Предлагаемое устройство относится к области электротехники и представляет собой совокупность электродвигателя-маховика (ЭДМ) и системы магнитной стабилизации положения маховика. Устройство может быть использовано в качестве исполнительного механизма системы ориентации и стабилизации (СОС) космического аппарата (КА) в орбитальной системе координат.
Известны электродвигатели-маховики с магнитной подвеской [1, 2]. Конструкцию таких ЭДМ можно разделить на две группы. К первой относятся такие конструкции, в которых шариковые подшипники заменены магнитными. Маховик опирается на вал, который вращается в магнитных подшипниках. Примером такого устройства является ЭДМ, описанный в [2]. Подвеска маховика этого ЭДМ выполнена на магнитных подшипниках с комбинацией постоянных магнитов и электромагнитов постоянного тока с управлением аксиальным смещением при демпфировании смещений в радиальном направлении. В осевую часть маховика вставлен кольцевой постоянный магнит, который обеспечивает опорное поле в 4-х зазорах подшипника, образованных 2-мя кольцевыми выточками статора и 2-мя фланцами ротора. На фланцах ротора размещена обмотка электромагнита, обеспечивающая осевое перемещение маховика.
Однако наиболее передовыми по техническим характеристикам в настоящее время являются кольцевые маховики [1], которые за счет периферийного расположения массы маховика обеспечивают более высокое отношение кинетического момента к массе, чем обычные. Ротор кольцевого маховика [1] представляет собой пакет кольцевых пластин, из которых по крайней мере одна изготавливается из проводящего материала и подвешивается в магнитных подшипниках. Ротор вращается с помощью дуговых статоров, расположенных с внешней стороны маховика. Положение ротора относительно статора стабилизируется с помощью системы магнитной стабилизации.
Предлагаемое устройство также содержит кольцевой ЭДМ и систему магнитной стабилизации. Поэтому устройство [1], является ближайшим аналогом и выбрано в качестве прототипа. Основные недостатки прототипа - это низкая экономичность, сложность конструкции ЭДМ и системы магнитной стабилизации.
Первый недостаток связан с наличием дуговых статоров и конструкцией ротора. Как указано в [1] двигательный момент возникает за счет электропроводящей пластины в роторе, т.е. по существу - это асинхронный двигатель с ферромагнитным ротором. Хорошо известно, что двигатели такого типа имеют крайне низкий кпд. Кроме того их механические характеристики существенно нелинейны, что в ряде случаев (например, в высокоточных СОС) выступает как недостаток. Наличие дуговых статоров дополнительно увеличивает энергопотребление из-за наличия так называемых краевых эффектов [4, с.15 и 22]. Краевые эффекты сами по себе вызывают расход мощности, а кроме того всякое смещение ротора от идеально симметричного положения, неизбежное в реальных конструкциях, вызывает дополнительные усилия, приложенные к ротору в аксиальном направлении. Их компенсация приводит к дополнительному расходу мощности. На чертеже, приведенном в [1], имеется один дуговой статор. Значит, имеется радиально направленное усилие, приложенное к ротору. Его компенсация опять-таки требует расхода мощности. Дуговые статоры неизбежны в прототипе, так как магнитные подшипники охватывают маховик, вследствие чего для размещения статора остаются свободными только дуговые участки.
Рассмотрим второй недостаток - сложность конструкции. Он обусловлен тем, что имеется три магнитных подлинника и три дуговых статора (для взаимной компенсации радиальных усилий), т.е. шесть электромеханических узлов. Причем необходимо у всех этих узлов обеспечить с большой точностью рабочие зазоры с маховиком. Кроме того, как видно из чертежа [1], каждый подшипник содержит два электромагнита для аксиальной и два - для радиальной стабилизации. Значит всего имеется двенадцать электромагнитов. С учетом дуговых статоров ЭДМ содержит пятнадцать силовых электромагнитных узлов. Каждый электромагнит обслуживается своим усилителем-преобразователем и датчиком контроля перемещений. Следовательно, прототип содержит двенадцать каналов стабилизации положения маховика. Из сказанного ясно, что прототип имеет сложную конструкцию и не менее сложную систему магнитной стабилизации положения маховика.
Целью предлагаемого изобретения является упрощение конструкции и системы магнитной стабилизации положения маховика, а также повышение экономичности.
Поставленная цель достигнута за счет применения: 1) трех электромагнитов в сочетании с предложенной конструкцией маховика; 2) четырех канальной системы стабилизации; 3) высокоэкономичного двигателя нормального исполнения (без дуговых статоров). Маховик ЭДМ выполнен в виде цилиндра из магнитопроводящего материала, на внутренней стороне которого закреплен ротор двигателя, а на внешней стороне имеется набор кольцевых полюсов, которые расположены с рабочими зазорами коаксиально с сегментными полюсами электромагнитов, имеющими броневую конструкцию. Система магнитной стабилизации содержит три канала радиальной стабилизации и один канал аксиальной стабилизации, в котором выходы нереверсивных датчиков контроля перемещений, а также обмотки электромагнитов включены между собой последовательно.
Сущность изобретения поясняется чертежами, где:
на фиг.1 изображен электродвигатель-маховик;
на фиг.2 приведена схема магнитной стабилизации положения ротора;
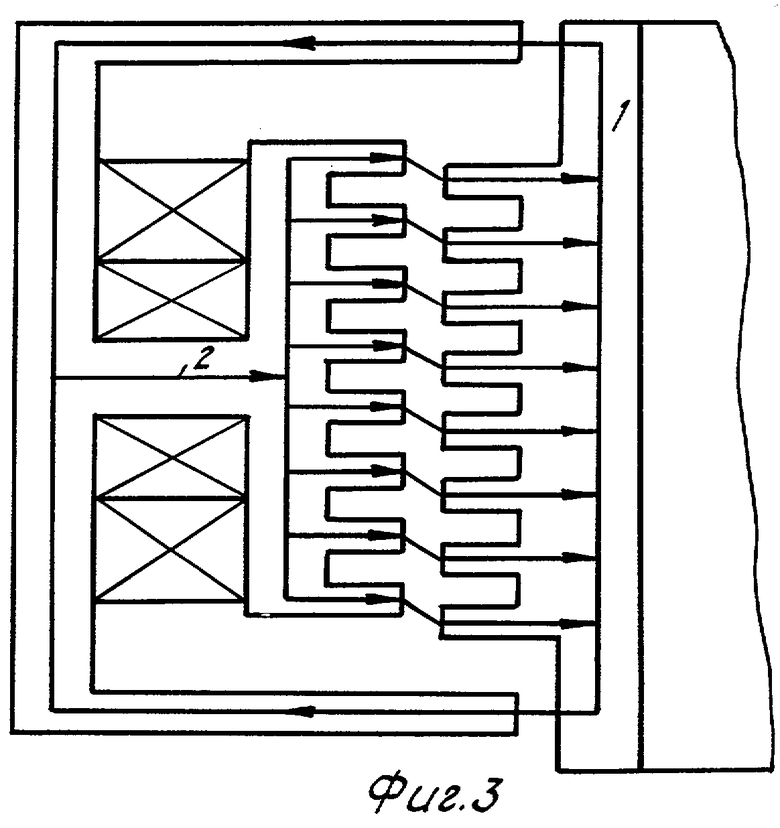
на фиг.3 показан путь магнитного потока электромагнита;
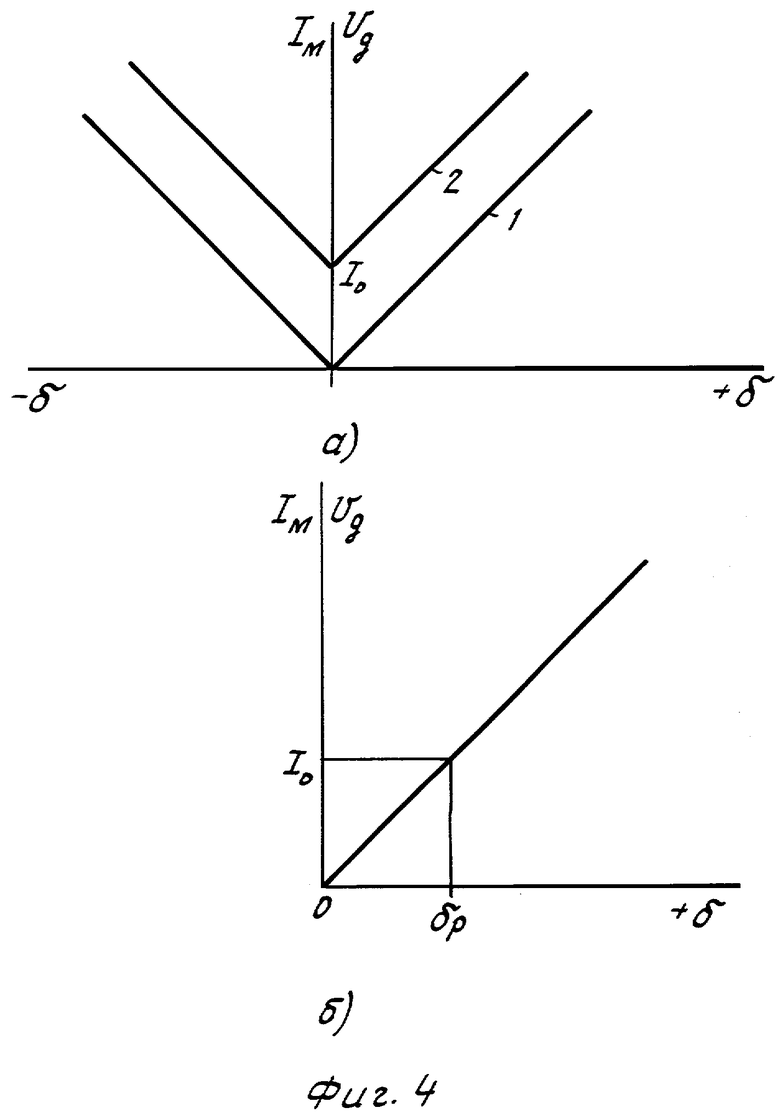
на фиг.4 приведены зависимости напряжения Uд на выходе датчиков контроля положения маховика и тока электромагнитов Iм от величины рабочего зазора δ.
Электродвигатель-маховик (фиг.1) содержит в своем составе маховик 1, имеющий цилиндрическую форму и изготовленный из ферромагнитного материала, например из стали CT-10. На внутренней цилиндрической поверхности маховика установлен ротор двигателя обращенной конструкции. В общем случае тип двигателя произволен; на Фиг.1 показан наиболее простой и надежный асинхронный двигатель с короткозамкнутым ротором 2, в котором запрессованы стержни 3. Статор двигателя 4 установлен на стакане 5, на котором располагаются установочные места и герметизирующая крышка 14.
Маховик удерживается в рабочем положении магнитным полем, создаваемым броневыми электромагнитами 6. Число их должно быть не менее 3-х. Каждый электромагнит имеет три стержня. На среднем стержне расположены полюса 7 в виде набора относительно тонких пластин сегментной формы. Число таких полюсов и их толщина определяются величиной усилия, требуемого для аксиальной стабилизации маховика. Чем меньше допустимые перемещения маховика в аксиальном направлении (чем больше жесткость стабилизации), тем больше требуется полюсов и тем меньше их толщина. На внешней цилиндрической поверхности маховика, в ее средней (по высоте цилиндра) части размещены кольцевые полюса 8, опоясывающие маховик. Эти полюса расположены коаксиально по отношению к сегментным полюсам 7 так, что каждый кольцевой полюс находится напротив соответствующего ему сегментного полюса. Цилиндрические поверхности полюсов образуют рабочий зазор, в котором формируются электромагнитные силы. Крайние же стержни броневых электромагнитов 6 образуют рабочие зазоры с гладкой цилиндрической поверхностью маховика и служат для замыкания рабочего потока. Каждый из электромагнитов 6 имеет две катушки 12 и 13, расположенные на среднем стержне. Одна из них, например 12, служит для радиальной, а другая (13) - для аксиальной стабилизации.
Радиальные смещения маховика контролируются с помощью датчиков 9, установленных в местах размещения электромагнитов. Аксиальные смещения маховика контролируются датчиками 10, размещение которых ориентировано относительно торцевых поверхностей маховиков. Датчики 10 также располагаются в зонах размещения электромагнитов. Таким образом в состав ЭДМ входит три электромагнита, три датчика контроля радиальных и три датчика контроля аксиальных смещений маховика.
Для фиксации маховика при выключенной системе электромагнитной подвески предусмотрены упоры 11, снабженные подушками, например, из пластмассы ГЭН-150, для предотвращения повреждения маховика. Стакан 5 и крышка 14 образуют вакуумную камеру, внутри которой давление составляет, например, 0,001-1 мм рт.ст. Благодаря этому практически исключается трение маховика о воздух, что необходимо для уменьшения момента выбега маховика. Элементы герметизации вакуумной камеры новизны не содержат и поэтому на фиг.1 не показаны.
Система магнитной стабилизации положения маховика состоит (фиг.2) из трех систем (по числу электромагнитов) радиальной и одной системы аксиальной стабилизации. Последняя состоит из последовательно соединенных катушек электромагнитов 13, усилителя-преобразователя 15, датчиков 10 контроля аксиальных перемещений маховика 1. Каждая из систем радиальной стабилизации состоит из катушки электромагнита 12, усилителя-преобразователя 15 и датчика радиального смещения 9. Видно, что выходы датчиков 10 включены последовательно, а выходные зажимы присоединены к входу усилителя-преобразователя 15. Датчики 9, 10 могут быть любого типа: оптическими, индуктивными, трансформаторными, магнитомодуляционными и т.д. Для конкретности на фиг.2 изображены индуктивные датчики, у которых индуктивность обмотки зависит от величины рабочего зазора.
Из приведенного описания конструкции и схемы видно, что ЭДМ имеет всего три электромагнита, в то время как в прототипе их двенадцать. Для размещения ротора двигателя свободна вся внутренняя поверхность маховика. Следовательно, возможно применение двигателя нормального исполнения, причем любого типа: асинхронного, вентильного и т.д. Выбор типа двигателя в данной конструкции можно производить исходя из условий удовлетворения различных технических требований, предъявляемых к устройствам такого рода: обеспечение высокого кпд линейности регулировочных характеристик и т.д., чего не имеется в прототипе. Как указывалось, в прототипе можно использовать лишь асинхронный двигатель с ферромагнитным ротором, имеющий низкий кпд и нелинейные механические характеристики. Нормальное исполнение двигателя исключает краевые эффекты, свойственные для прототипа. Из сказанного видно, что предлагаемый ЭДМ более экономичен, чем прототип, и имеет более простую конструкцию.
Так как в прототипе двенадцать тяговых электромагнитов, то и система магнитной стабилизации 12-канальная. В предлагаемом устройстве аналогичная система более проста, так как имеет четыре канала, причем новизна заключается в том, что аксиальная стабилизация осуществляется одноканальной системой с последовательно включенными выходами датчиков и аналогично включенными обмотками электромагнитов.
Предлагаемое устройство работает следующим образом. При смещении маховика 1 в аксиальном направлении (фиг.3) силовые линии 2 магнитного потока, создаваемого электромагнитом, искривляются в рабочем зазоре, за счет чего появляется тангенциальная составляющая сила магнитного тяжения, приложенная к маховику в аксиальном направлении навстречу его смещению и, следовательно, препятствующая этому смещению. Так как полюса, опоясывающие маховик, выполняются в виде набора тонких колец, а полюса электромагнитов - в виде набора тонких сегментов, то даже незначительное аксиальное смещение маховика вызывает существенное изменение площади взаимного перекрытия полюсов, а следовательно, и появление тангенциальной составляющей силы тяжения. Так как силовые линии магнитного поля замыкаются по маховику, то он выполняется из магнитопроводящего материала. Само по себе использование тангенциальной составляющей силы, возникающей при искривлении линий магнитного потока, для подвески ферромагнитных тел известно.
Подвеска с помощью этого явления применена в ЭДМ, описанном в [2]. Предмет предлагаемого изобретения состоит в особенности конструкции ЭДМ, заключающейся в цилиндрической форме маховика, опоясанной набором полюсов, расположенных коаксиально с сегментными полюсами электромагнитов.
Смещение маховика в аксиальном направлении преобразуется в электрический сигнал датчиками 10. Для исключения перекоса маховика число датчиков должно быть не менее 3-х. Датчики 10 имеют нереверсивный выход. Это значит, что при смещении маховика в обоих направлениях (вверх или вниз) от нулевого положения датчики выдают сигнал одной и той же полярности. Поэтому зависимость выходного напряжения Uд датчика от величины смещения δ имеет вид линии 1 на Фиг.4а. Сигналы датчиков суммируются вследствие того, что их выходы включены по схеме суммирования (например, последовательно, как показано на фиг.2), а суммарный сигнал подается на вход усилителя-преобразователя 15, который усиливает его, преобразует в величину тока электромагнитов, вырабатывает и вводит в систему регулирования сигналы первой, а при необходимости и второй производной входного сигнала, необходимые для обеспечения устойчивости [2, 3].
Зависимость тока Iм, протекающего через электромагнит, от смещения δ показана на фиг.4 (линия 2). Начальное смещение необходимо для повышения жесткости стабилизации. Таким образом при увеличении смещения маховика в аксиальном направлении восстанавливающее усилие возрастает, во-первых, за счет искривления магнитного потока, во-вторых, за счет возрастания его величины. Для работы устройства существенным является то, что датчики имеют нереверсивные выходы. Если бы выходы были реверсивными, то при перекосе маховика сигнал одного датчика, например, положительной полярности компенсировал бы сигнал другого датчика отрицательной полярности, т.е. система была бы нечувствительна к перекосам. Очевидно, что нереверсивный выход организовать проще, чем реверсивный. В рассматриваемом случае для этого нужен простейший выпрямитель. Следовательно, необходимость нереверсивного выхода можно рассматривать как дополнительное преимущество предлагаемого устройства.
Система радиальной стабилизации, несмотря на отмеченные конструктивные отличия, работает в сущности так же, как прототип. Напряжение Uд датчика 9 и ток Iм электромагнита 12 возрастают при увеличении зазора δ, как показано на Фиг.4б. Под воздействием 3-х электромагнитов маховик стабилизируется с рабочим зазором δр, которому соответствует ток I0. При возмущениях ток электромагнита изменяется относительно I0, парируя эти возмущения. Все составные элементы систем аксиальной и радиальной стабилизации (датчики, усилители-преобразователи), а также динамика работы этих систем описаны в литературе [2, 3].
Литература
1. Anderson Willard W., Groom Nelson J. Annular momentum control device, used for stabilization of space vechicles and like. Патент США, кл. 244-165 (В 64 G 1/00), №3.915.416.
2. Sabnis Ajit V., Dendy Joe B., Schmitt Frank M. A magnetically suspended large momentum wheel. "Journal of Spacecraft and Rockets", 1975, V.12, №17, с.420-427.
3. В.И.Иванов, С.Н.Иконников, М.И.Красильникова. Магнитный подвес на постоянном токе. Автоматика и телемеханика. 1968, №11, с.189.
4. Г.И.Ихеля, С.А.Ребров, А.Т.Шаповаленко. Линейные асинхронные двигатели. Техника", Киев - 1975 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электромеханический исполнительный орган системы ориентации искусственного спутника Земли | 2016 |
|
RU2649560C2 |
| Электродвигатель | 1988 |
|
SU1658284A1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| Универсальный каскадный многофазный аксиальный магнитоэлектрический генератор | 2017 |
|
RU2704805C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2003 |
|
RU2241298C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2004 |
|
RU2279174C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОДВЕС ВЕРТИКАЛЬНОГО ВАЛА РОТОРА | 2016 |
|
RU2626794C1 |
| МАГНИТОЭЛЕКТРИЧЕСКАЯ ОПОРА | 2005 |
|
RU2287726C1 |

Изобретение относится к области оборудования космической станции. Устройство содержит маховик, обращенный электродвигатель, электромагниты и магнитный стабилизатор аксиального и радиального положения маховика с датчиками перемещений, а также усилители-преобразователи. Маховик выполнен в виде цилиндра из магнитопроводящего материала, на внутренней стороне которого закреплен ротор двигателя, а на внешней выполнены кольцевые полюса. Магниты выполнены с тремя стержнями, на среднем из которых закреплены сегментные полюса. Технический результат - упрощение конструкции и снижение затрат энергии. 1 з.п. ф-лы, 4 ил.
| Патент США №3918416, кл | |||
| Нагревательный прибор для центрального отопления | 1920 |
|
SU244A1 |

