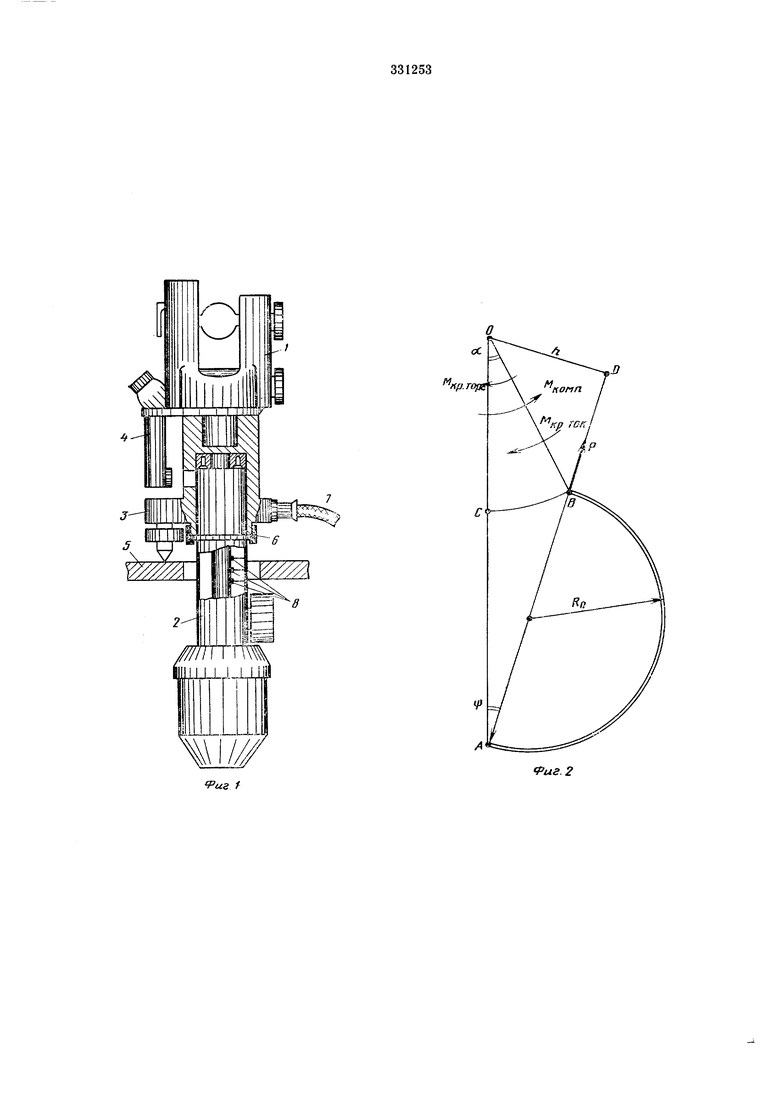
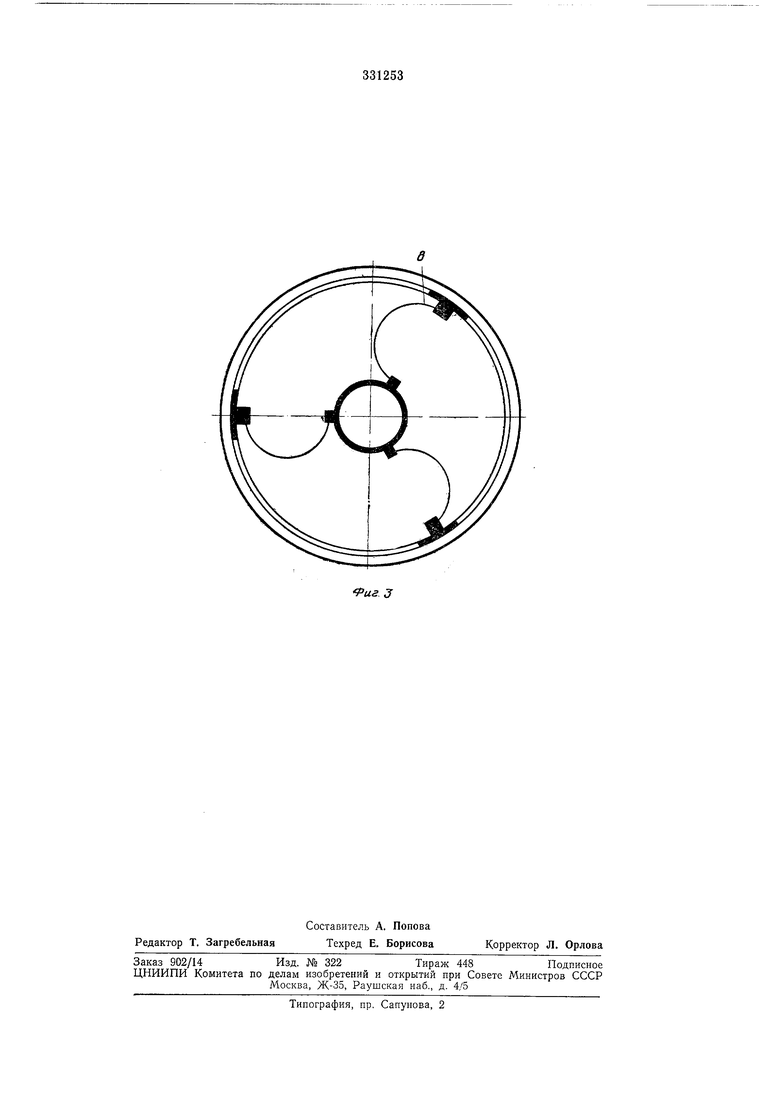
Изобретение относится к области приборостроения, в частности к приборам геодезии и маркшейдерского дела. Известные маркшейдерские гирокомпасы, содержащие теодолит с автоколлимационной системой, триггер, соединительное устройство и гидроприставку с маятниковым чувствительным элементом во взрывобезопасном корпусе, не позволяют комленсировать крутящий момент торсиона и токоподвода. Описываемый гирокомпас отличается от известных тем, что в нем токоподвод выполнен в виде изогнутых в вертикальной или горизонтальной плоскости лент, концы которых закреплены на чувствительном элементе на расстоянии г от его оси вращения, определяемом формулой -( где D - расстояние между закрепленными концами лент токоподвода, К-жесткость торсиона, а, Ь, с -числовые коэффициенты, зависящие от формы изгиба лент, IE - жесткость лент токоподвода. Гирокомпас состоит из теодолита /, гпроприставки 2, триггера 3 и автоколлимационной системы 4. Гирокомпас устанавливается на штативе 5. Гироприставка выполнена в виде съемного узла, крепящегося к триггеру с помощью соединительного устройства 6. Автоколлимационная система жестко крепится к алидаде теодолита. Питание (36 и 400 г/{ переменного тока) .подается к гиродвигателю через кабель 7, жестко связанный с триггером, и токоподвод 8 внутри корпуса гироприставки. Крепление гироприставки к ппжпси части триггера теодолита с помощью соединитель.ного устройства обеспечивает устойчивое положение прибора на штативе. В качестве теодолита быть применен любой серийный теодолит без специальных требований к нему. Автоколлимационная система, жестко соединяемая с алидадой теодолита, имеет небольшой вес. Ленты токоподвода установлены так, что создаваемый HMII крутящий момеит комиенсирует крутящий момент торсиона. В качестве примера рассмотрим компенсацию крутящего момента торсиона лентами токоподвода, расположение которых показано на фиг. 2. (Один из вариантов конструкции токоподвода показан на фиг. 3). При повороте чувствительного элемента на угол а условие компенсации следующее: ЛГкомп кр. торс + . (1) где - компенсирующий момент, обусловленный наличиел силы распора Р, необходимой для изгиба ленты токоподвода в форме дуги; Л1кр. торс - момент, возникающий в результате закручивания торсиона на угол а; Мкр. ток - момент закручивания токоподвода на угол а. Величина компенсирующего момента из рассматривания треугольников AOD и АОВ. По теореме синусов: (2) smr stn i где/) - расстояние между концами ленты; г-радиус чувствительного элемента, расстояние от центра чувствительного элемента до точки закрепления токоподвода. Р1з треугольника AOD h (r + D)swO -L± sin-j.(3) Чувсгвнтельпый элемент гироприставки совершает колебания в пределах малых углов {до 3-5°), поэтому можно записать: М,,,, (4) После введения в формулу 4 значения Р k -- (k - коэффициент, зависящий от формы изгиба ленты токоподвода, при , k 5, 6), а затем в формулу 1 значения д,,, ra+0,375D2 ,р ,, -(комш . ток-- - ОС, МКР. торс - 0,188r. ka Получается выражение для г. Возможны другие варианты расположения лент токоподвода с целью компенсации крутящего момента торсионного подвеса. Благодаря компенсации крутящего момента торсиона нет необходимости производить отслеживание корнуса гироприставки, что упрощает работу наблюдателя и повышает точность прибора, т. к. при этом исключается динамическое воздействие наблюдателя на ЧЭ. Предмет изобретения Маркшейдерский малогабаритный гирокомпас, содержащий теодолит с автоколлимационной системой, триггер и гироприставку с маятниковым чувствительным элементом на торсионном подвесе и ленточным токоподводом, отличающийся тем, что, с целью компенсации крутящего момента торсиона и токоподвода, в нем токоподвод выполнен в виде изогнутых в вертикальной или горизонтальной плоскости лент, концы которых закреплены на чувствительном элементе на растоянии г от его оси вращения, о:пределяемом формулой 4-6 -с где D - расстояние между закренленными концами лент токоподвода, К-жесткость торсиона, а, Ъ, с - числовые коэффициенты, зависящие от формы изгиба ленты, JE-жесткость лент токонодвода.
5 TZr
V
Ш
fua.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Маркшейдерский гирокомпас | 1990 |
|
SU1808119A3 |
| МАРКШЕЙДЕРСКИЙ ГИРОКОМПАС | 2010 |
|
RU2445574C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ ПОДЗЕМНЫХ ГОРНЫХ ВЫРАБОТОК | 2017 |
|
RU2662468C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| МАРКШЕЙДЕРСКИЙ ГИРОКОМПАС | 1970 |
|
SU288320A1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
| ГИРОТЕОДОЛИТ | 1966 |
|
SU187328A1 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
| АСТАТИЧЕСКИЙ ПОПЛАВКОВЫЙ ГИРОКОМПАС | 1969 |
|
SU252636A1 |
| Устройство для передачи направления подземных горных выработок с горизонта на горизонт через соединительный канал | 1983 |
|
SU1138496A1 |