Изобретение относится к области контрольно-измерительной техники, в частности к датчикам давления с индукционным преобразователем перемещения.
Известные датчики разности давлений, содержащие упругий чувствительный элемент и индукционный преобразователь перемещения, имеют отклонения выходных характеристик, обусловленные главным образо.м технологическим разбросом характеристик упругих чувствительных элементов и индукционных преобразователей перемещения.
Кроме того, известные датчики имеют невысокую крутизну выходной характеристики.
В описываемом датчике с целью устранения систематических погрещностей датчика, связанных с технологией изготовления, толщины симметричных периферийных секций магнитопроводов статора и ротора относятся к толщине центральных секций, как числа натурального ряда, а в каждом слое магнитопровода статора симметрично размещены по Д)ве трехзубые секции. При этом секции, расположенные в смежных слоях, смещены одна относительно другой яа 90°.
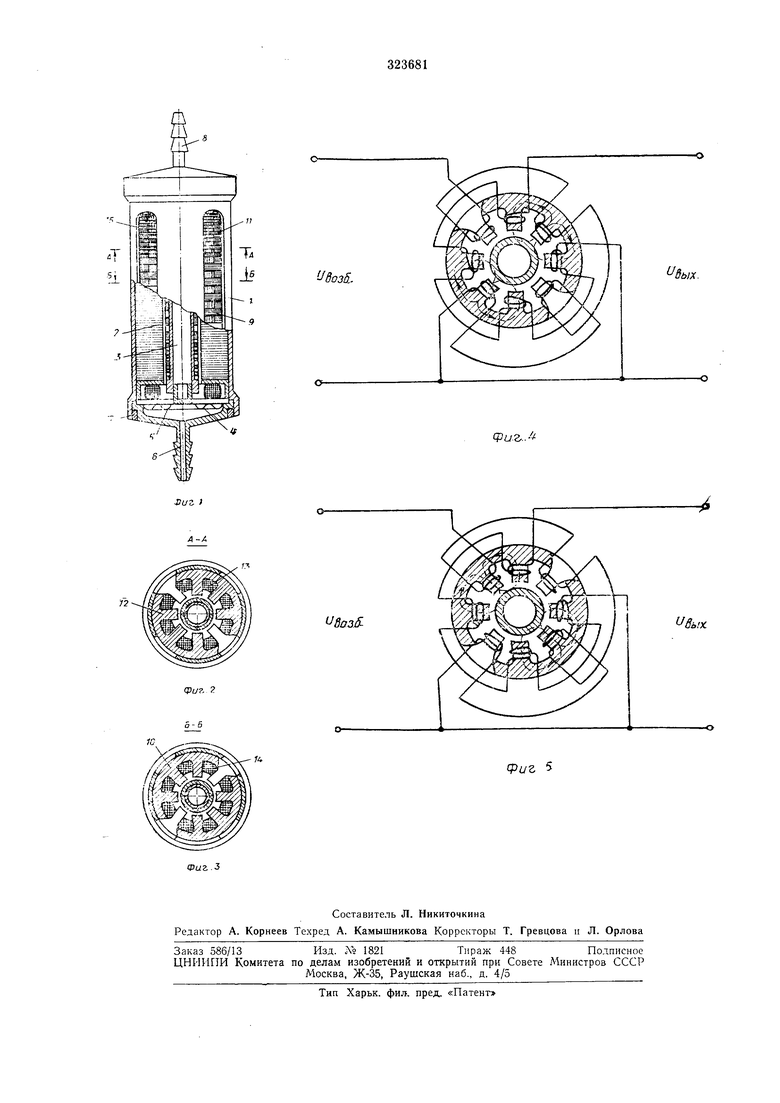
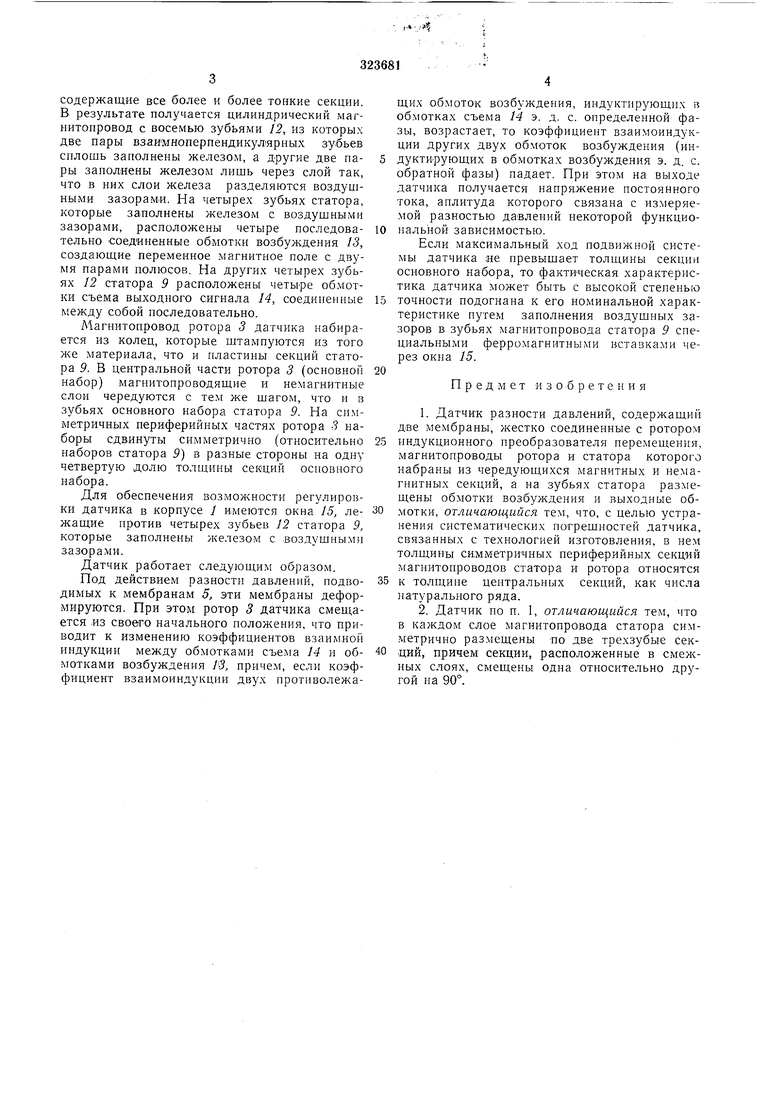
На фит. 1 представлена конструктивная схема предлагаемого датчика; на фиг. 2 - разрез по А-Л на фиг. 1; на фиг. 3 - разрез по Б-Б на фиг. I; на фиг. 4 и 5 - принципиальная схема датчика и распределение
|магннт1 ых потоков в его магнитопроводах при двух положениях ротора (при пулево.м и максимальном смещениях).
Датчик состоит из корпуса /, в котором закреплен индукционный преобразователь перемещения 2. Ротор 3 последнего жестко соединен с жесткими центрами 4 ме.мбран 5, которые вварены в коробки 6, закрепленные в корпусе / гайками 7 и снабженные щтуцерами 8 для подвода измеряемых давлений. Mai-нитопровод статора 9 индукционного преобразователя перемещения 2 набирается из огдельных трехзубых секциГ W, склеенных из ;пластин // трансфорМаторного железа толщиной 0,08-0,2 Л1М.
Для сборки магнитопровода статора используются несколько (четыре-пять) групп секций 10, толщина которых равна 1/2; 1/3; 1/4, 1/5 ... толщины секций основного набора, составляющего центральную часть магнитопровода.
В каждом слое магнитопровода статора 9 симметрично расположены две одинаковые секции, а секции, располагаемые в любых двух смежных слоях магнитопровода,развернуты на 90°. Пентральная часть магнитопровода статора 9 (основной набор) содержит четное число слоев и набирается изсекцнй максимальной толщины. К периферии статора 9 симметрично (с обеих сторон) набираются участки.
содержащие все более и более тонкие секции. В результате получается цилиндрический магнитоировод с восемью зубьями 12, из которых две пары взаи-мноперпендикуляриых зу-бьев силошь заиолнеиы железом, а другие две иары заполнены железом лишь через слой так, что в них слои железа разделяются воздушными зазорами. На четырех зубьях статора, которые заполнены железом с воздушными зазорами, расположены четыре последовательно соединенные обмотки возбуждения 13, создаюш;ие переменное магнитное поле с двумя парами полюсов. На других четырех зубьях 12 статора 9 расположены четыре обмотки съема выходного сигнала 14, соединенные между собой последовательно.
Магнитопровод ротора 3 датчика набирается из колеп, которые штампуются из того же материала, что и пластины секций статора 9. В центральной части ротора 3 (основной набор) магнитопроводяшие и немагнитные слои чередуются с тем же шагом, что и в зубьях основного набора статора 9. На си.мметричных периферийных частях ротора 3 наборы сдвинуты симметрично (относительно наборов статора 9) в разные стороны на одну четвертую долю толщины секций основного набора.
Для обеспечения возможности регулировки датчика в корпусе / имеются окна 15, лежащие против четырех зубьев 12 статора 9, которые заполнены железом с воздушными зазорами.
Датчик работает следующим образом.
Под действием разности давлений, подводимых к мембранам 5, эти мембраны деформируются. При этом ротор 3 датчика смещается из своего начального положения, что приводит к изменению коэффициентов взаимной индукции между обмотками съема 14 и обмотками возбуждения 13, нричем, если коэффициент взаимоиндукции двух противолежащих обмоток возбу дения, индуктирующих в обмотках съема 14 э. д. с. определенной фазы, возрастает, то коэффициент взаимоиндукции других двух обмоток возбуждения (иидуктирующих в обмотках возбуждения э. д. с. обратной фазы) падает. При этом на выходе датчика получается напряжение постоянного тока, аплитуда которого связана с измеряемой разностью давлений некоторой функциональной зависимостью.
Если максимальнь й ход подвижной системы датчика яе превышает толщины секции основного набора, то фактическая характеристика датчика может быть с высокой степенью
точности подогнана к его номинальной характеристике путем заполнения воздушных зазоров в зубьях магнитопровода статора 9 специальными ферромагнитными вставками через окна 15.
Предмет и з о б р е т е и и я
1.Датчик разности давлений, содержаший две мембраны, жестко соединенные с ротором
индукционного преобразователя перемещения, магнитопроводы ротора и статора которого набраны из чередующихся магнитных и немагнитных секций, а на зубьях статора размещены обмотки возбуждения и .выходные обмотки, отличающийся тем, что, с целью устранения систематических погрещностей датчика, связанных с технологией изготовления, в нем толщины симметричных периферийных секций магнитопроводов статора и ротора относятся к толщиие цеитральных секций, как числа натуральрюго ряда.
2.Датчик по п. 1, отличающийся тем, что в каждом слое магнитопровода статора симметрично размещены по две трехзубые секдий, причем секции, расположенные в смежных слоях, смещены одна относительно другой на 90°.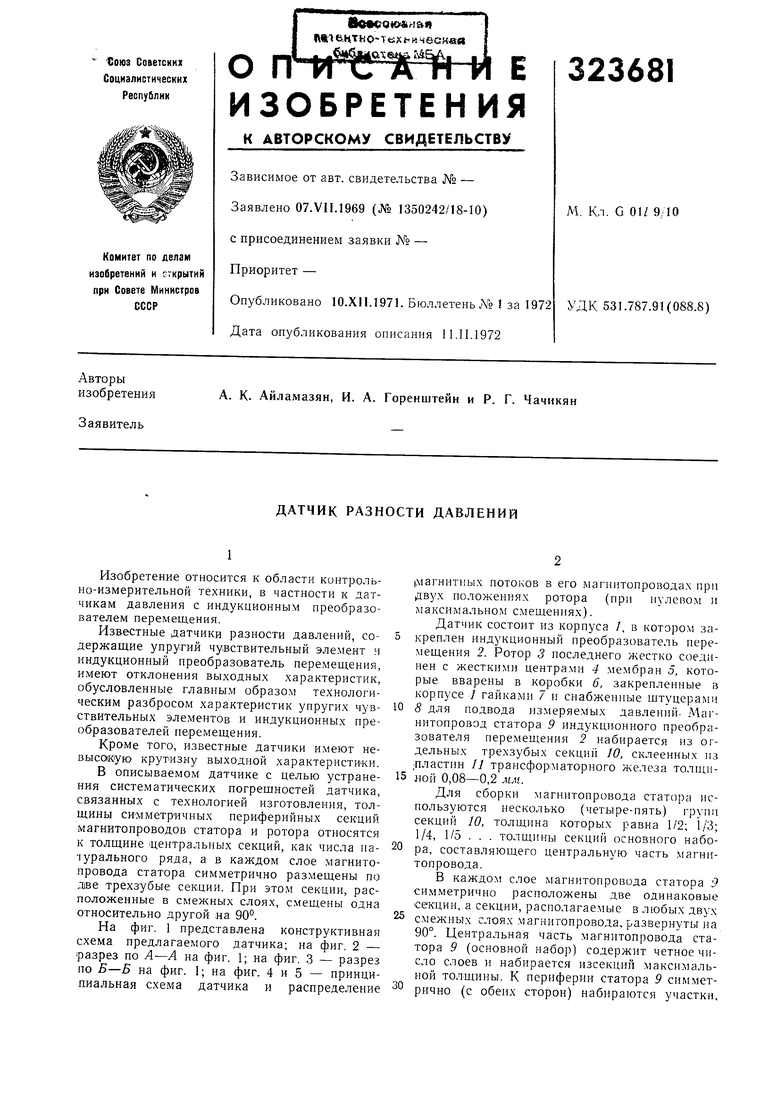
| название | год | авторы | номер документа |
|---|---|---|---|
| Индукционный датчик | 1979 |
|
SU845233A1 |
| Преобразователь угла рассогласования валов в напряжение | 1986 |
|
SU1336068A1 |
| Вентильный электродвигатель | 1981 |
|
SU964884A1 |
| Асинхронная машина | 2024 |
|
RU2833017C1 |
| Многополюсный преобразователь угла поворота вала в фазу электрического сигнала | 1981 |
|
SU998863A1 |
| ИНДУКЦИОННЫЙ ЭЛЕКТРОМАШИННЫЙ ФАЗОВРАЩАТЕЛЬ | 1973 |
|
SU387485A1 |
| Многополюсный вращающийся трансформатор | 1976 |
|
SU653692A1 |
| ИНДУКЦИОННЫЙ ФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ С КОМПЕНСАЦИЕЙ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ | 1970 |
|
SU274203A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |