Иэвестиы многопозициониые автоматы, на KiOTOpHx перемещеиие заготовок с исходных позии,ий -на рабочие, размещенные на двух концентрично расноложенных условных окружностях, осуществляется загрузочным устройством, выполненным в виде нланетарного механизма.
Предлагае1мый .автомат отличается тем, что он вьвполиен ев виде двух нетодвижнЫХ дисков с исходными и рабочи ми позициями, между которыми в кольцеобразном водиле па осях сателлитов планетарного механизма раоиоложены резаки -с прижимами, движущиеся .при |В1ращении водила по эпициклоиде.
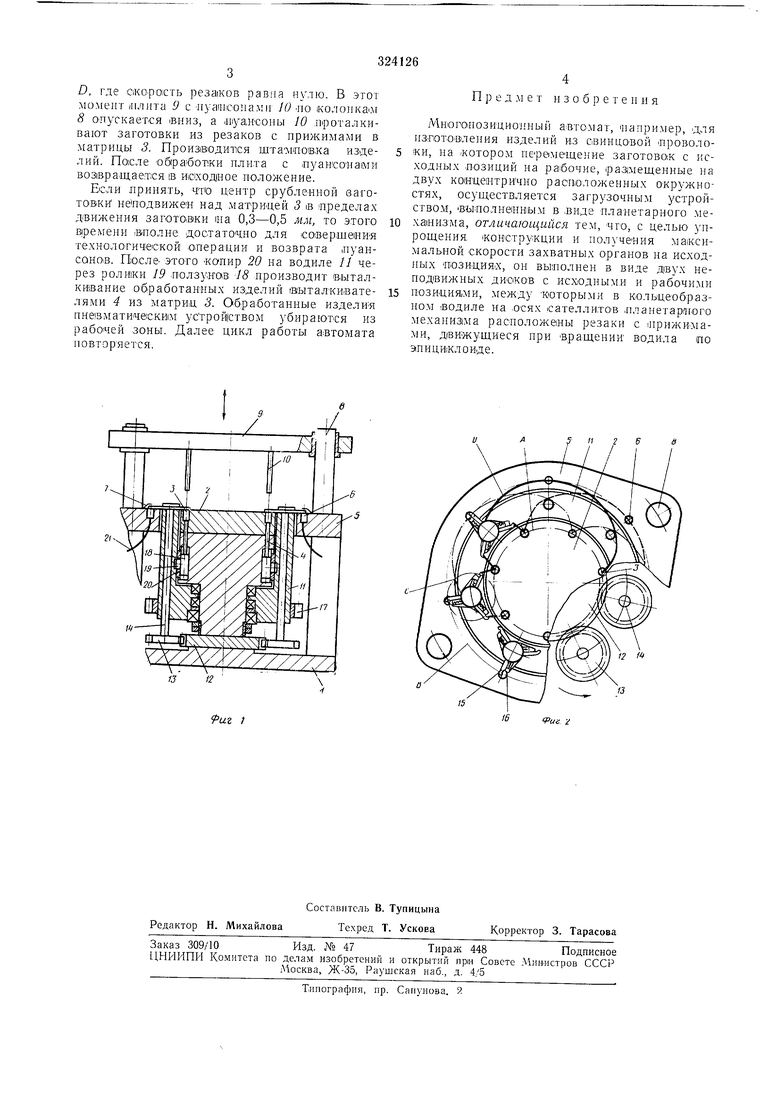
На фиг. 1 И 2 показ ан опиоьгваемый aiBTOМат в Д1вух проекциях.
Автомат содержит станииу /, на которой укреплен иеподвижпый диск 2 с рабочими позициями - матрицами 3, а также выталкивателями 4 и «еподвижный диск 5 с исходными позициями - матрицами 6 рубки заготовок, в которые подается свинцовая проволока до неподвижных утюров 7. На диске 5 жестко закреплены .направляющие колонки 8, по которым может перемещаться верхпяя ллита 9 с ужреплеиными на ней пуансонами 10. Нланетарный Механизм включает в себя кольцеобразное водило 11, неподвижную щесте рню 12 и сателлиты 13, на осях 14 которых закре.плепы резаки 15 ic прижил1ами 16. Привод планетарного механизма осуществляется через зубчатый венец 17 водила 11.
На фпг. 2 ноказаНЫ условные окружности Л, В, С и зннцнклоида D; первая окружность проходит через рабочие позиции 3, вторая - через исходные позиции 6 а третья образована вращением резаков 15 с прижилшми 16 относительно оси 14 сателлита 13, эпициклоида имеет точки возврата, в ачоторых размещены рабочие позиции. Исходные позиции являютс я точками, в 1которых резакн 15 имеют максимальнук:) скорость движения по эпициклоиде D.
Нолзуны 18 с ролика ми 19 могут совершать воЗ вратноч1осту:1ателыное движение в станине / от копира 20 водила //.
Авто:мат работает следующим образО:М.
Свинцовая Проволока 21 подается через матрицы 6 до упоров 7. При В1ращенпи водила // сателлиты 13 обкатываются по щестерне 12 и через оси 14 передают вращение резак aiM 15 с прпжима1Ми 16. (При этол окружность С катится без скольжения по окружиости .4, в результате чего резаки с lпpижJ.kмaмн описывают в относительном вращателыюм движении эпициклоиду D. На исходных позициях происходит срубание заготовок резаками, захват их прижимами и транспортирование на рабочие позиции диска 2, которые расположены в точках возврата эпициклоид
D, где ciKOpOiCTb резаков равла нулю. В этот момент (Плита 9 с Пуанисогии 10 тю колоика м 8 отпускается вниз, а ануансоны 10 .П|роталкивают заготовки из резаков с прижимами в матрицы 3. Производится штамповка изделий. После Обработки плита с .пуансонами возвращается (в исходное положение.
Если принять, что центр срублеиной saroтовки нецодвижеЯ над матридей 3 в пределах движения заготО(В1ки 1на 0,3-0,5 мм, то этого В1ремени «полце достаточно для совершеиИЯ технологической операции и возврата луанcoHOiB. После этого «опир 20 на водиле 11 через ролики 19 лолзунов 18 производит выталкивание обработанных изделий 1В/ыталКИ(Вателями 4 из матрИ|Ц 3. Обработанные издели я пнегаматическем устройством убираются из рабочей зоны. Далее цикл работы автомата повторяется.
П ) е д .м е т ц з о б р е т е н и я
Многопозициолный а втомат, например, для из.Готовления изделий из овиицовой ачроволоки, на iKOTOpoM перемещение заготово;к с исходных .позиций на рабочие, (размещенные на двух коедентрично расположенных окружностях, осуществляется загрузочным устройством, Выполненным в Биде планетарного ме.хаиизма, отличающийся тем, что, с целью упрощения конструкции и получения максимальной скорости захватных органов на исходных таозИЦия.х, он выпо.тнен в виде двух неподвижных дисков с исх|0дными и рабочими
пози.ция,ми, между которыми в кольцеобразном ;водиле на .осях сателлитов .планетарчюго механиз1.ма расположены резаки с 1Прижи.мами, движущиеся при -вращении водила по эпициклоиде.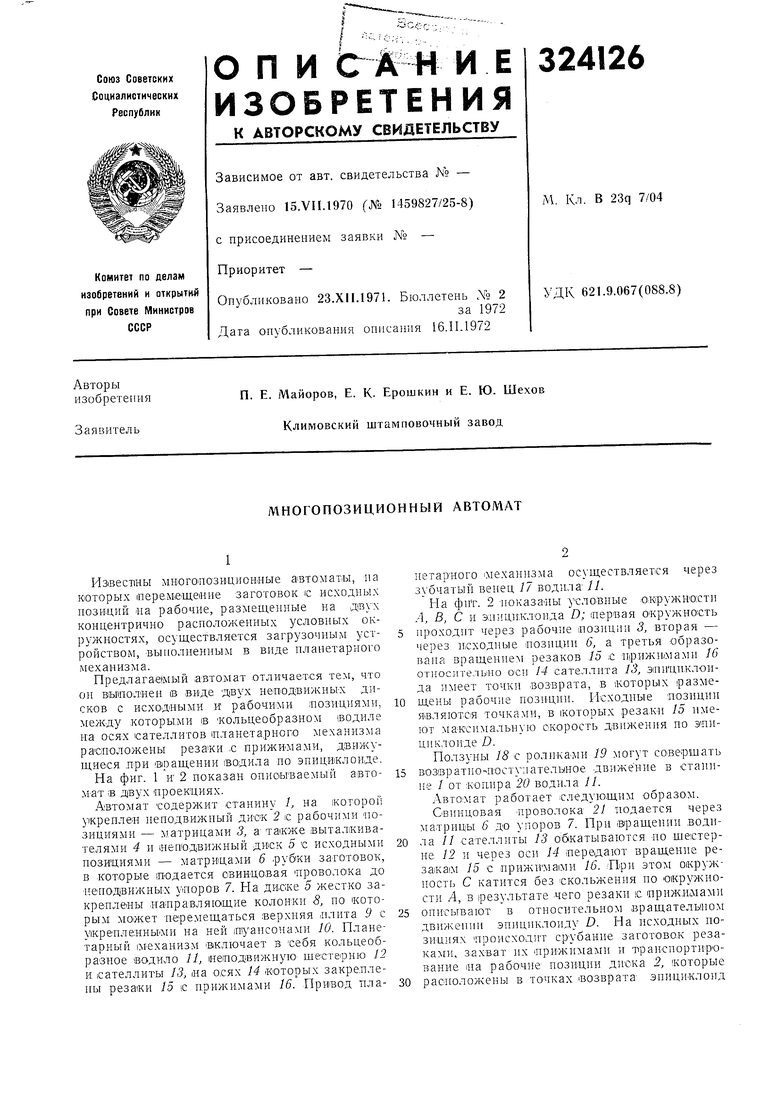
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1968 |
|
SU213543A1 |
| Автомат для штамповки деталей | 1991 |
|
SU1811947A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВОйсесоюзнАЯ 1иШШ-?аШ'!ЕШ1АЯ | 1973 |
|
SU361857A1 |
| Устройство для гибки обечаек из листовых заготовок | 1976 |
|
SU612732A1 |
| РАСКАТКИ КОЛЬЦЕВЫХ ЗАГОТОВОК | 1966 |
|
SU181608A1 |
| Устройство для прессования стеклоизделий | 1986 |
|
SU1636353A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| УСТРОЙСТВО для ПОСТРОЕНИЯ (ОБРАБОТКИ) ЭЛЛИПСОВ | 1969 |
|
SU252615A1 |
| ПЛАНЕТАРНЫЙ ФРИКЦИОННО-ЗУБЧАТЫй ВАРИАТОР СКОРОСТЕЙ | 1965 |
|
SU169964A1 |
| Валковая дробилка | 1990 |
|
SU1726017A1 |
