Изобретение ОБНОСИТСЯ к области измерительной техии1ки.
Известны автоматические кампенсаторы для из-мерения перемещений, содержащие мапнитный модулятор, по стоянный мапяит, соединяемый с объектом регулирования, и следящую систему с исполнительным приводом.
Предложенный компенсатор отличается от известных тем, что он снабжен дополнительным постоянным магнитом, соеди-ненным -с исполнительным приводом следящей системы, а магнитный модулятор вьшолщен в виде рамки, В окне которой установлены ic зазором основной и дополиительный мапниты, маправлевные матНИТ1НЫМИ -полюсами нащстречу один к другому.
Такое выполнение а1вто..матичвского «омпенсатора позволяет 1павысить точность измерения.
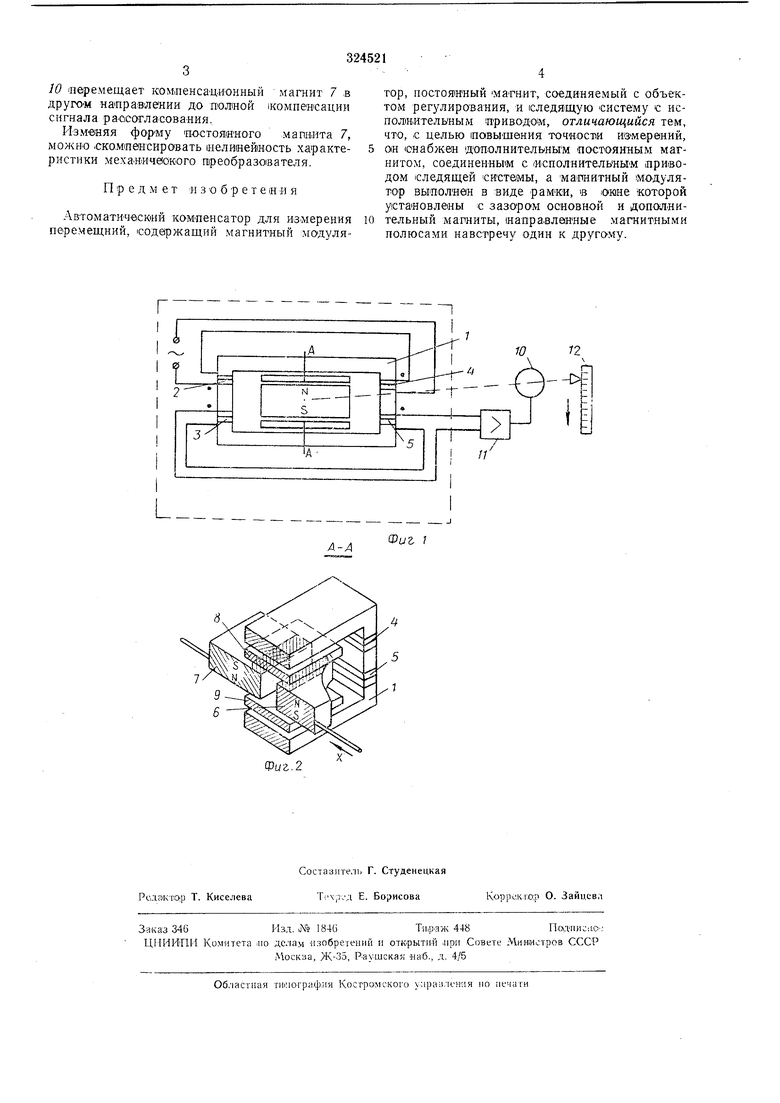
На фиг. 1 изображена схе.ма лредложенного .компенсатора; ;на фиг. 2 - канструкция магнитного модулятора.
у втоматический компвнсатор содержит магнитный модулятор, вьшолнениый в виде ра-мки / 1C обмотками 2-5, в окне .которой установлены два постоянных магнита 5 и 7, иатравленные магнитными лолюсами навстречу один к другому. Неподвижные ферромагнитные пластины 8 и 9 размещены между магнитами « рамкой. Следящая система состоит из реверсивного электродвигателя 10, -силителя // л отсчерного устройства J2.
Обмотки 2 и 4 соединены согласно и пОследавательно и подключены к источнику перемениого тока. Обмотки 5 и 5 включены встречно и подключены к усилителю /У. Магнит 6 соединен с объектом измерения, а магнит 7 .- с исполнительным электродвигателем JO. Описываемый компенсатор работает следующим образом.
При положении постоянных магнитов, когда площади Частей их полюсов, введенные в рамку /, равны, магнитные потоки, проходящие через пластины 8 и 9, также равны и не подмагничивают магнитопровод рамки. Э.д.с. на выходе модулятора отсутствует, и электродвигатель 10 следящей системы неподвижен.
Изменение положения магнита 6, связанного с объектом измерения, вызывает появление
разностного магнитного потока, подмалничивающего ра.мку И соответственно вызывающего появление на входных обмотках 3 5 сигнала, состоящего из четких гарманик. Этот сигнал усиливается усилителем // и отрабатывается электродвигателем 10 до тех пор, лтока разностный магнитный поток, вызванный смещением магнита 5, не будет равен нулю.
Перемещение магнита 6 ъ противоположную сторону вызывает появление сигнала, фаза ко10 перемещает коМ|Г1енсац.ИОнный магнит 7 в другом на1пра:вяении до полиой 1компеисации сигнала раОСОТлаСования, Изменяя форму постояиного мапвита 7, можно .ско.М1пе Нсировать мелииейиость характеристики механического гареобразощателя. Предмет изобретения Автоматичесюий компенсатор для измерения перемещний, содержащий магнитный модулятор, постояиный маГнит, соединяемый с объектом регулирования, и следящую систему с исполиительным ириводю1м, отличающийся тем, что, с целью иовышвния точиост1и измерений, он снабжен дололнительньгм постоянным магнитом, соединенным с (ИСполнительным лриводом Следящей систвмы, а машитный модулятор выполнен в виде рамки, в омне которой установлены с зазорам основной и дополнительный магниты, напра.вленные магнитными полюсами навстречу один к другому.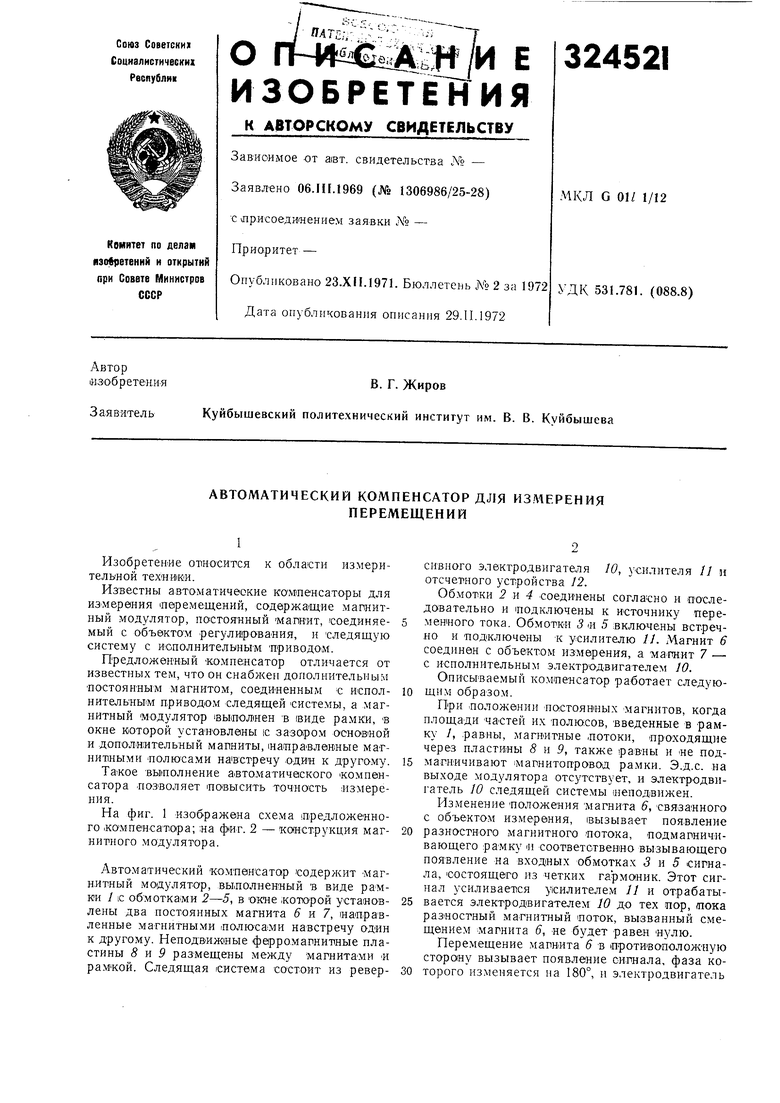
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический компенсатор | 1960 |
|
SU135963A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МГНОВЕННОЙ СКОРОСТИ ВРАЩЕНИЯ | 2002 |
|
RU2227304C2 |
| Фотоэлектрический угломерных следящий прибор | 1972 |
|
SU455240A1 |
| УСТРОЙСТВО для УРАВНОВЕШИВАНИЯ МНОГОКОМПОНЕНТНЫХ АЭРОДИНАМИЧЕСКИХ ВЕСОВ | 1969 |
|
SU237412A1 |
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| АВТОМАТИЧЕСКИЙ ПОЛЯРНО-КООРДИНАТНЫЙ КОМПЕНСАТОР ПЕРЕМЕННОГО ТОКА | 1968 |
|
SU219008A1 |
| Устройство для измерения магнитной восприимчивости слабомагнитных материалов | 1985 |
|
SU1285418A1 |
| ТАХОМЕТР ЧАСТОТНЫЙ ЯЛОВЕГИ | 2004 |
|
RU2258228C1 |
| УСТРОЙСТВО ДЛЯ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1978 |
|
SU1839912A1 |
| Электромеханический исполнительный орган системы ориентации искусственного спутника Земли | 2016 |
|
RU2649560C2 |
А-А
Фиг. 2
.-г
12
. 1
Фиг 1
