Изобретение относится к машиностроению, преимущественно к автоматизации холодной штамповки деталей из штучных заготовок.
Цель изобретения - повышение производительности и расширение технологиче- . ских возможностей автомата.
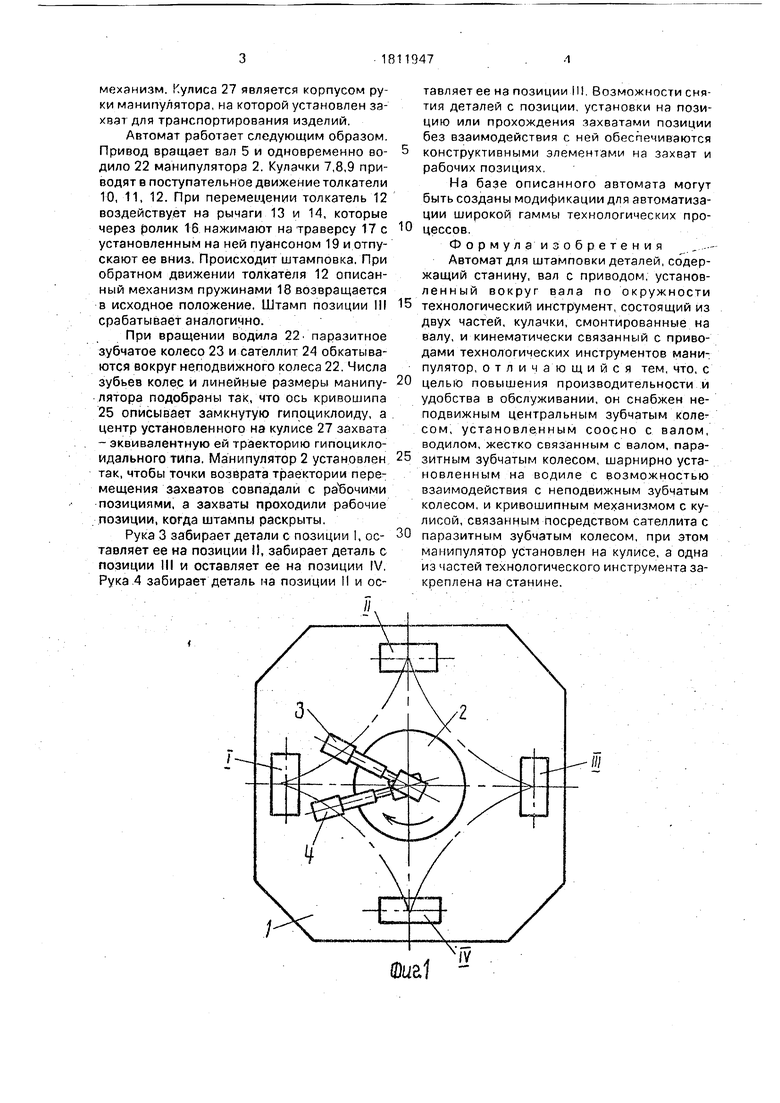
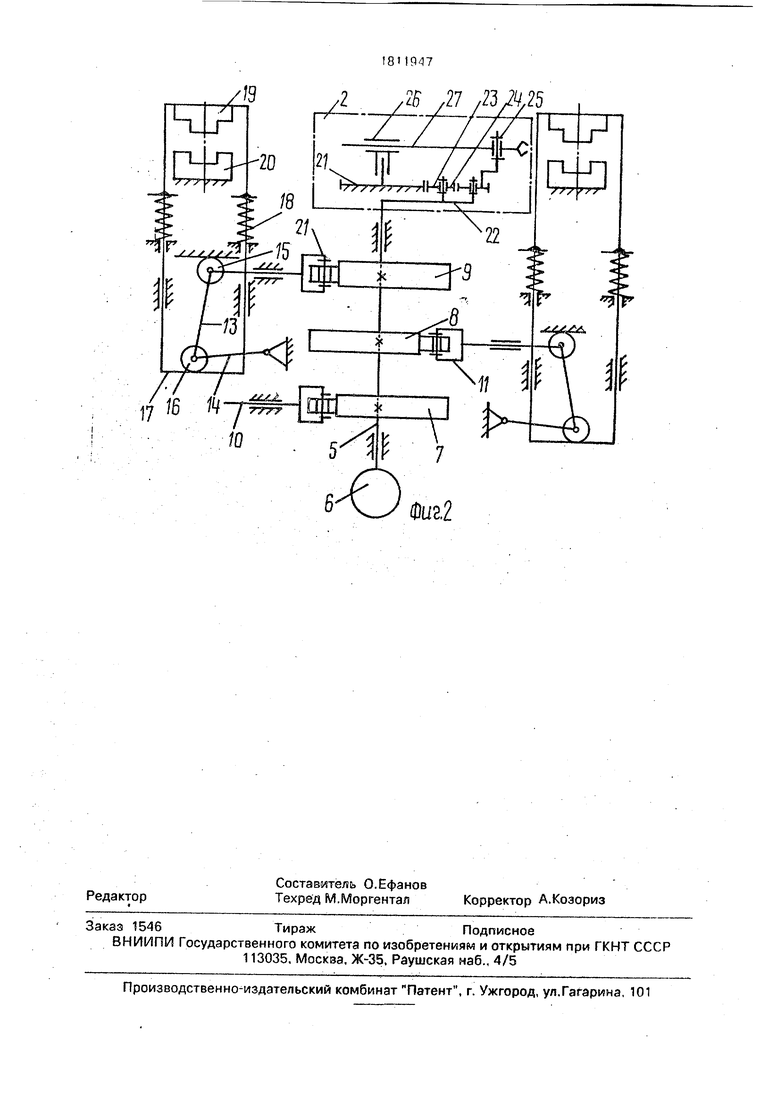
На фиг.1 показан автомат штамповки, план; на фиг.2.- кинематическая схема автомата штамповки.
Автомат штамповки представляет собой станину 1, на которой установлен манипулятор 2, имеющий по меньшей мере две руки 3,4 с захватами и четыре рабочие позиции: I - позиция выдачи заготовок, обычно совмещенная с первой технологической позицией; II - перекладочная позиция; III - вторая технологическая позиция; IV - позиция сбора готовых изделий.
На станине установлен вал 5, связанный с непрерывно вращающимся приводом, например, электродвигателем 6. На валу 5 закреплены кулачки 7,8,9, связанные с толкателями 10, 11, 12. Толкатели 11, 12 приводят в действие однотипные механизмы позиций штамповки I и И. Толкатель 12
шарнирно связан с парой рычагов 13, 14. В шарнирных соединениях рычажного механизма установлены опорные ролики 15, 16, причем ролик 15 опирается на неподвижную плоскость, а ролик 16 - на траверсу 17. Пружины 18 обеспечивают силовое замыкание описанного рычажно-кулачкового механизма. На траверсе 17 установлен пуансон 19. образующий вместе с неподвижной матрицей 21 штамп.
Толкатель 10 может быть связан с механизмом подачи заготовок или ленты, а также другого вспомогательного механизма, конструкция которого определяется потребно- стями конкретного технологического процесса и не изменяет принципа действия автомата.
Манипулятор 2 представляет собой планетарный механизм с неподвижным центральным зубчатым колесом 21, водйлом 22, жестко связанным с валом 5. На водиле 22 шарнирно установлено паразитное зубчатое колесо 23, входящее в зацепление с неподвижным колесом 21 и сателлитом 24. На сателлите закреплен кривошип 25. образующий вместе со звеньями 26, 27 кулисный
ел
с
ю
Јь vj
механизм. Кулиса 27 является корпусом руки манипулятора, на которой установлен захват для транспортирования изделий.
Автомат работает следующим образом. Привод вращает вал 5 и одновременно во- дило 22 манипулятора 2. Кулачки 7,8,9 приводят в поступательное движение толкатели ТО, 11, 12. При перемещении толкатель 12 воздействует на рычаги 13 и 14, которые через ролик 16 нажимают на траверсу 17 с установленным на ней пуансоном 19 и отпускают ее вниз. Происходит штамповка. При обратном движении толкателя 12 описанный механизм пружинами 18 возвращается в исходное положение. Штамп позиции 111 срабатывает аналогично.
При вращении водила 22. паразитное зубчатое колесо 23 и сателлит 24 обкатываются вокруг неподвижного колеса 22. Числа зубьев колес и линейные размеры манипу- лятора подобраны так, что ось кривошипа 25 описывает замкнутую гипоциклоиду, а центр установленного на кулисе 27 захвата - эквивалентную ей траекторию гипоцикло- идального типа. Манипулятор 2 установлен так, чтобы точки возврата траектории перемещения захватов совпадали с рабочими позициями, а захваты проходили рабочие позиции, когда штампы раскрыты.
Рука 3 забирает детали с позиции I, ос- тавляет ее на позиции И, забирает деталь с позиции 111 и оставляет ее на позиции IV. Рука .4 забирает деталь на позиции II и оставляет ее на позиции III. Возможности снятия деталей с позиции, установки на позицию или прохождения захватами позиции без взаимодействия с ней обеспечиваются конструктивными элементами на захват и рабочих позициях.
На базе описанного автомата могут быть созданы модификации для автоматизации широкой гаммы технологических процессов.
Формул аи зоб ретения ,..- Автомат для штамповки деталей, содержащий станину, вал с приводом, установленный вокруг вала по окружности технологический инструмент, состоящий из двух частей, кулачки, смонтированные на валу, и кинематически связанный с приводами технологических инструментов манипулятор, отличающийся тем, что, с целью повышения производительности и удобства в обслуживании, он снабжен неподвижным центральным зубчатым колесом, установленным соосно с валом, водилом, жестко связанным с валом, паразитным зубчатым колесом, шарнирно установленным на водиле с возможностью взаимодействия с неподвижным зубчатым колесом, и кривошипным механизмом с кулисой, связанным посредством сателлита с паразитным зубчатым колесом, при этом манипулятор установлен на кулисе, а одна из частей технологического инструмента закреплена на станине.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для изготовления двухветвевых пружин с отогнутыми концами | 1982 |
|
SU1052304A1 |
| Грейферное устройство для подачи заготовок в рабочую зону пресса | 1971 |
|
SU401092A1 |
| Транспортирующее устройство | 1985 |
|
SU1326375A1 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| Манипулятор | 1989 |
|
SU1743850A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Грейферное подающее устройство | 1984 |
|
SU1189553A1 |
| Лесопильная рама | 1991 |
|
SU1831418A3 |
Изобретение относится к машиностроению и может быть использовано для автоматизации штамповки деталей из штучных заготовок. Автомат имеет непрерывно вращающееся транспортное устройство, перемещающее детали по траекториям циклоидального типа с точками возврата в; рабочие позиции. 2 ил.
(Dual
| Лисицин В.Д., Будзиловский А.Е | |||
| Специальные штамповочные автоматы | |||
| М.: Машгиз, 1962, с,43. |
