены с пропорциональными регуляторами 22 и 23, а интегральный регулятор 24 выходом соединен с другими входами сумматоров 17 и 18. Устройство функционирует следующим образом. В установившемся режиме холостого хода при любой скорости вращения, в том числе и равной нулю, фазорегулятором 11 моментообразующая составляющая 1д тока статора i сводится к нулю, при этом к6ррек1;ируется величина намагничивающей составляющей 1 указанным фазорегулятором и уточняется уставкой IM с выхода задатчика магнитного потока 15 до величины номинального тока холостого хода двигателя 1. Таким образом, осуществляется ориентещия объекта по вектору тока холостого хода или с точностью до учета активной составляющей тока холостого хода осуществляется ориентащия объекта по вектору тока намагничивания,, совпадающему по фазе с вектором потокосцепления зазора. В(з9ставляются величины коэффициентов передачи в интегральных и пропорциональных регуляторах 9, 10, 19, 20 и 21 для первого вариан устройства и в регуляторах 9, 10, 22, 23 и 24 для второго варианта устройства такие, которые необходи для обеспечения автономности канал намагничивания и моментообразовани а также обеспечивают качество пере ходных и точность установившихся режимов. Это проверяет по реакции системы электропривода на единичны возмущения со стороны вала ротора и питающей сети. После подачи напряжения на обмо ки статора электродвигателя 1 напр жения через тиристорный преобраэова тель 2 начинают поступать сигналы с датчиков фазных токов через преобр1азователь 4, преобразователь напряжения 7, фазорегулятор 11 на входы элементов сравнения 12 и 13 регуляторов 9 и 10 проекции тока с тора. С выходов регуляторов 9 и Ю сигналы поступают на управляющие входы тиристорного преобразователя через преобразователь координат 6 П 2. Намагничивающая составляющая тока статора формируется от уставки с выхода блока 15, а активная соетавляющая - с выхода сумматора 1. Частота вращения ротора электродвигателя задается блоком 16 и отележивается датчиком скорости 5, при этом сигнал с выхода сумматора 18 подается на вход генератора 8 синусоидальных колебаний, которилй задает опорные синусоиды для работы преобразователей 6 и 7. При этом канал формирования активной составляющей является автономным по отношению к каналу формирования намагничивающей составляющей тока статора. Динамические свойства системы достигаются за счет автономности каналов управления, а также за счет применения регуляторов 9, Ю, 19, 20 и 21 для первого варианта устрой ства и 9, 10, 22, 23 и 24 для второ го варианта устройства блоков устройства по принципу подчиненного регулирования. Для обеспечения заданных динамических свойств электро привода при различных характерах нагрузки на валу предусмотрены два варианта выполнения устройства. Формула изобретения 1. устройство для управления асинхронным короткозамкнутым электр двигателем, содержащее тиристорный преобразователь, силовой вход которого снабжен.выводами для псдключения к сети, а выход через датчики фазных токов соединен с обмоткой статора, датчик частоты вращения электродвигателя, три элемента орав Иения, блок задания частоты вращения, выход которого соединен с одним из входов первого элемента сравнения, второй вход которого соединен с выходом датчика частоты вращения электродвигателя, преобразователь трехфазного напряжения в двухфазное, вход которого соединен с датчиками фазных токов, а выход - со входом преобразователя напряжения из неподвижной во вращакщуюся систему координат, выход которого соединен со входом фазорегулятора, выходы которого соединены с одними из входов второго и третьего элементов сравнения, блок задания магнитного потока, выход которого соединен с другим входом второго элемента сравнения, два пропорционально-интегральных регулятора, входы которых соединены соответственно с выходами второго и. третьего элементов сравнения, а выходы - со входом преобразователя напряжения из вращающейся в неподвижную систему координат, выход которого через преобразователь двухфазного напряжения в трехфазное соединен с управляющим входом тиристорного преобразователя, опорные входы преобразователей напряжения из неподвижной во вращающуюся систему координат и наоборот соединены с выходом генератора опорных синусоидальных колебаний, о т ли ч а ющ е е с я тем, что, с целью повышения надежности, в него введены два сумматора, два интегральных и пропорциональный регуляторы, входы которых объединены и соединены с выходом первого элемента сравнения, выходы интегральных регуляторов соединены соответственно с одними из входов сумматоров, другие входы которых соединены с выходом пропорционального регулятора, выход одного из сумматоров соединен со входом генератора опорных- синусоидальных колебаний, а выкод другого сумматора соединен с другим входом третьего элемента сравнения. 2. Устрюйство для управления асинхронным короткозамкнутым электродвигателем содержащее тиристорный преобразователь, силовой вход которого снабжен выводами для подключения к сети, а выход через датчики фазных токов соединен с обмоткой статора/ датчик частоты вращения электродвигателя, три элемента сравнения, блок Зсщания Частоты вращения, выход которого соединен с одним Из входов первого элемента сравнения, второй вход которого соединен с Выходом датчика частоты вращения электродвигателя, преобразователь трехфазного напряжения в двухфазное, вход которого соединен с датчиками 11)аэных токов, а выход со входом преобразователя напряжения из неподвижной во вращающуюся систему координат, выход которого соединен со входом фазорегулятора, выхода которого соединены с одними из |ходов второго и третьего элементов сравнения, блок задания магнитного пЬтока, выход которого соединен с рругим входом второго элемента сравИения, два пропорционально-интеграль ых регулятора, входы которых соединены соответственно с выходами второго и третьего элементов срав нения, а выходы - со входом преобразователя напряжения из вращающейся в неподвижную систему координат, выход которого через преобразователь двухфазного напряжения в трехфазное соединен с управляющим входом тиристорного преобразователя, опорные входы преобразователей напряжения 1из неподвижной во вращающуюся систему координат и наоборот соединены с выходом генератора опорных синусоидальных колебаний, отличающееся тем, что, с целью повышения надежности, в него введены два сумматора, два пропорциональных и интегральный регуляторы, входы которых объединены и соединены с выходом первого элемента сравнения, выходы пропорциональных регуляторов соединены соответственно с одними из входов сумматоров, другие входы
которых соединены с выходом интегрального регулятора, выход одного из сумматоров соединен со входом генератора опорных синусоидальных колебаний, а выход другого сумматора
соединен с другим входом третьего элемента сравнения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 529537, кл. Н 02 Р 7/42, 1973.
2. Авторское свидетельство СССР № 612375, кл. Н 02 Р 7/42, 1975.

- ф
