По осиовному ает. ов. № 128677 И31вестбн механизм привода иожа нооилоч«ых аппаратов, 10 которых воввратно-поступательное движение Ножу сообщается илаветареьгм мехаНИЗмом, состоящим из двух щестерен - малой, с наружным зацеплением, и большой, с внутренним зацеплени ем, при этом ось пальца кривюШИпа головки иожа является продолжеиием образующих окружности малой шестерни. В указанном меха1низме лривода достоинством планетарного механизма является отсутствие неуравновешенных центробежных мо:менто1в инерции, т. е. он динамически уравно1вешвн.
Однако, в соединении с ножом косилки этот механизм образует динамически неуравновешенную систему, так как силы инерции движущегося ножа остаются неуравновешенными и растут нропорщиОнально квадрату числа двойных ходов Ножа, что в итоге приводит к раз(рушению устройства.
В предлагаемом механизме привода ножа КОСИЛОЧНЫХ алпаратов с целью уравновешивания инерционных сил ножа на пальце кривошила установлен противовес, выполненный в виде ползуна, связанного через двуплечий рычаг с головкой ножа.
ханизма привода и имеет самоустанавливающиеся опоры.
С целью точной подгонки веса движущихся Maioc ползун имеет гнездо с наборо м шайб.
Двуплечий рычаг выполнен с прорезями в местах соединения его с ползуном и головкой ножа.
Для обеспечения движения пальца кривошипа параллельно движению ножа косилки большая шестерня установлена в корпусе с возможностью поворота и снабжена унором для регулировочных болтов, фиксирующих угловое положение шестерни.
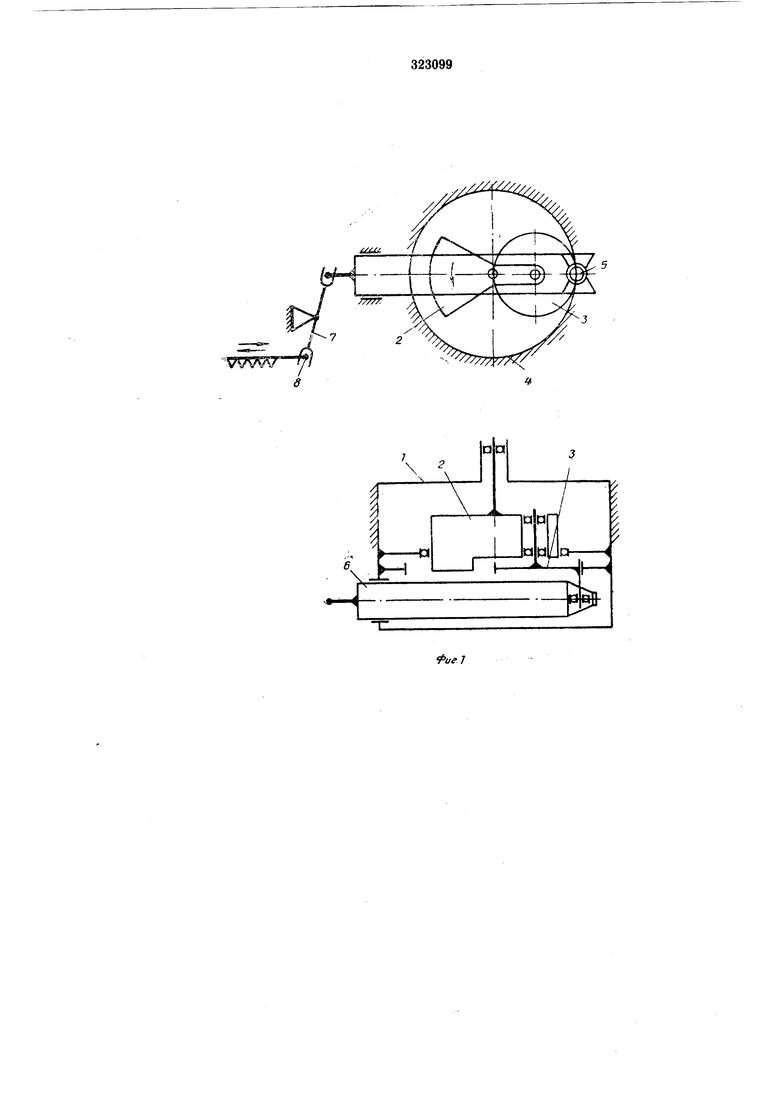
На фиг. 1 схематично изображен предлагаемый механизм привода, «ид обоку и сверху;
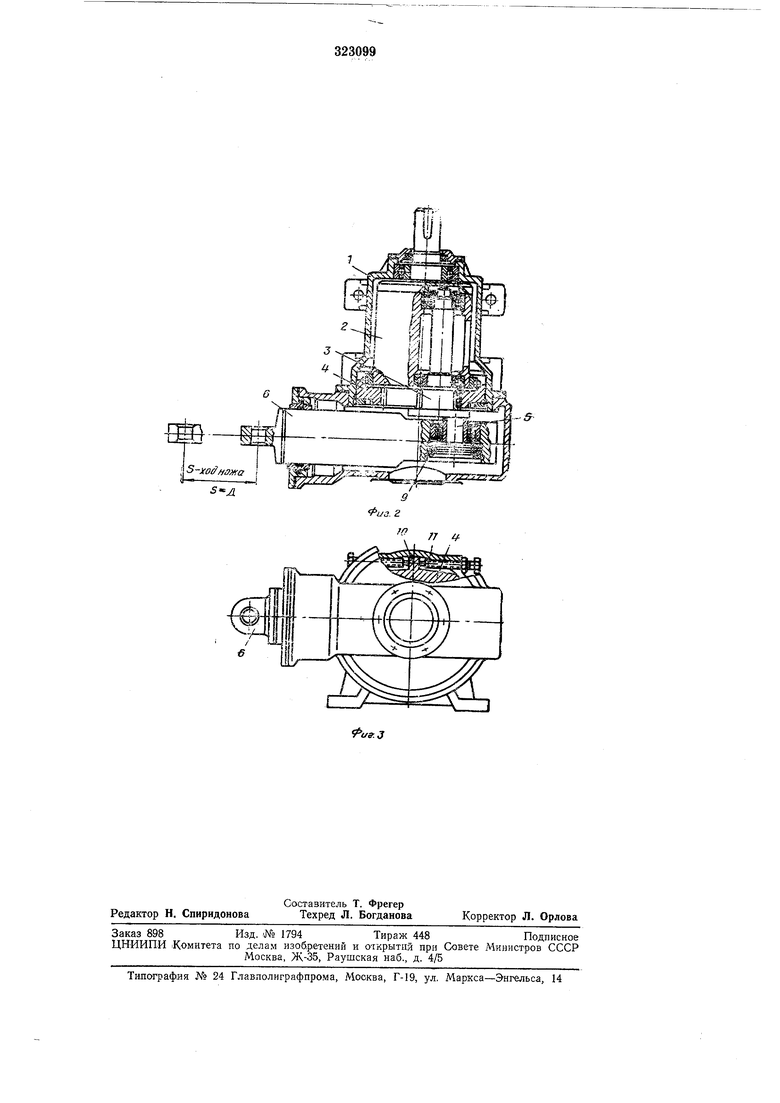
на фиг. 2 - то же, продольный разрез, вид
сверху; на фиг. 3 - то же, продольный разрез,
вид сбоку.
Предлагаемый механизм привода ножа ко силочных алпаратов размещен в корпусе 1 и состоит из планетарного механизма, у которого вращающееся в подшипниках водило 2 выполнено так, что в нем на двух подшипниках размещается кривошипный вал - малая шестерня 3, чья ось смещена относительно оси водила.
iTOiporo йвляется Продолженивм образующей цилиндра началыной окружщости шестерни. На пальце 5 вала устанавливается на самоустанавлйвающемся ;подшит ике иротивовес, вы1юл:нен«ый в Виде лолзуна 6, вторая опора которого тоже самоустаиавливающаяся. Ползун 6 овязан через двуплечий |рычаг 7 с головкой ножа 8 и имеет гнездо с иабором шайб 9 для изменения массы противовеса. Двуплечий рычат 7 выполнен с строрезями в местах соёдииения его ic ползуно-м и головкой «ожа. Водило 2 в сборе динамически сбалатасировало, при этом масса пальца 5 не учтена, так как оя совершает возв1ратно-пост таательное движение и его масса входит в общую массу толзуна-проТ1ив1овеса.
Большая шестерня 4 установлена в корпусе с возможностью поворота и снабжена упором 10 для регулировочных болтов 11, фиксирующих угловое положение шестерни.
Механиз-м привода ножа косилочных аппаратов работает следующим образом.
вращении вод1ила 2 лалец 5 кривошипа, сочетая движение вокруг оси кривошипного вала - зубчатое зацепление IH, вместе с кривошипным валом, - BOiKpjT оси водила, -получает вращательное дв1ижен1ие вокруг собственной оси и совершает прямолинейное возвратно-1поступатель1ное движение, приводя ;в действие ползун-.против овес 6, от которого через двуплечий рычаг 7 приводится нож 8. Поскольку ползун-противовес и «ож режущего
аппарата имеют од1ина овые вес и скорость движения 1и движутся в противоположные стороны, то ценггр масс системы ползун - иож Не меняет своих координат, и система наход1ится в динамическом равновесии.
Предмет изобретения
1. Механизм привода но-жа косилочных аапаратов по авт. св. № 128677, отличающийся тем, что, с целью уравновешивания инерционных сил ножа, на пальце кривошипа установлен противовес, выполненный в виде по-лзуна,
связанного через двуплечий рычаг с Головкой ножа.
2.М-еханизм привода по п. 1, отличающийся тем, что ползун размещен в корпусе механизма и имеет самоустанавливающиеся
опоры.
3.Механизм привода по п. 1, отличающийся тем, что ползун имеет гнездо с набором шайб для изменения массы противовеса.
4.Механизм привода по п. 1, отличающийся тем, что двуплечий рычаг выполнен с прорезями в местах соединения его с ползуном 1И головкой ножа.
5.Механизм привода по п. 1, отличающийся тем, что большая шестерня установлена в корпусе с возможностью поворота и снабжена упором для регулировоЧ(Ных болтов, фиксирующих угловое положение шестерни.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм привода ножа косилочных аппаратов | 1959 |
|
SU128677A1 |
| Вертикальный кривошипный пресс-автомат | 1988 |
|
SU1523398A1 |
| РУЧНОЙ ИНСТРУМЕНТ ДЛЯ РАСПИЛОВКИ ПРЕИМУЩЕСТВЕННО МЯСНЫХ ТУШ | 1996 |
|
RU2107438C1 |
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 2002 |
|
RU2206196C1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Автомат для изготовления волнистых пружинных шайб | 1977 |
|
SU657896A1 |
| Привод ножа режущего аппарата | 1987 |
|
SU1496681A1 |
| РЕЖУЩИЙ АППАРАТ ДЛЯ САМОХОДНОЙ УБОРОЧНОЙ МАШИНЫ | 2013 |
|
RU2626946C2 |
| Пресс-автомат для обработки длинномерного материала | 1987 |
|
SU1442298A1 |
5«л
П ff
